

Stefan Sommer
Professor at Department of Computer Science, University of Copenhagen
Faculty of Science, University of Copenhagen
Stefan Sommer and Alex Bronstein
Department of Computer Science, University of Copenhagen
Technion – Israel Institute of Technology
Geometric deep learning
deep learning with manifold target or manifold domain (Bronstein'17)
Objectives:
Sommer, Bronstein: Horizontal Flows and Manifold Stochastics in Geometric Deep Learning. TPAMI, 2020, doi: 10.1109/TPAMI.2020.2994507
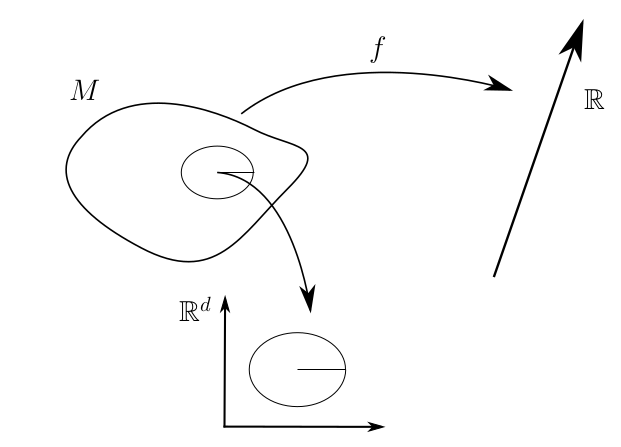
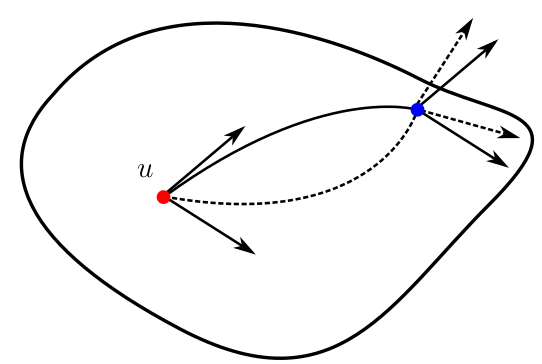
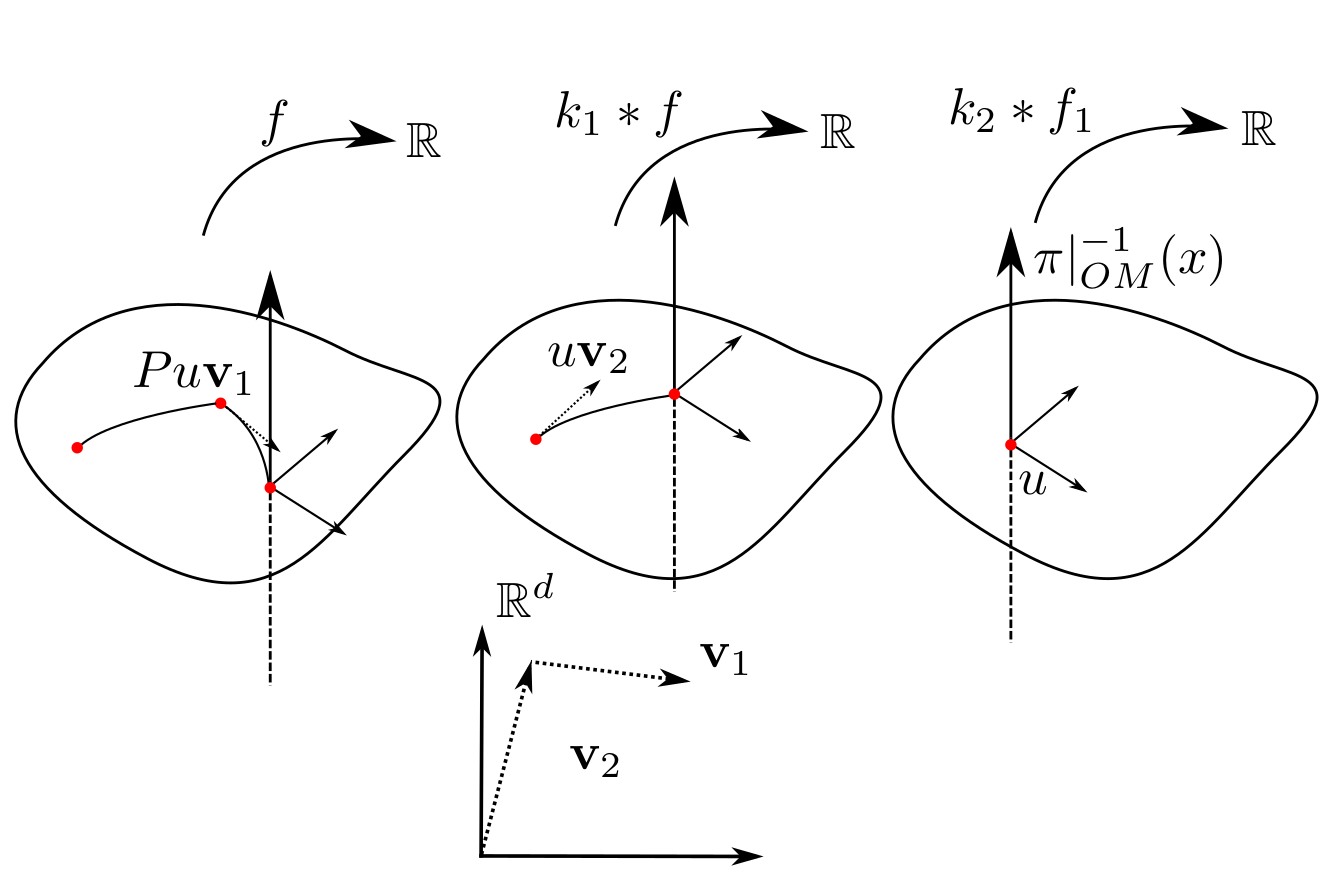
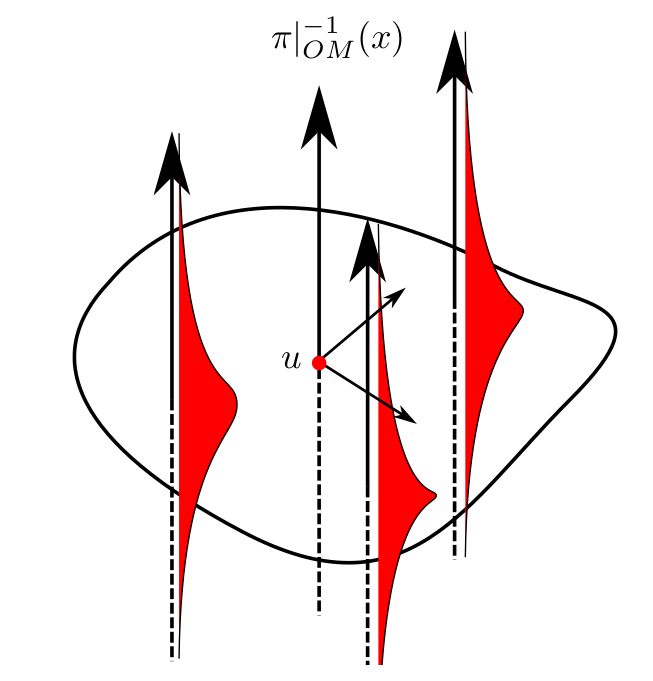
Directional functions: \(f:OM\to\mathbb R\)
\[k\ast f(u)=\int_{\R^d}k(-\mathbf v)f(P_{\gamma(x,u\mathbf v)}(u))d\mathbf v\]
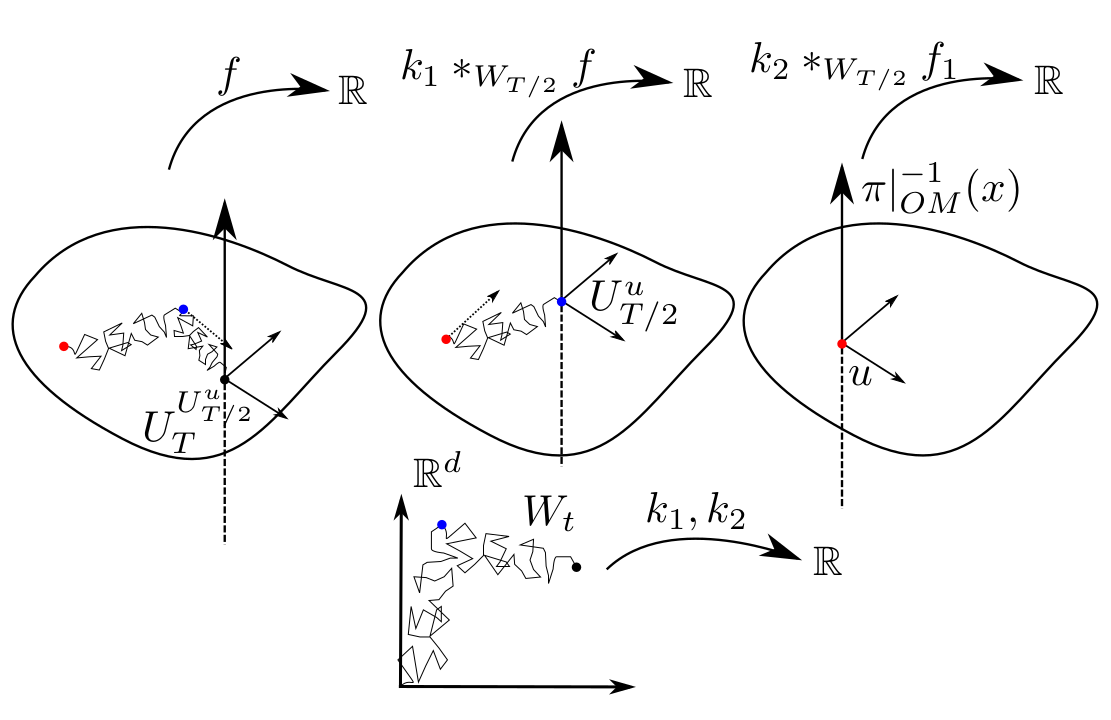
\(k_1,k_2\) kernels with \(\mathrm{supp}(k_i)\subseteq B_r(0)\), and \(f\in C^3(OM,\mathbb R)\)
Riemannian curvature: \(R(v,u)=-\mathcal{C}([h_u(v),h_u(w)])\)
Theorem:
Non-commutativity:
\(k_2\ast (k_1\ast f)-k_1\ast (k_2\ast f) =\)
\(\int_{\mathbb R^d} \int_{\mathbb R^d} k_2(-\mathbf v_2)k_1(-\mathbf v_1) [h_u(u\mathbf v_2),h_u(u\mathbf v_1)]f d\mathbf v_1 d\mathbf v_2 + o(r^{d+1})\)
+ non-associtativity
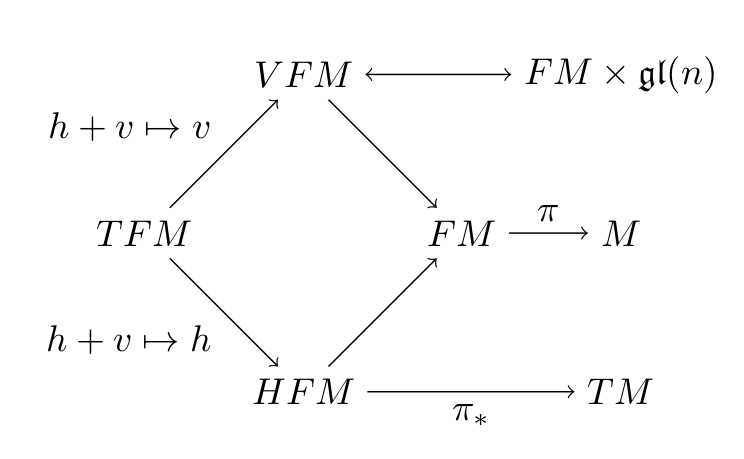
\(h_u=(\pi_*|_{H_uFM})^{-1}\)
\(H_i(u)=h_u(ue_i)\)
\[k\ast f(u)=\int_{\R^d}k(-\mathbf v)f(P_{\gamma(x,u\mathbf v)}(u))d\mathbf v\]
Non-commutativity:
\(k_2\ast (k_1\ast f)-k_1\ast (k_2\ast f) =\)
\(\int_{\mathbb R^d} \int_{\mathbb R^d} k_2(-\mathbf v_2)k_1(-\mathbf v_1) [h_u(u\mathbf v_2),h_u(u\mathbf v_1)]f d\mathbf v_1 d\mathbf v_2 + o(r^{d+1})\)
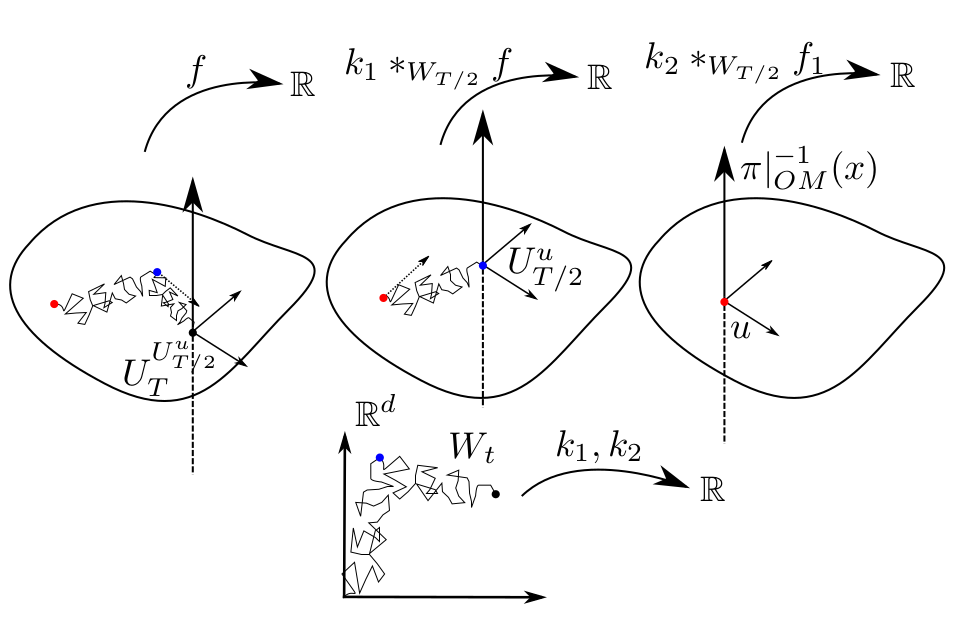
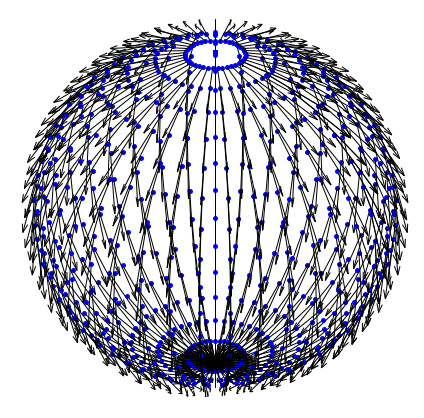
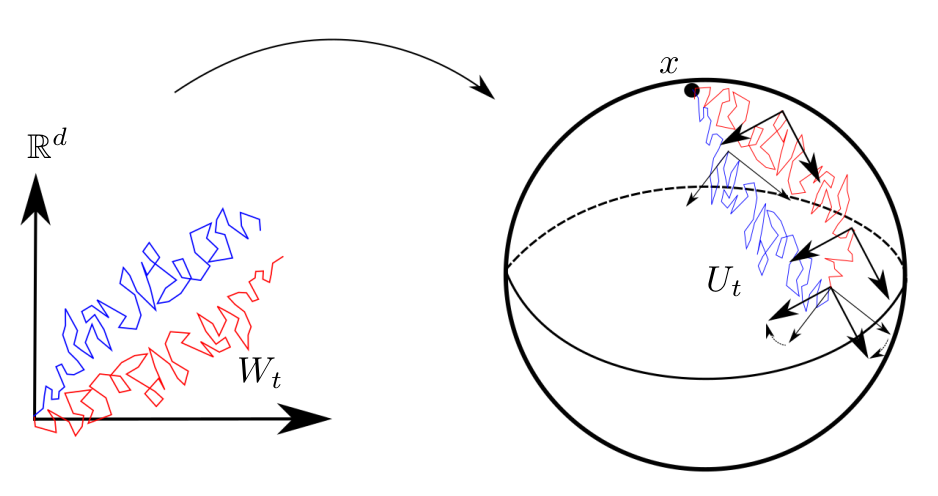
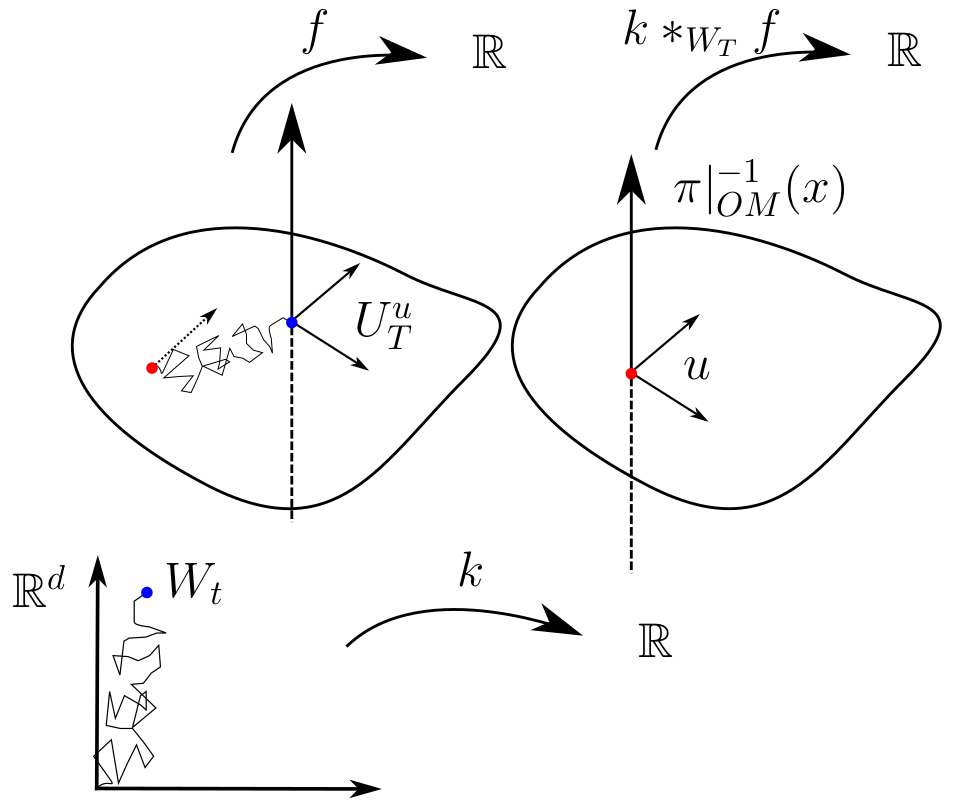
Stochastic development:
\(dU_t=\sum_{i=1}^d H_i\circ_{\mathcal S} dW_t^i\)
\(W_t\) Euclidean Brownian motion
\(X_t=\pi(U_t)\) Riemannian Brownian motion
\(X_t\) supports stochastic parallel transport
Fix \(T>0\): \(U_T\) probability distribution in \(FM\)
... as opposed to geodesics only
Need measure on path space \(W ([0, T ], M )\)
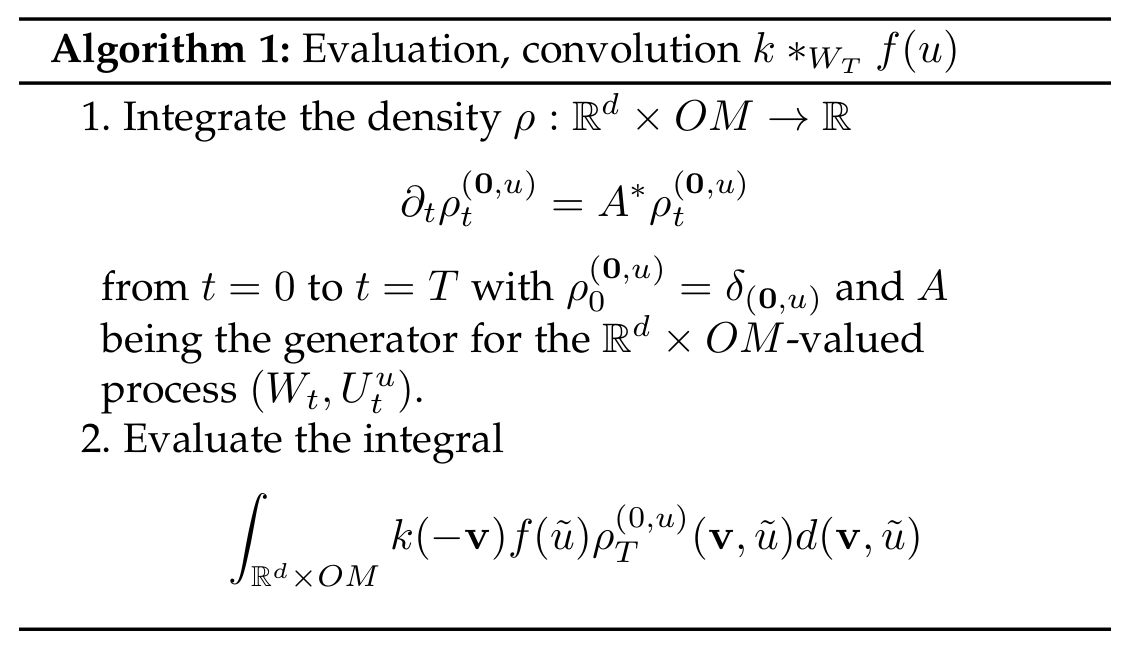
\(k\ast_{W_T} f(u)=\int k(-W_T)f(U_T^u)\mathbb P(dW_t)=\mathrm{E}[k(-W_T)f(U_T^u)]\)
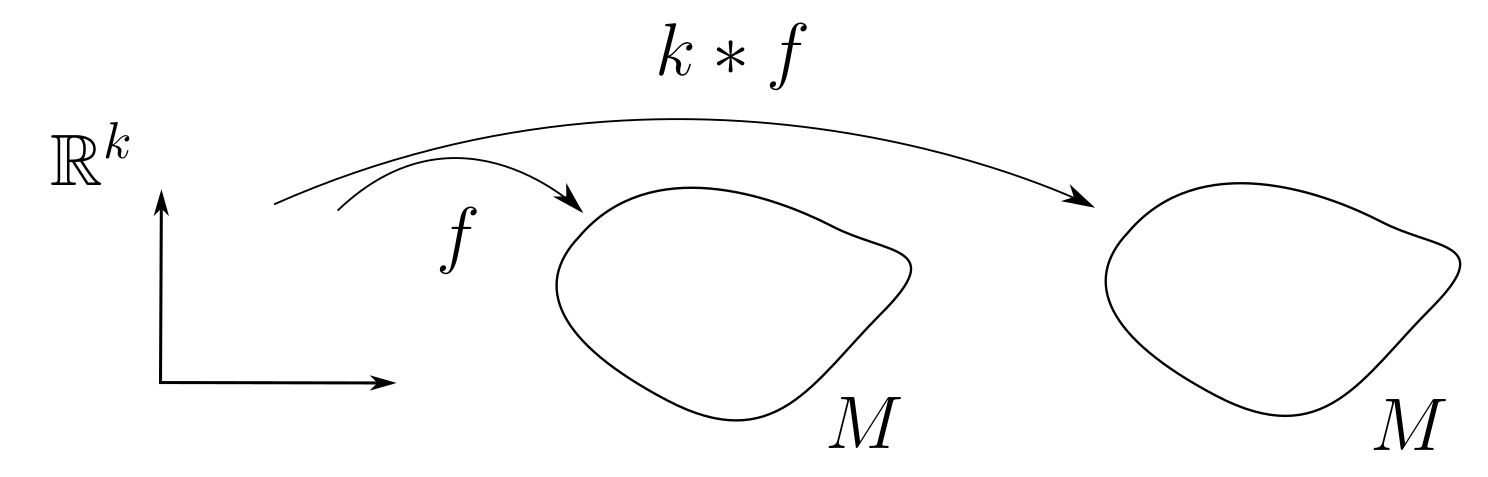
Manifold target:
Euclidean convolution:
\[k\ast f(\mathbf x)=\argmin_{\mathbf y\in\mathbb R}\mathrm E[k(\mathbf x-\mathbf z)\|\mathbf y-f(\mathbf z)\|^2]\]
conv. from weighted Fréchet mean: (Pennec'06/Chakraborty'19/'20)
\[k\ast f(x)=\argmin_{y\in M}\mathrm E[k(x,z)d(y,f(z))^2)]\]
kernel: \(k:M\times M\to\mathbb R\), \(\mathrm E[k(x,\cdot)]=1\)
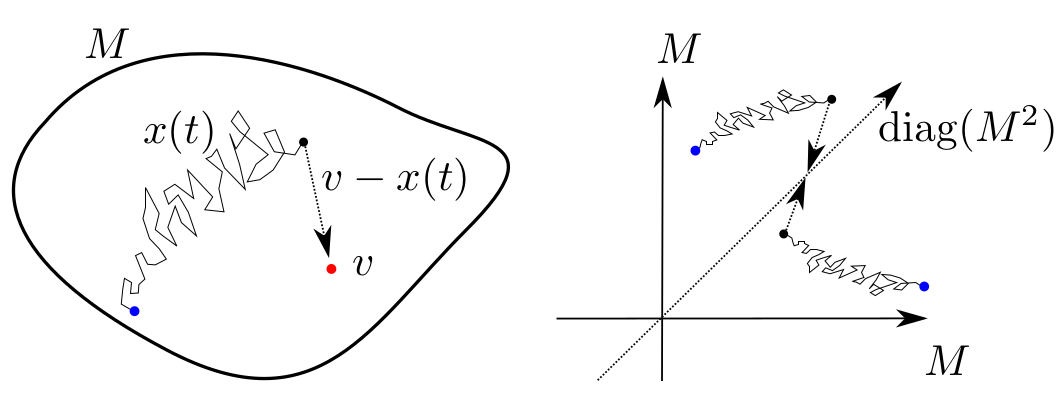
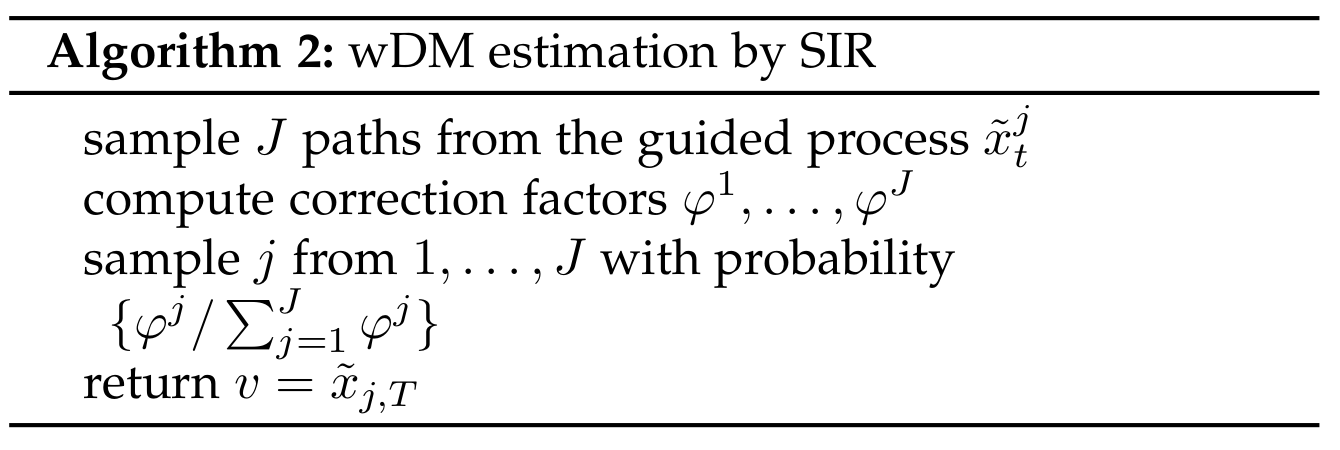
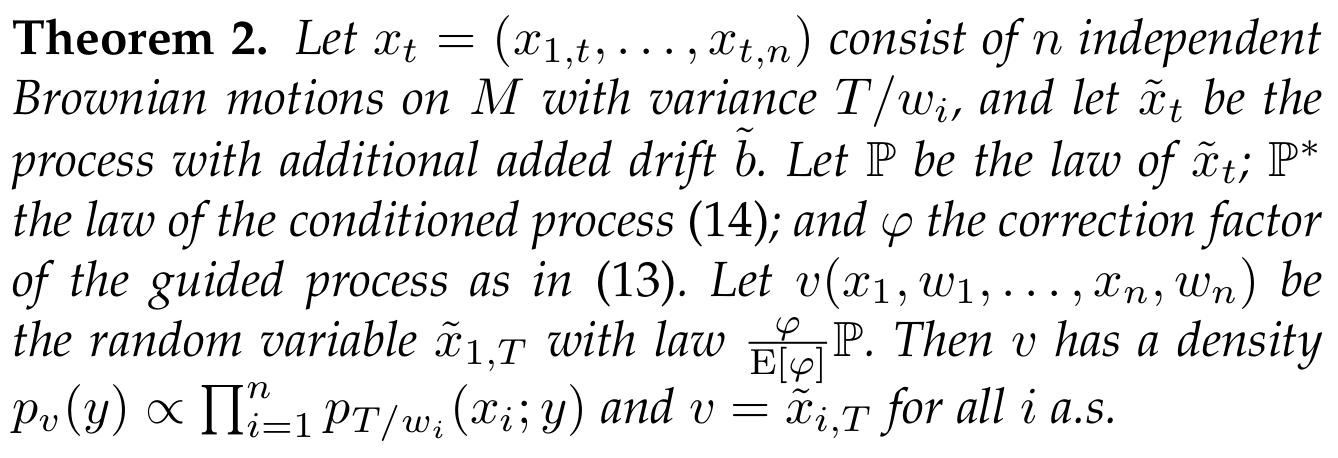
bridge sampling: target \(v\)
bridge sampling: target \(\mathrm{diag}(M^2)\)
Stochasticity analogous to deep Gaussian process NNs (Gal'16): \[\mathbf y|\mathbf x,w=\mathcal{N}(\hat{y}(\mathbf x,w),\tau^{-1})\]
code: http://bitbucket.com/stefansommer/jaxgeometry
slides: https://slides.com/stefansommer
References:
By Stefan Sommer



