Inventory management of a scarce vaccine for epidemic control: Uncertainty quantification of time for deliveries and order sizes based on a model of sequential decisions
Towards Reinforcement learning
SEMINARIO SOBRE MÉTODOS MATEMÁTICOS Y ALGORITMOS.
Yofre H. Garcia
Saúl Diaz-Infante Velasco
Jesús Adolfo Minjárez Sosa
sauldiazinfante@gmail.com

October 02, 2024

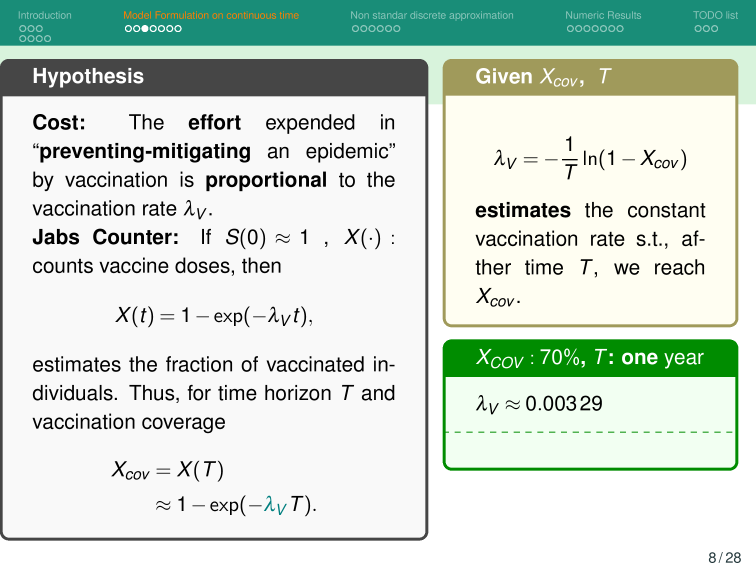
When a vaccine is in short supply, sometimes refraining from vaccination is the best response—at least for a while.
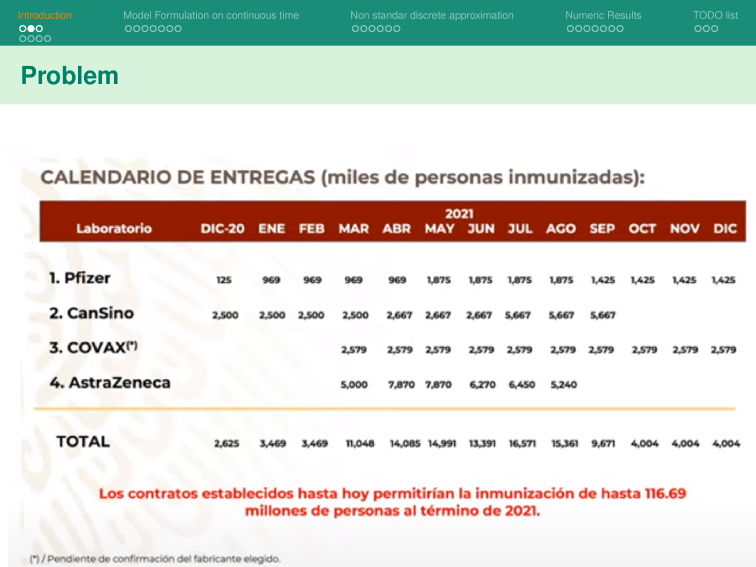
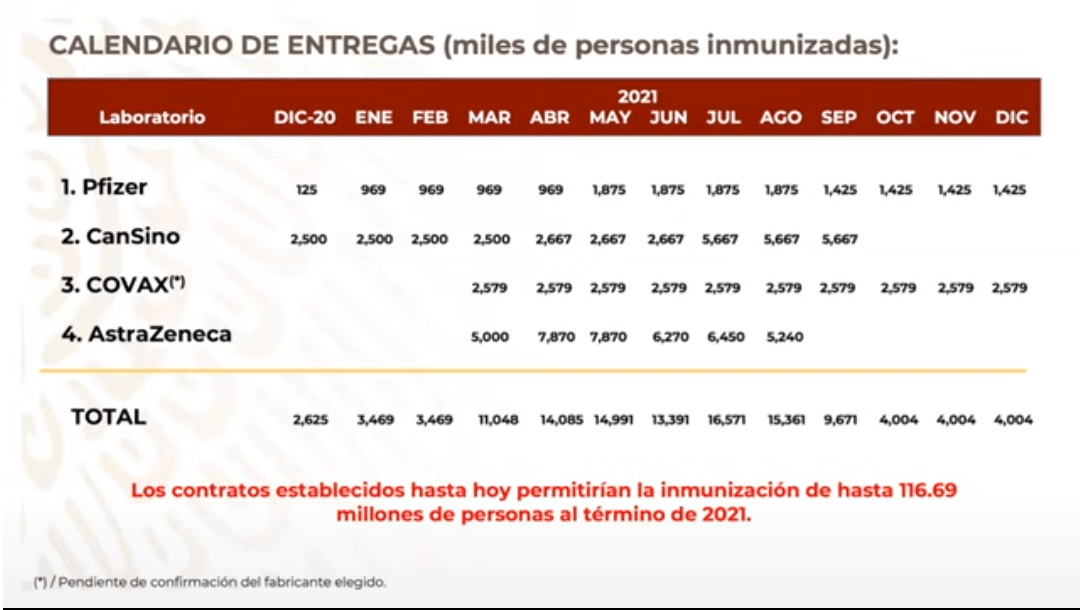
On October 13, 2020, the Mexican government announced a vaccine delivery plan by Pfizer-BioNTech and other firms as part of the COVID-19 vaccination campaign.
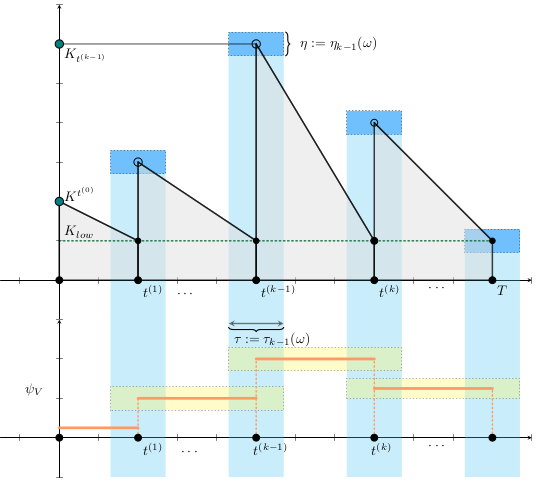
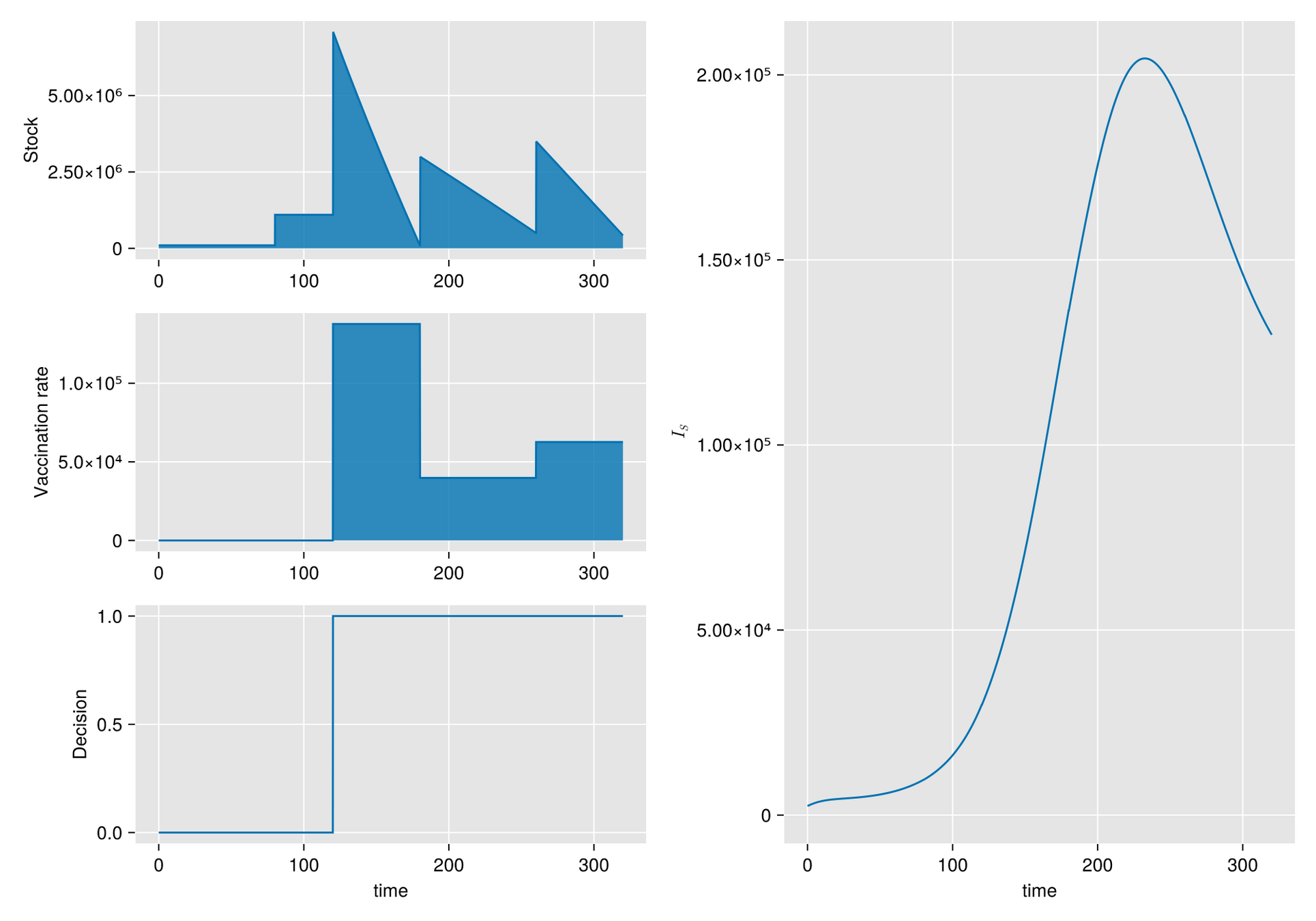
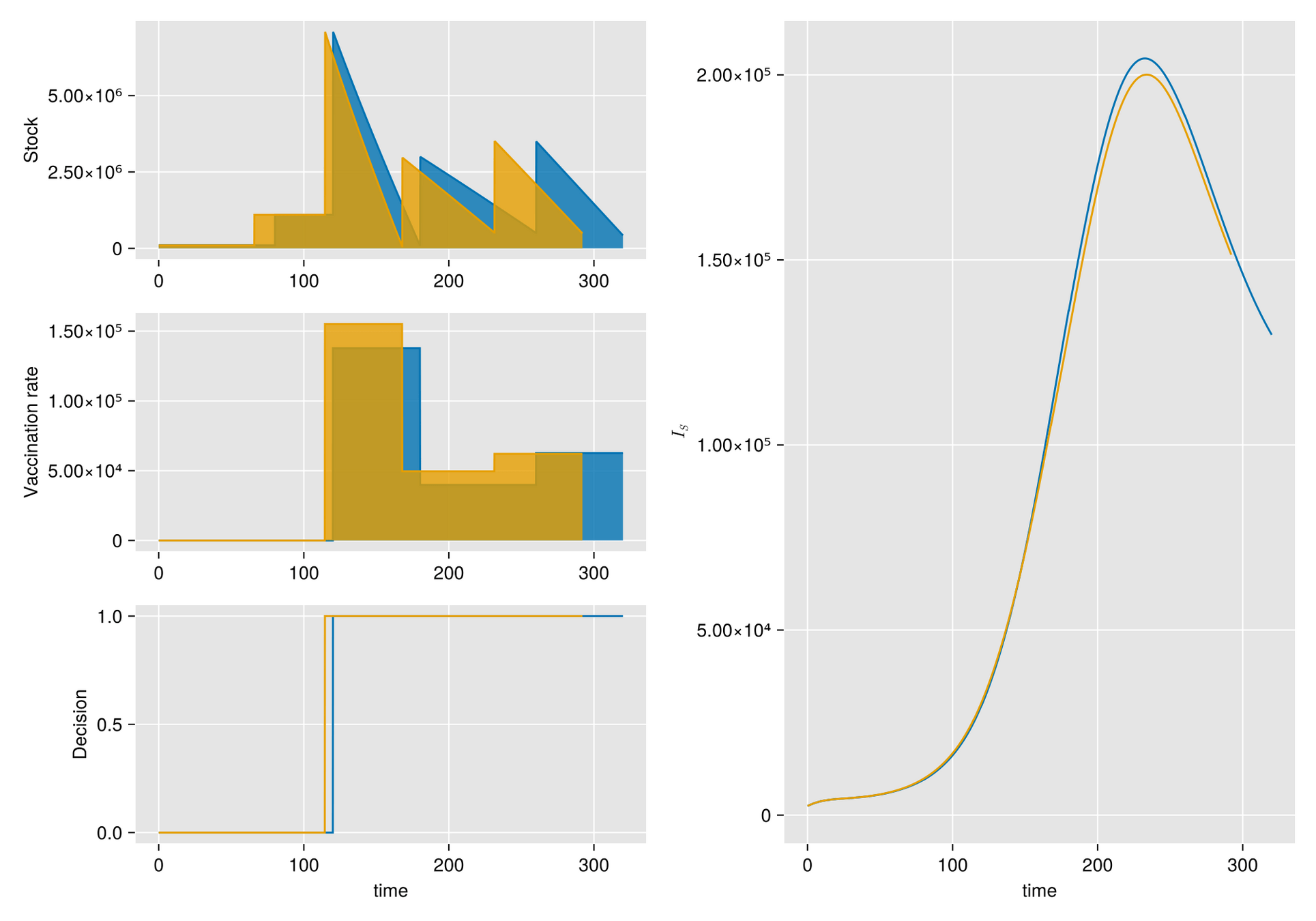
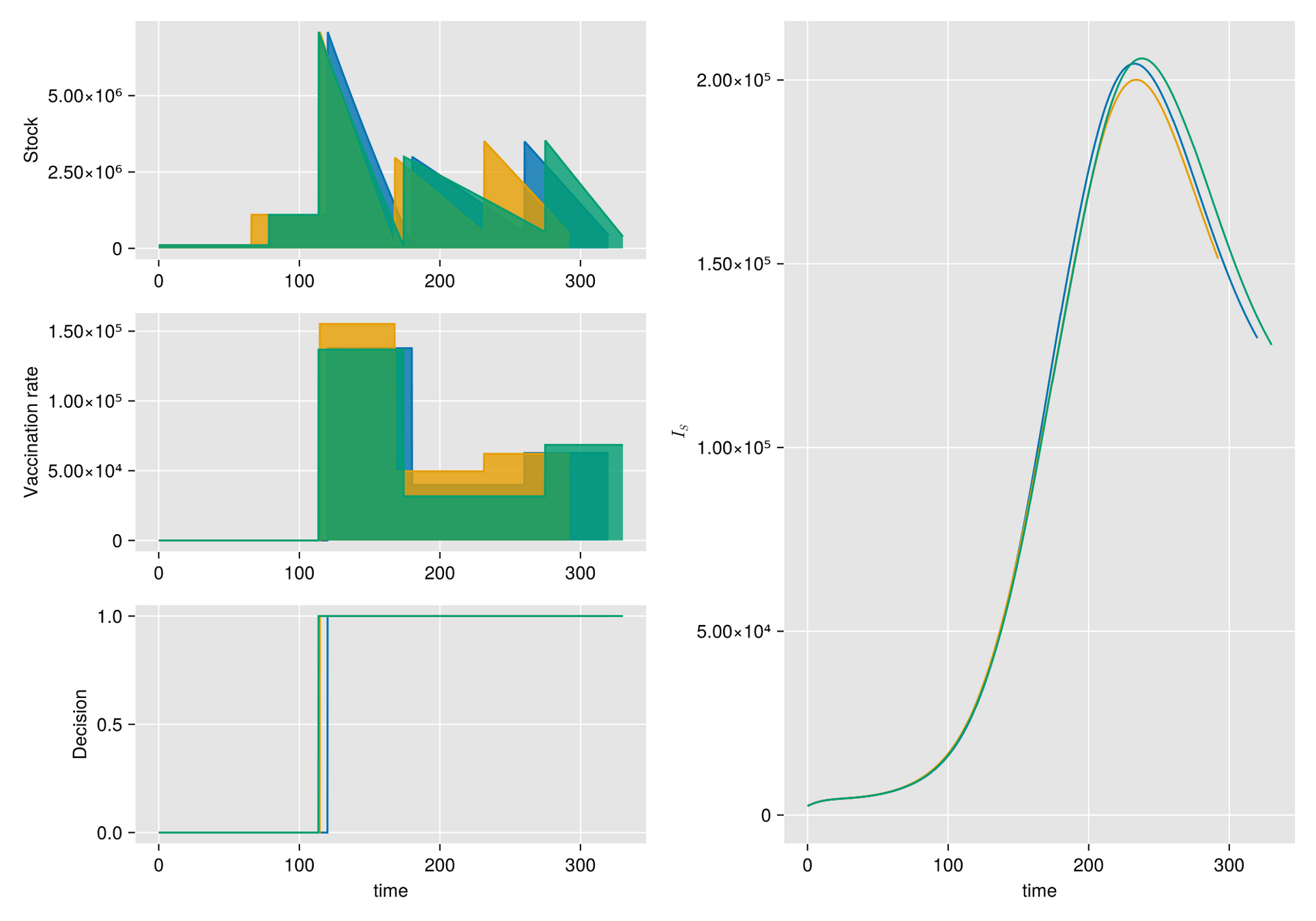
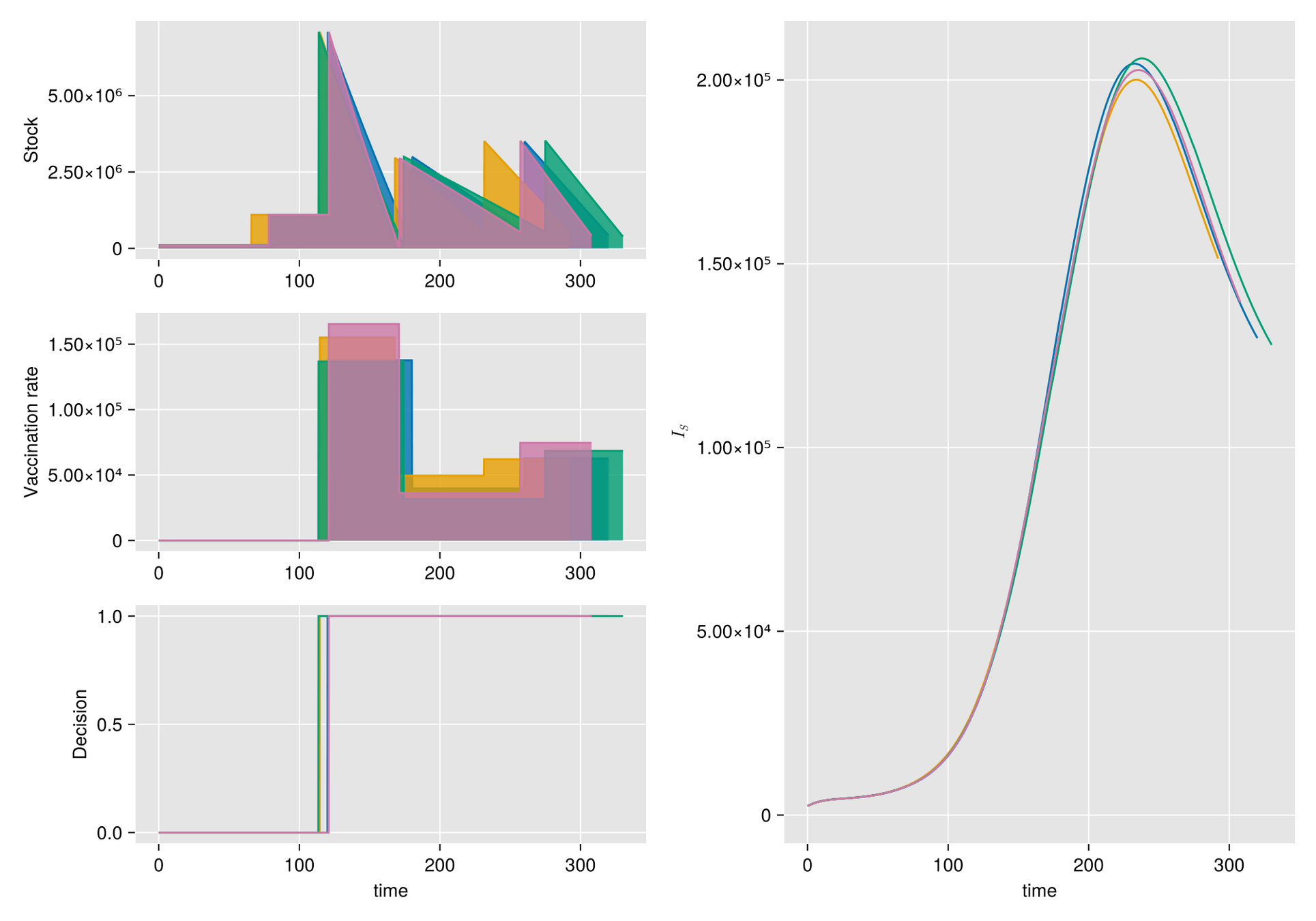
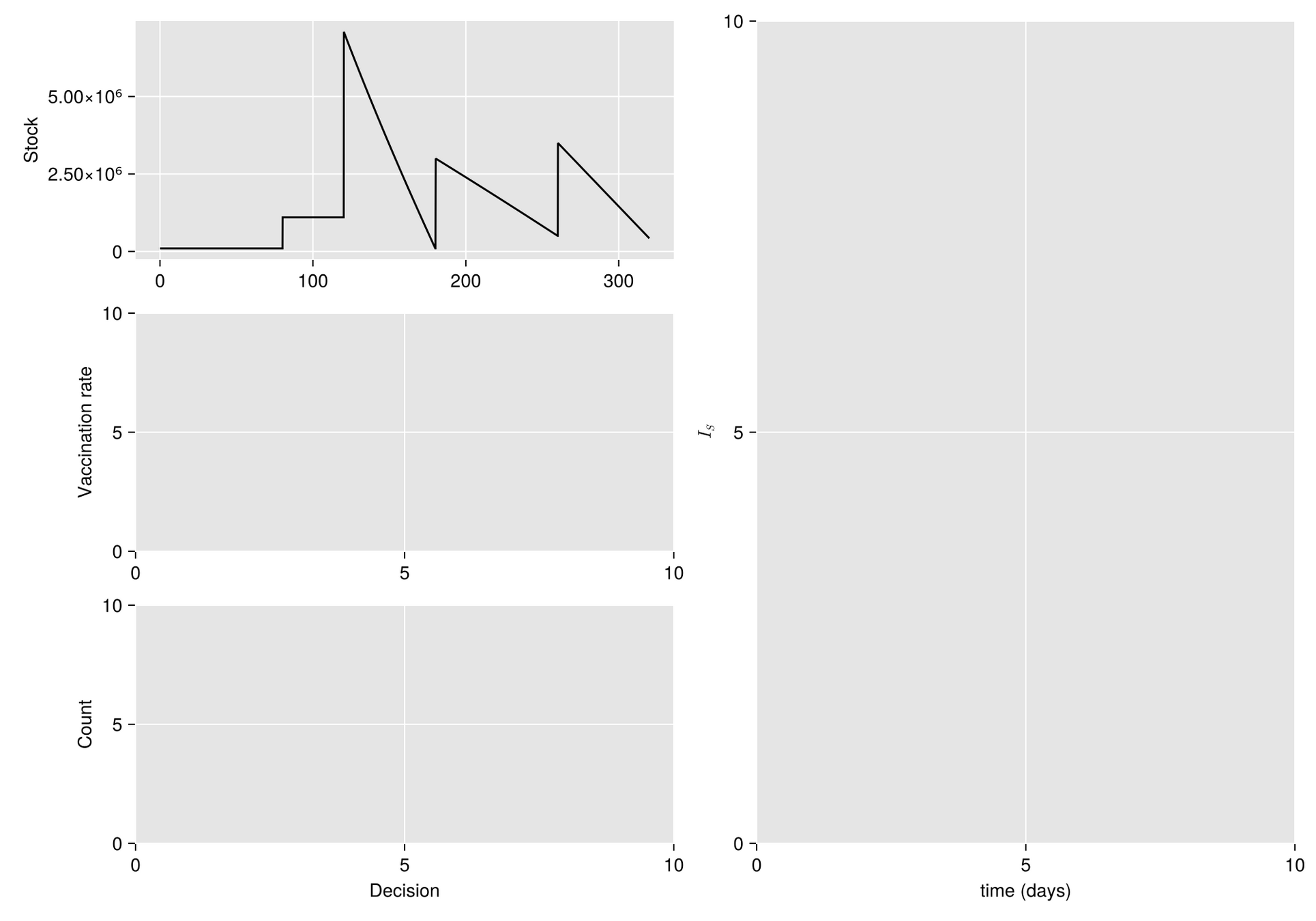
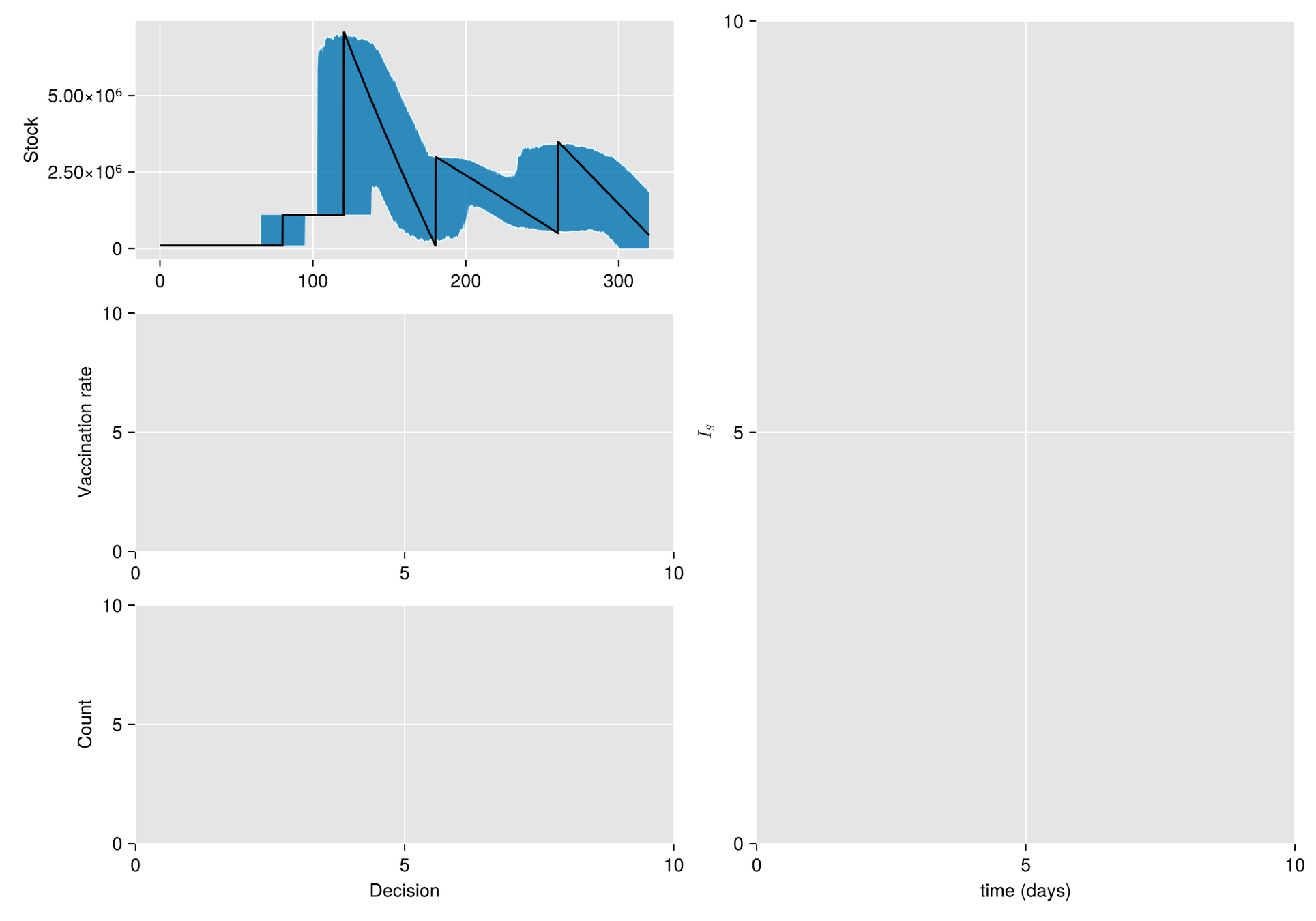
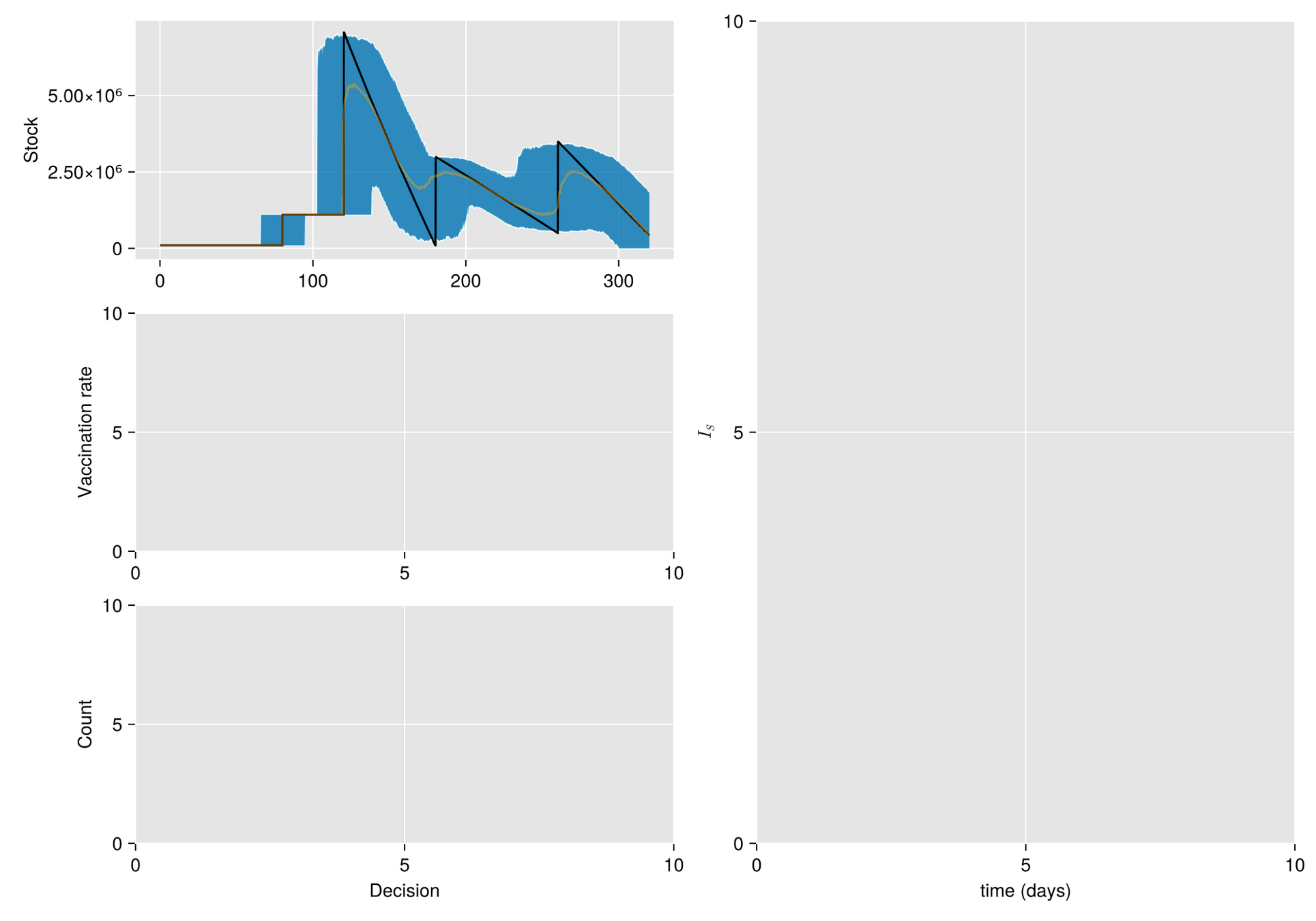
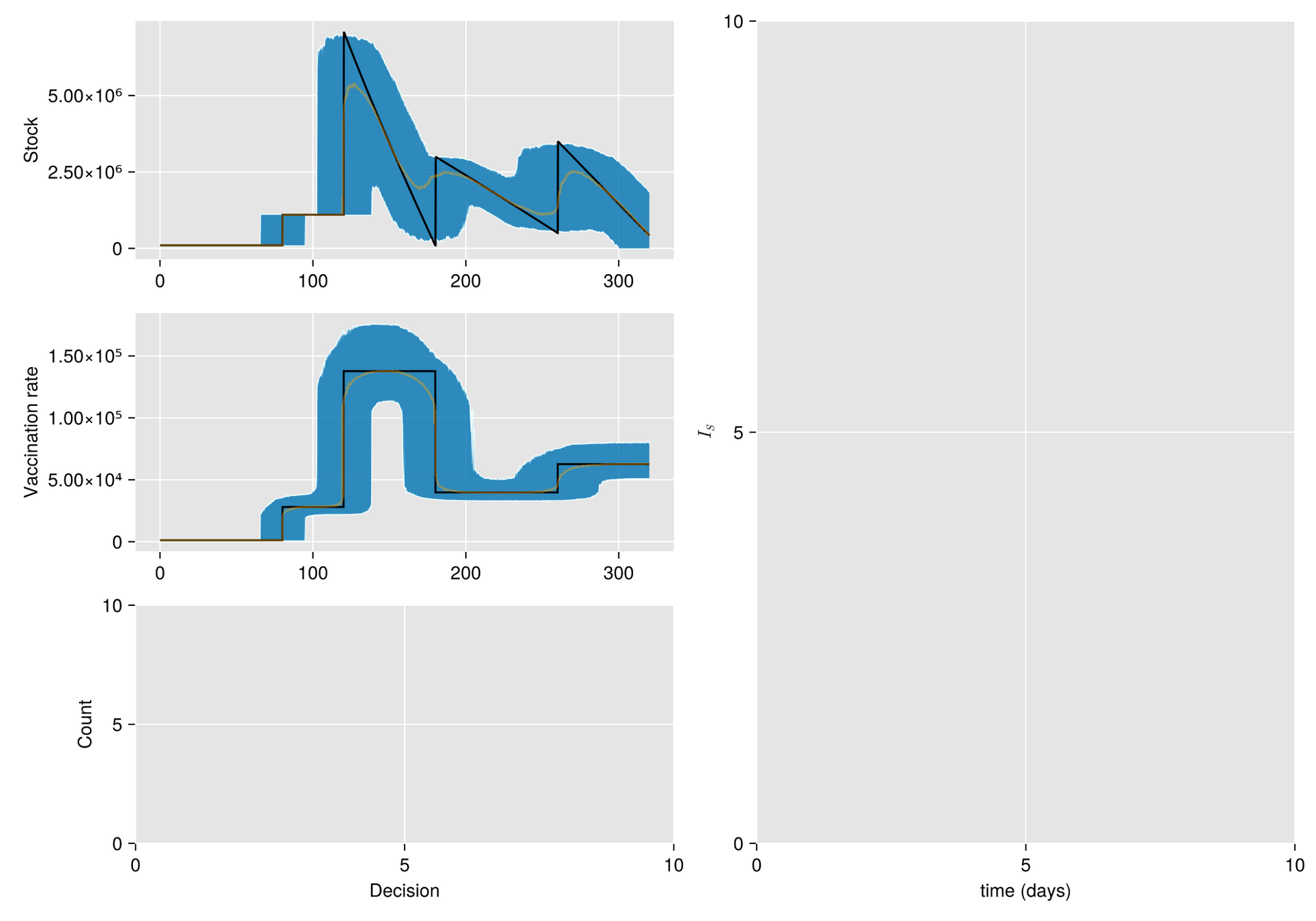
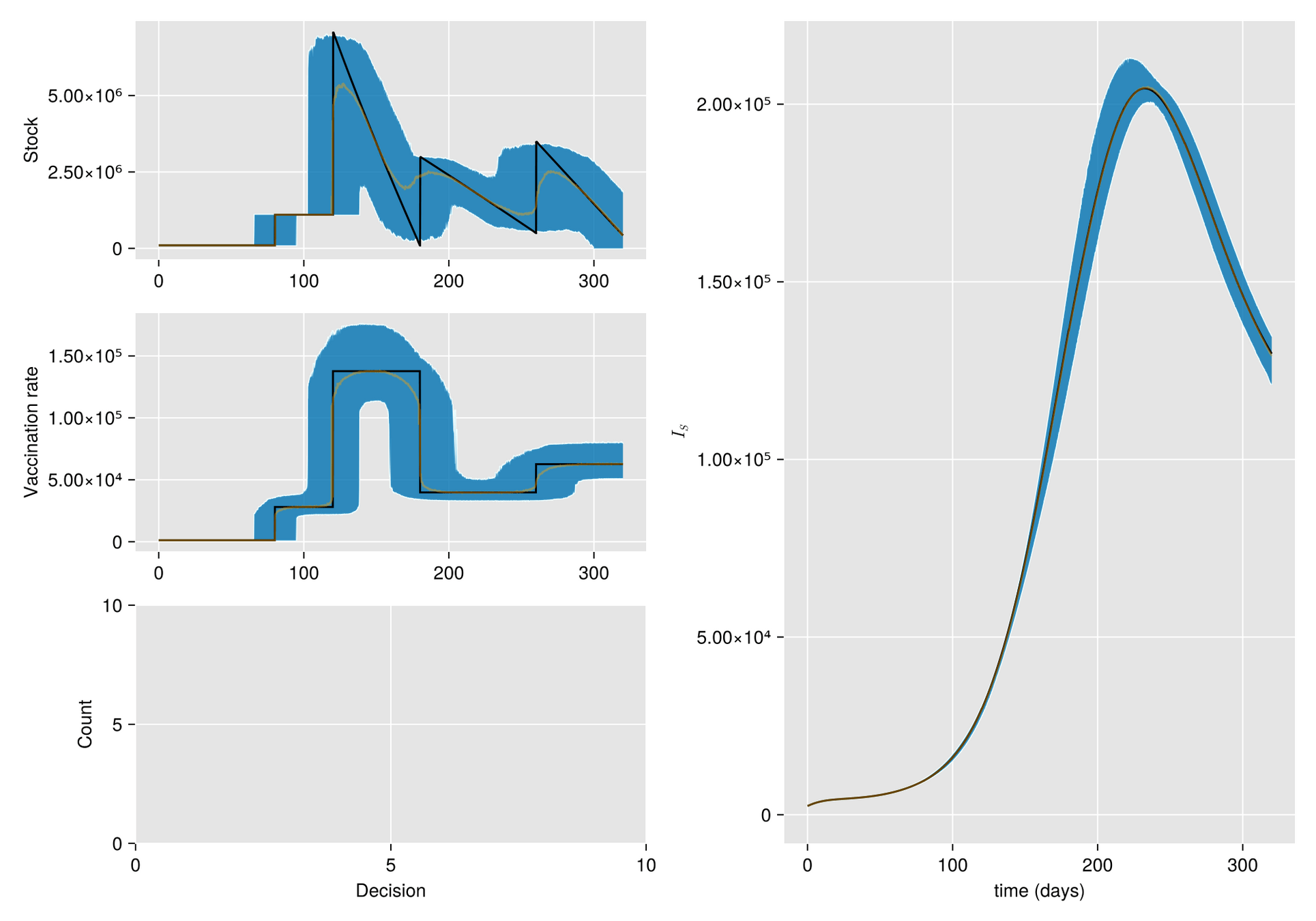
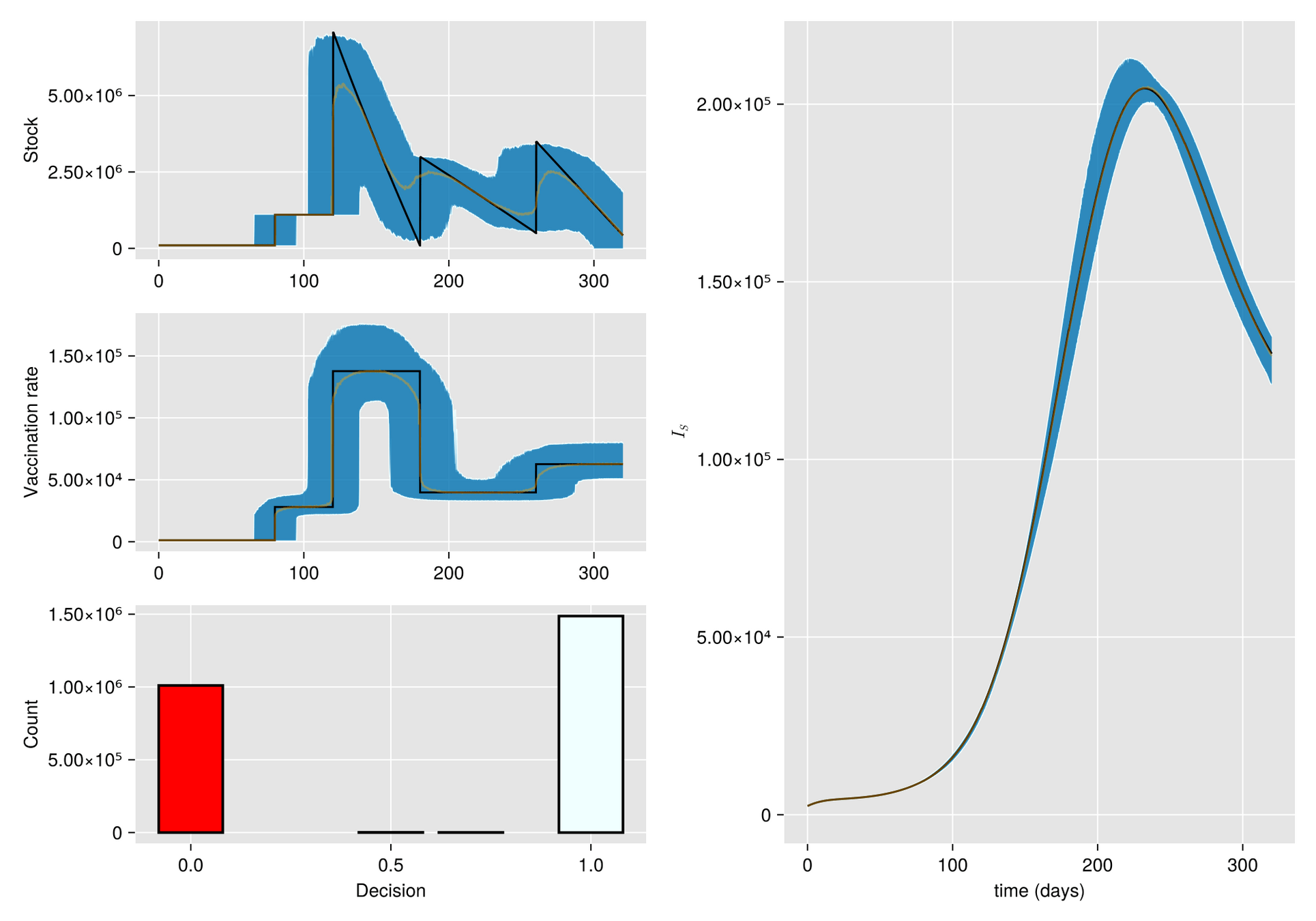
Given a shipment of vaccines calendar, describe the stock management with backup protocol and quantify random fluctuations
due to schedule or quantity.
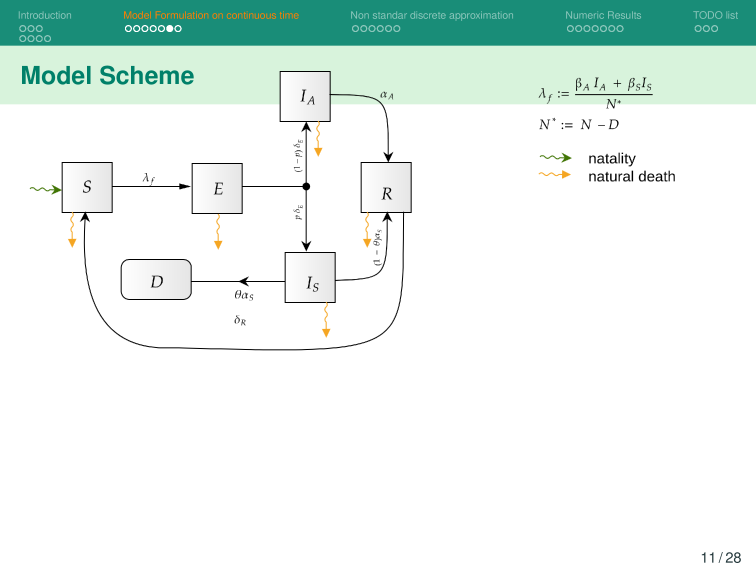
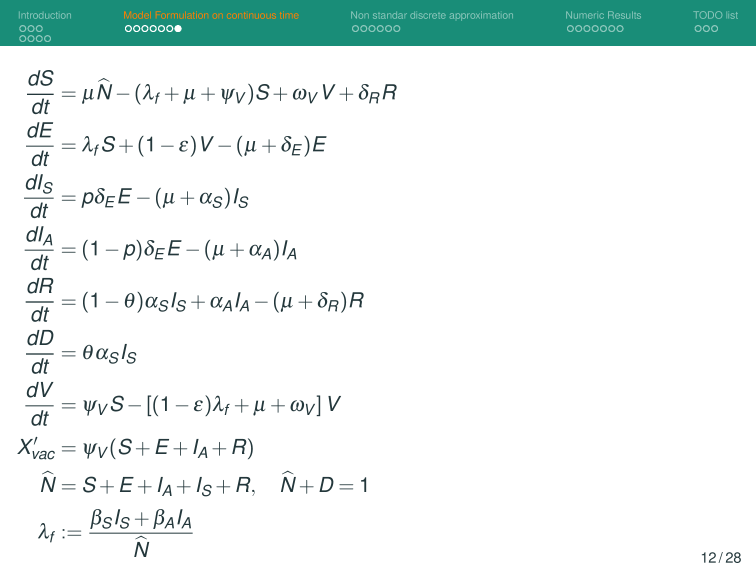
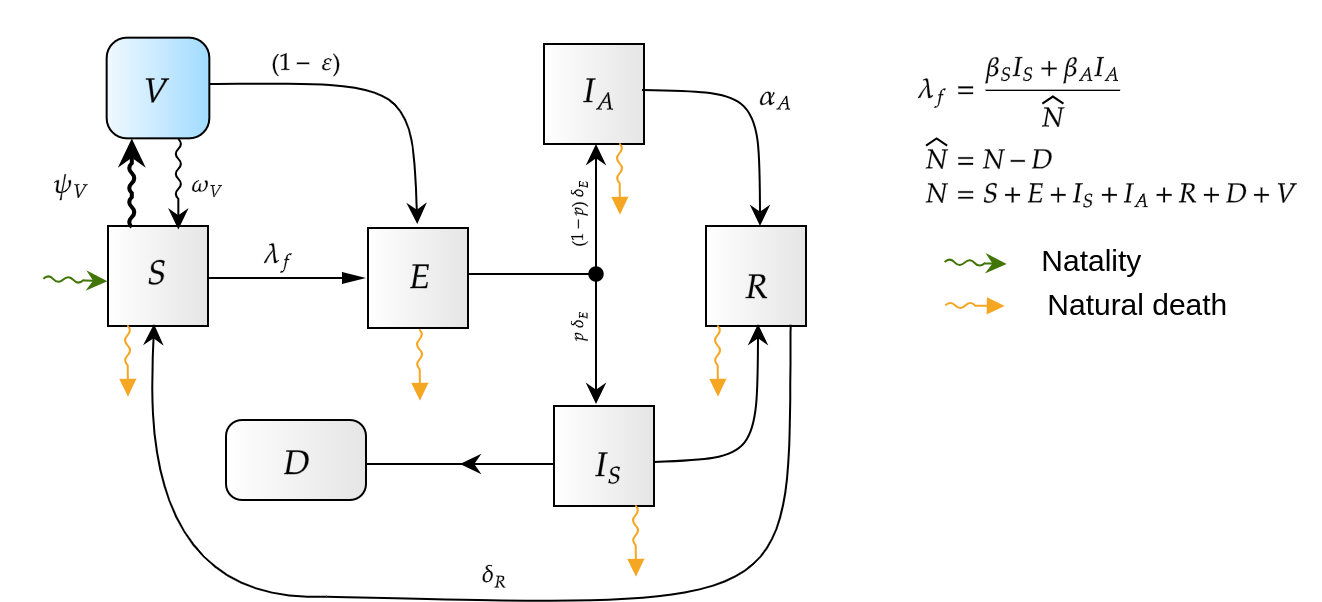
Then, incorporate this dynamic into an ODE system that describes the disease and evaluates its response accordingly.
Text
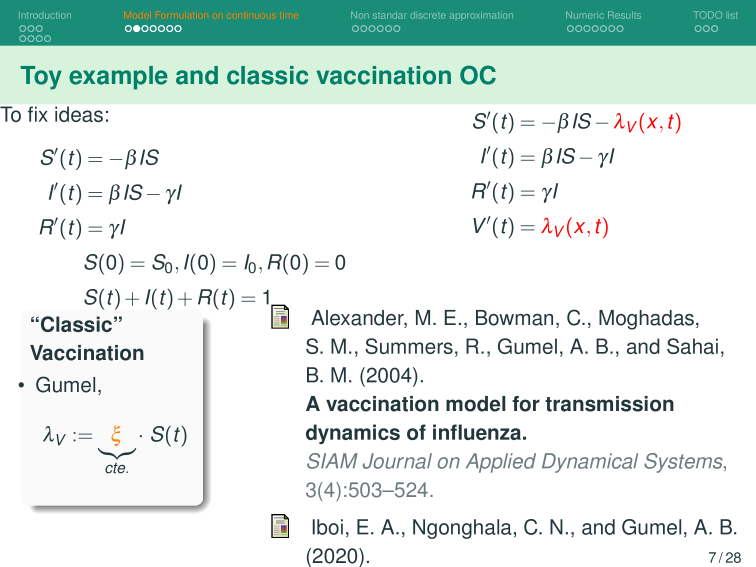
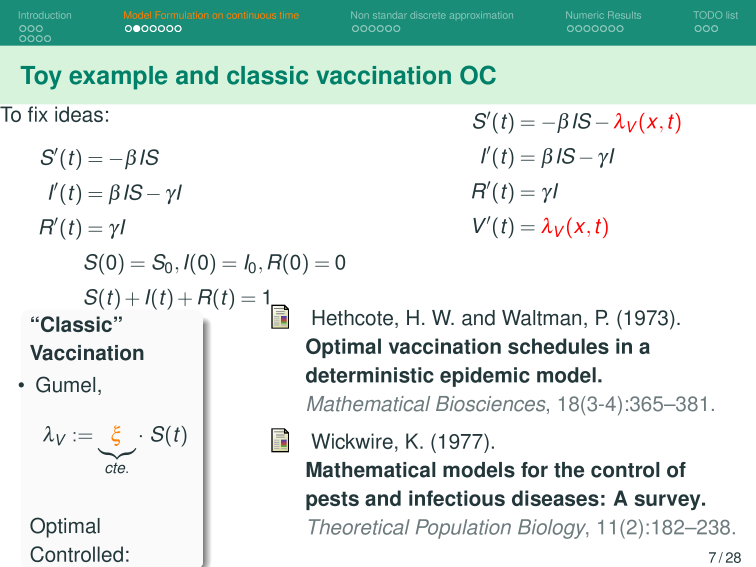
Nonlinear control: HJB and DP
Given
\frac{dx}{dt} = f(x(t))
Goal:
Desing
to follow
s. t. optimize cost
\text{action } a_t\in \mathcal{A},
\text{state } x_t
\frac{dx_{t}}{dt} =f(x_{t} ,a_{t})
Agent
a_t\in \mathcal{A}
x_t
J(x_t, a_t, 0, T) = Q(x_T, T)
+ \int_0^T \mathcal{L}(x_{\tau}, a_{\tau}) d_{\tau}
J(x_t, a_t, 0, T) .















\begin{aligned}
%C_{t+1}
&=
C(x_{t}, a_{t})
\\
%\Phi_{t+1}^{h}(x_t,a_t)
&=
x_t +\varphi(h,\theta, a^{\theta}_t)
\end{aligned}
Agent
R_{t+1}
x_{t+1}
x_0,a_0,R_1,
a_t\in \mathcal{A}(x_t)
action
state
x_{t}
reward
R_{t}
x_0, a_0, R_1,
x_1, a_1, R_2,
\cdots,
x_t, a_t, R_{t+1}
\cdots,
x_{T-1}, a_{T-1}, R_T,
x_T
G_t := R_{t+1} + \cdots + R_{T-1} + R_{T}
\begin{aligned}
G_t &:= R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3}+ \cdots
\\
&=
\sum_{k=0}^{\infty}
\gamma^{k} R_{t+1+k}, \qquad \gamma \in [0,1)
\end{aligned}
G_t := R_{t+1} + \cdots + R_{T-1} + R_{T}
p(s^{\prime},r | s, a)
:= \mathbb{P}[x_t=s^{\prime}, R_{t}=r | x_{t-1}=s, a_t=a]
\begin{aligned}
r(s, a)
&:= \mathbb{E}[
R_t | x_{t-1}=s, a_{t-1}=a
]
\\
&=
\sum_{r\in \mathcal{R}}
r
\sum_{s^{\prime}\in S}
p(s^{\prime}, r | s, a)
\end{aligned}
\begin{aligned}
G_t &:= R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{T-t-1} R_{T}
\\
&=\sum_{k=t+1}^{T}
\gamma^{k-t-1} R_k
\end{aligned}
Discounted return
Total return
\begin{aligned}
v_{\pi}(s) &:=
\mathbb{E}_{\pi}
[G_t | x_t = s]
\\
&=
\mathbb{E}_{\pi}
\left[
\sum_{k=0}^{\infty}
\gamma^{k} R_{t+k+1}
\big| x_t =s
\right]
\end{aligned}
\pi(a|s):= \mathbb{P}[a_t = a|x_t=s]
\begin{aligned}
v_{\pi}(s) &:=
\mathbb{E}_{\pi}
[G_t | x_t = s]
\\
&=
\mathbb{E}_{\pi}
\left[
\sum_{k=0}^{\infty}
\gamma^{k} R_{t+k+1}
\big| x_t =s
\right]
\\
& =
\mathbb{E}_{\pi}
\left[
R_{t+1} + \gamma G_{t+1} | x_t = s
\right]
\\
&=
\sum_{a} \pi(a |s)
\sum_{s^{\prime}, r} p(s^{\prime},r | s, a)
\left[
r
+
\gamma
\mathbb{E}_{\pi}[G_{t+1} | x_{t+1}=s^{\prime}]
\right]
\\
&=
\sum_{a} \pi(a |s)
\sum_{s^{\prime}, r} p(s^{\prime},r | s, a)
\left[
r
+
\gamma v_{\pi}(s^{\prime})
\right]
\end{aligned}
\begin{aligned}
v_{*}(s) &:=
\max_{\pi}
v_{\pi}(s)
\\
&=
\max_{a\in \mathcal{A}(s)}
\mathbb{E}_{\pi_{*}}
\left[
\sum_{k=0}^{\infty}
\gamma^{k} R_{t+k+1}
\big| x_t =s
\right]
\\
& =
\max_{a\in \mathcal{A}(s)}
\mathbb{E}_{\pi}
\left[
R_{t+1} + \gamma G_{t+1} | x_t = s
\right]
\\
&=
\max_{a\in \mathcal{A}(s)}
\sum_{a} \pi(a |s)
\sum_{s^{\prime}, r} p(s^{\prime},r | s, a)
\left[
r
+
\gamma
\mathbb{E}_{\pi}[G_{t+1} | x_{t+1}=s^{\prime}]
\right]
\\
&=
\max_{a\in \mathcal{A}(s)}
\sum_{a} \pi(a |s)
\sum_{s^{\prime}, r} p(s^{\prime},r | s, a)
\left[
r
+
\gamma v_{\pi}(s^{\prime})
\right]
\end{aligned}
x_0, a_0, R_1,
x_1, a_1, R_2,
\cdots,
x_t, a_t, R_{t+1}
\cdots,
x_{T-1}, a_{T-1}, R_T,
x_T
\begin{aligned}
\gamma &= 0
\\
G_t &:= R_{t+1} + \cancel{\gamma R_{t+2}} + \cdots + \cancel{\gamma^{T-t-1} R_{T}}
\end{aligned}
Dopamine Reward

\begin{aligned}
&\min_{a_{0}^{(k)} \in \mathcal{A}_0}
c(x_{\cdot}, a_0):=
c_1(a_0^{(k)})\cdot T^{(k)} +
\sum_{n=0}^{N-1}
c_0(t_n, x_{t_n}) \cdot h
\\
\text{ s.t.} &
\\
&
x_{t_{n+1}}
= x_{t_n}
+ F(x_{t_n}, \theta, a_0) \cdot h,
\quad x_{t_0} = x(0),
%\\
%\text{where: }&
%\\
%t_n &:=
%n \cdot h, \quad
%n = 0, \cdots, N,
%\quad t_{N} = T.
\end{aligned}
\begin{aligned}
C(x_{t^{(k+1)}}, & a_{t^{(k+1)}})
=
\\
& C_{YLL}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{YLD}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{stock}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{campaign}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\end{aligned}
\begin{aligned}
x_{t_{n+1}}^{(k)} &
= x_{t_n}^{(k)}
+ F(x_{t_n}^{(k)}, \theta^{(k)}, a_0^{(k)}) \cdot h^{(k)},
\quad x_{t_0^{(k)}} = x^{(k)}(0),
\\
\text{where: }&
\\
t_n^{(k)} &:=
n \cdot h^{(k)}, \quad
n = 0, \cdots, N^{(k)},
\quad t_{N}^{(k)} = T^{(k)}.
\end{aligned}
J(x,\pi) = E\left[ \sum_{k=0}^M C(x_{t^{(k)}},a_{t^{(k)}}) | x_{t^{(0)}} = x , \pi \right]
\begin{aligned}
C(x_{t^{(k+1)}}, & a_{t^{(k+1)}})
=
\\
& C_{YLL}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{YLD}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{stock}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\\
+& C_{campaign}(x_{t^{(k+1)}},a_{t^{(k+1)}})
\end{aligned}
\begin{aligned}
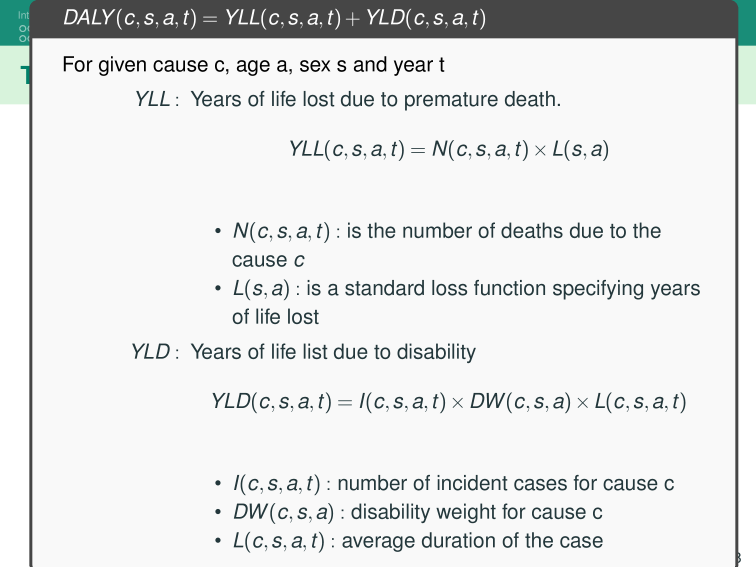
C_{YLL}(x_{t^{(k+1)}},a_{t^{(k+1)}})
&=
\int_{t^{(k)}}^{t^{(k+1)}} YLL dt,
\\
C_{YLD}(x_{t^{(k+1)}},a_{t^{(k+1)}})
&=
\int_{t^{(k)}}^{t^{(k+1)}} YLD(x_t, a_t) dt
\\
YLL(x_t, a_t) &:=
m_1 p \delta_E (E(t) - E^{t^{(k)}} ),
\\
YLD(x_t, a_t) &:=
m_2 \theta \alpha_S(E(t) - E^{t^{(k)}}),
\\
t &\in [t^{(k)},t^{(k + 1)}]
\end{aligned}
\begin{aligned}
C_{stock}(x_{t^{(k+1)}},a_{t^{(k+1)}})
& = \int_{t^{(k)}}^{t^{(k+1)}} m_3(K_{Vac}(t) - K_{Vac}^{t^{(k)}}) dt
\\
C_{campaign}(x_{t^{(k+1)}},a_{t^{(k+1)}})
&=\int_{t^{(k)}}^{t^{(k+1)}} m_4(X_{vac}(t) - X_{vac}^{t^{(k)}}) dt
\end{aligned}
\frac{dx_{t}}{dt} =f(x_{t} ,a_{t})
Agent
a_t\in \mathcal{A}
C_t
x_t
\begin{aligned}
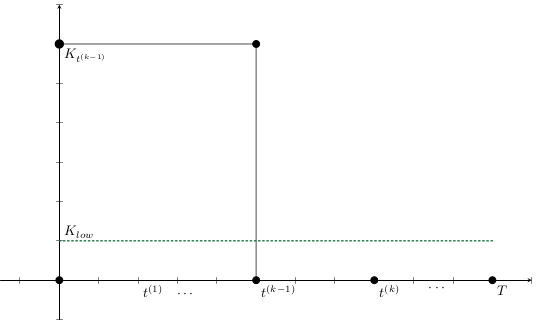
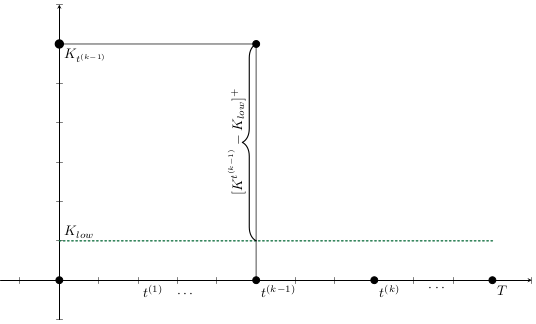
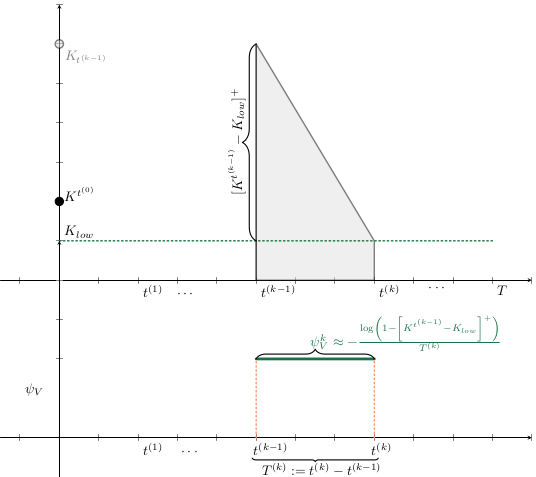
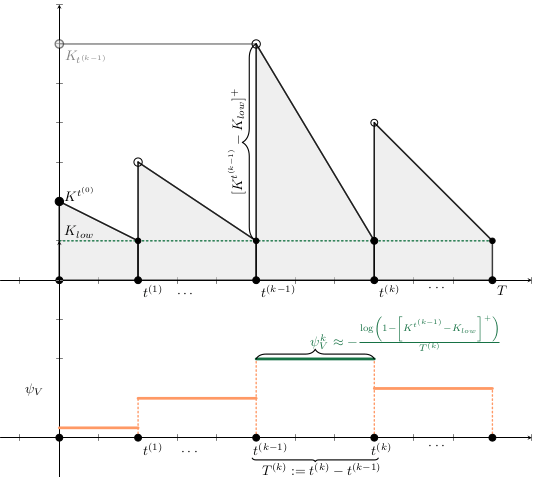
a_t^{(k)} &= p_i \cdot \Psi_V^{(k)}
\\
p_i &\in \mathcal{A}:=\{p_0, p_1, \dots, p_M\}
\\
p_i &\in [0, 1]
\end{aligned}
Deterministic Control

https://slides.com/sauldiazinfantevelasco/cinvestav-smma-oct-02-2024
Gracias!!

CINVESTAV-SeminarioSobreMetodosMatematicosAlgoritmos
By Saul Diaz Infante Velasco
CINVESTAV-SeminarioSobreMetodosMatematicosAlgoritmos
Explore innovative strategies for managing scarce vaccines in inventory! See how uncertainty in delivery times and order sizes impacts epidemic control efforts.



