


Stefan Sommer
Professor at Department of Computer Science, University of Copenhagen
Stefan Sommer, University of Copenhagen
Faculty of Science, University of Copenhagen
University of Bergen, 2020
w/ Alexis Arnaudon, Darryl Holm, Sarang Joshi, Tom Fletcher, Frank v.d. Meulen, Moritz Schauer, Benjamin Eltzner, Line Kuhnel, Mathias H. Jensen, Pernille E.H. Hansen
Novo nordisk foundation
Villum foundation
Carlsberg foundation
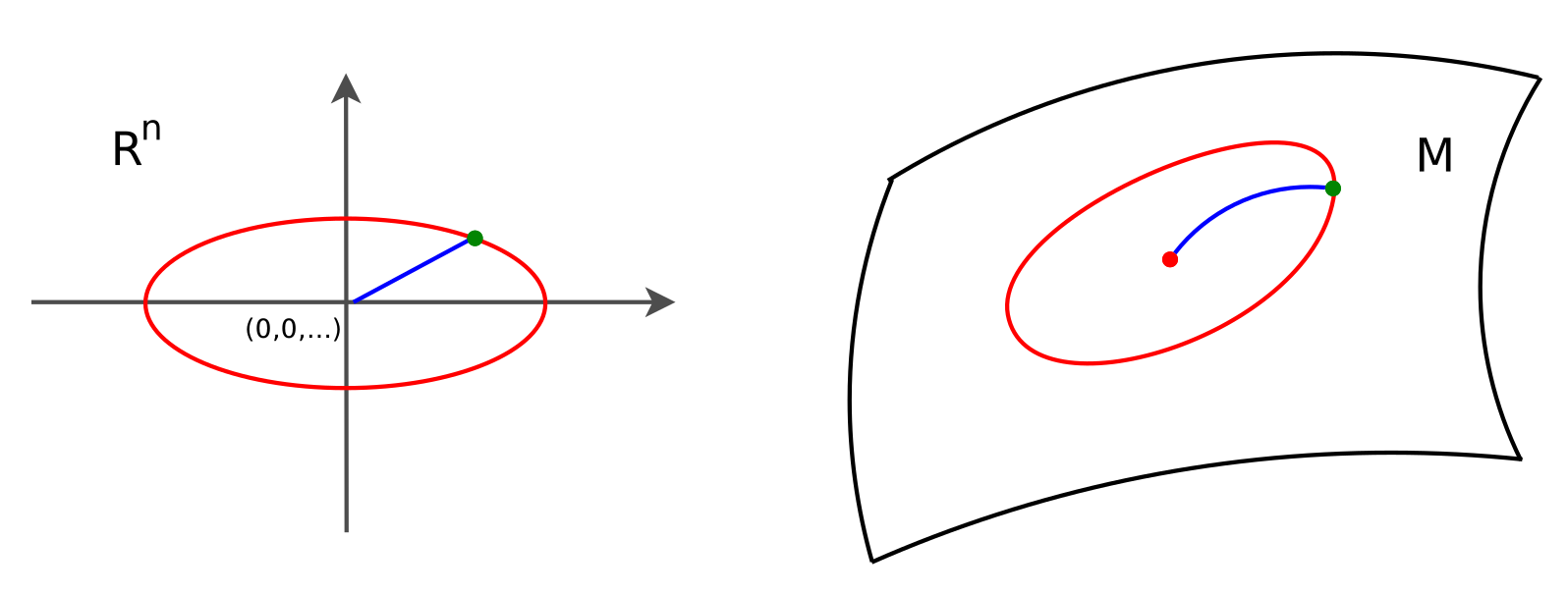
Generalization of Euclidean statistical notions and techniques to spaces without vector space structure
The Fréchet mean is not an expected value.
There is no equivalence between different characterizations of means
- in contrast to Euclidean statistics
Plane directions: \(\mathbb{S}^1\)
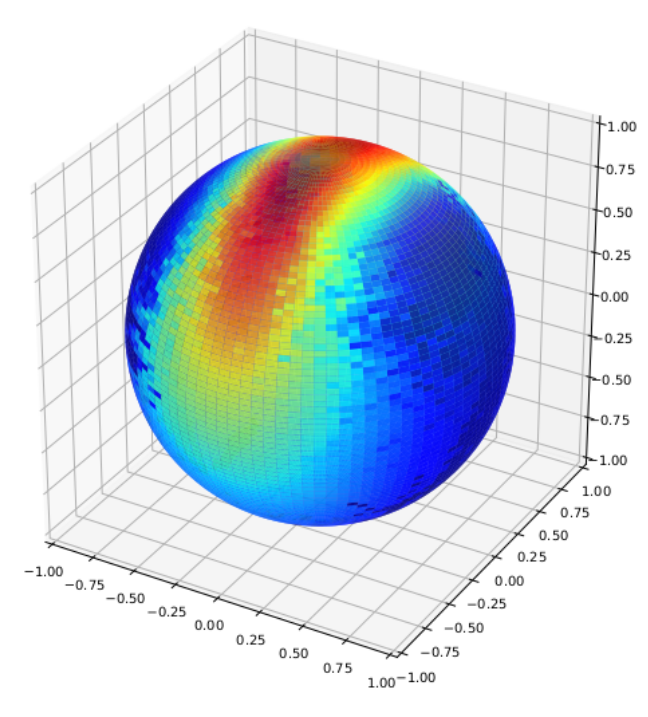
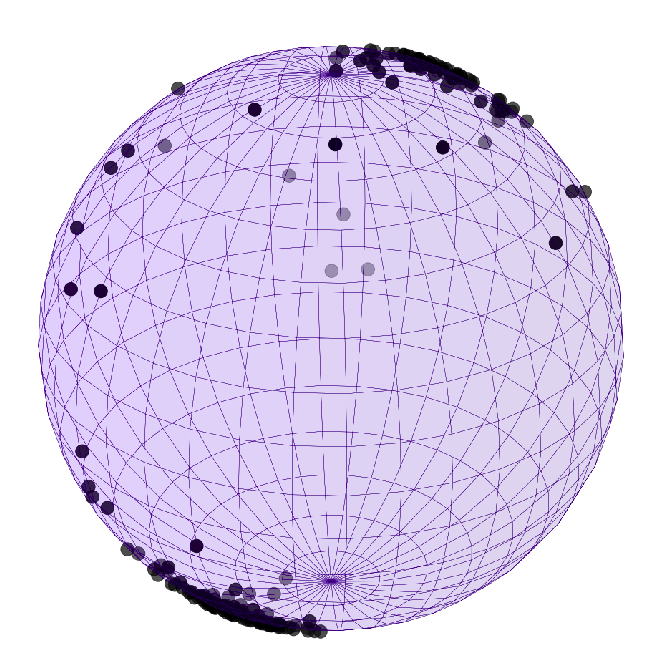
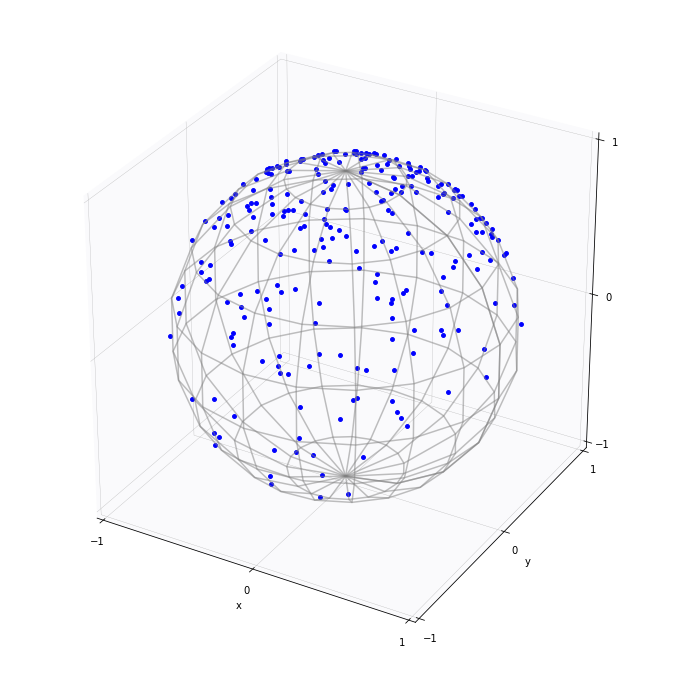
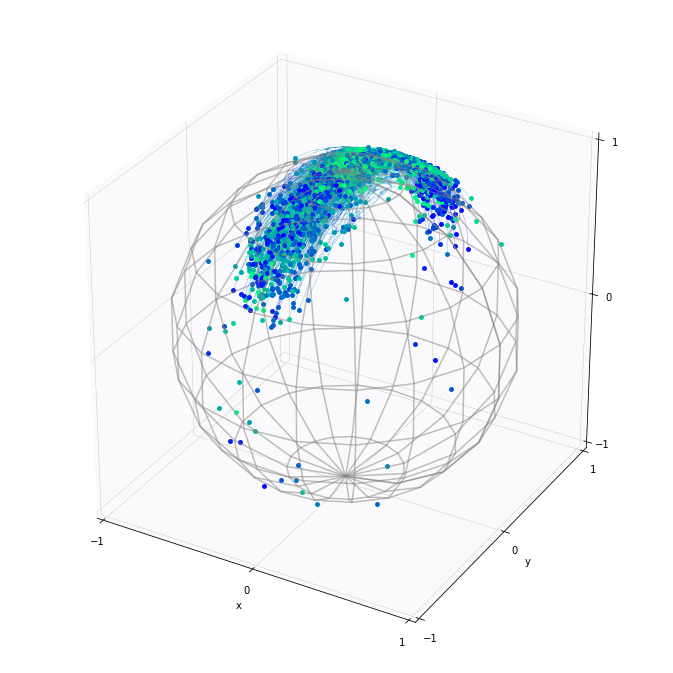
Geographical data: \(\mathbb{S}^2\)
3D directions: \(\mathrm{SO}(3), \mathbb{S}^2\)
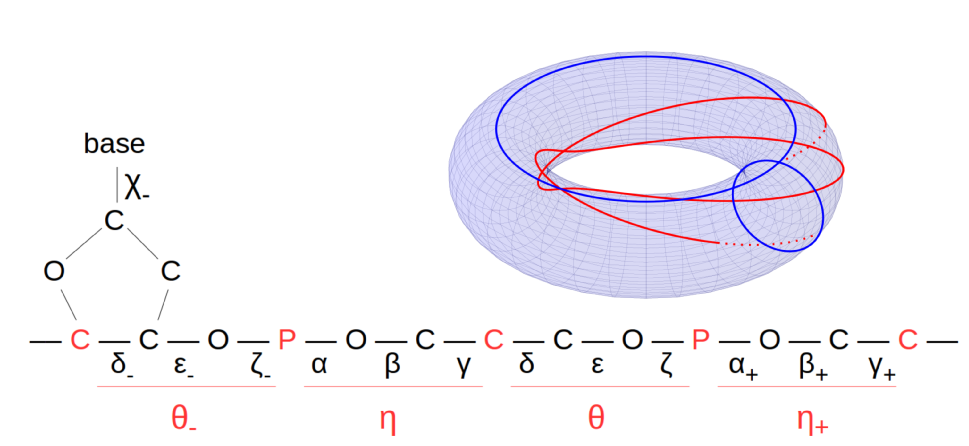
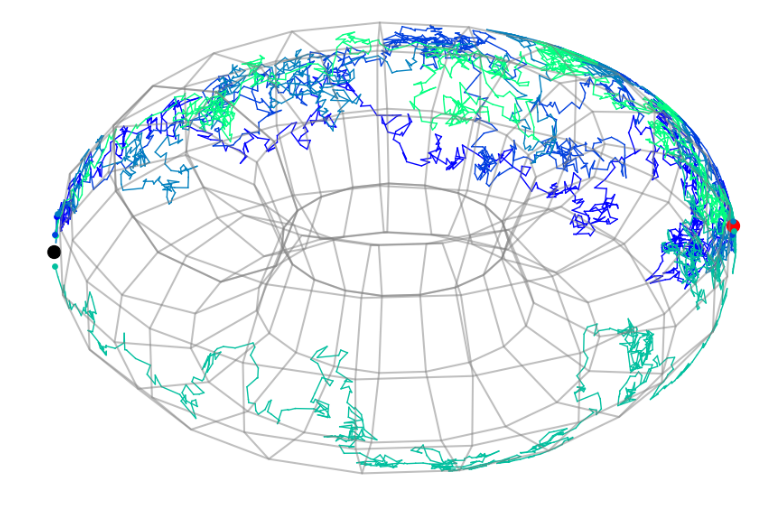
Angles: \(\mathbb{T}^N\)
Positive, symmetric 3 tensors: SPD(3)
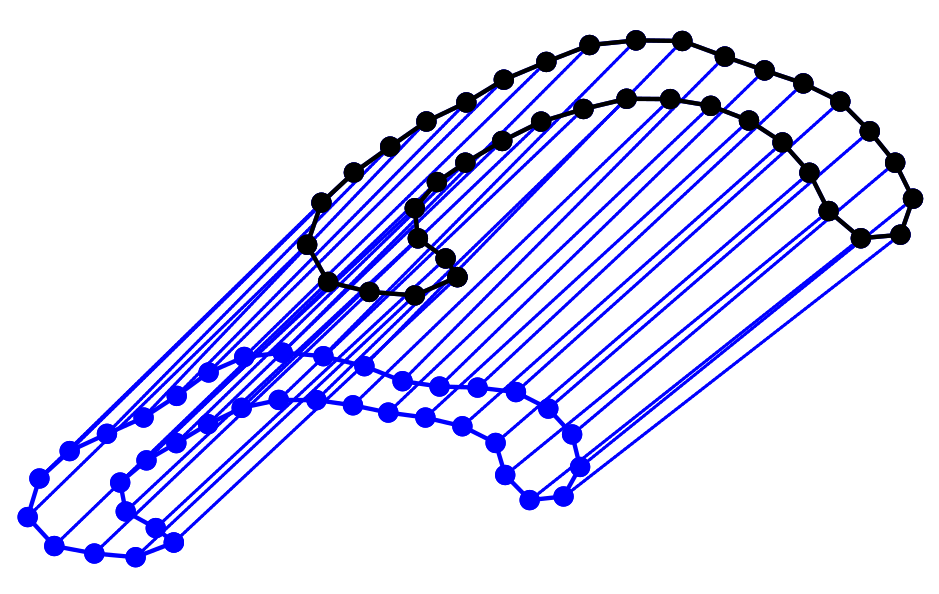
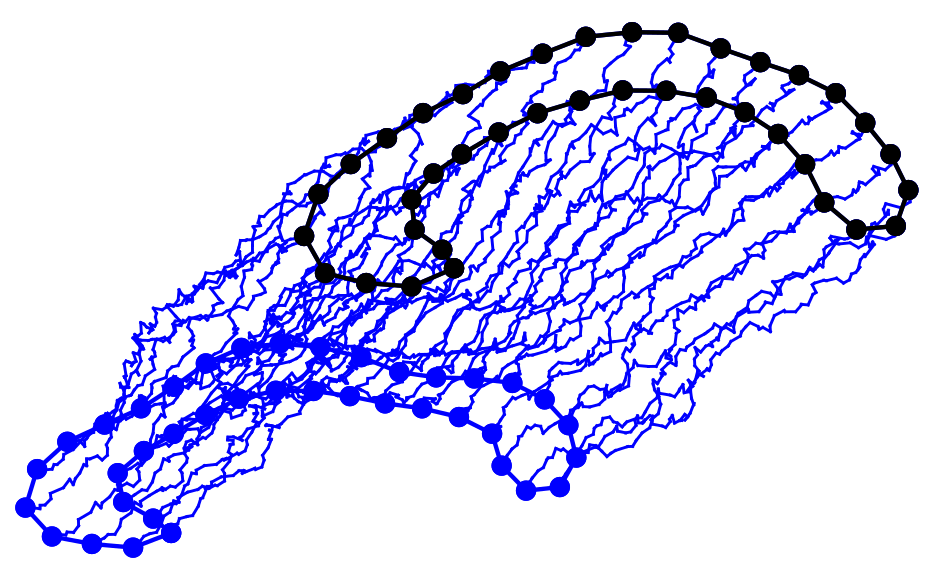
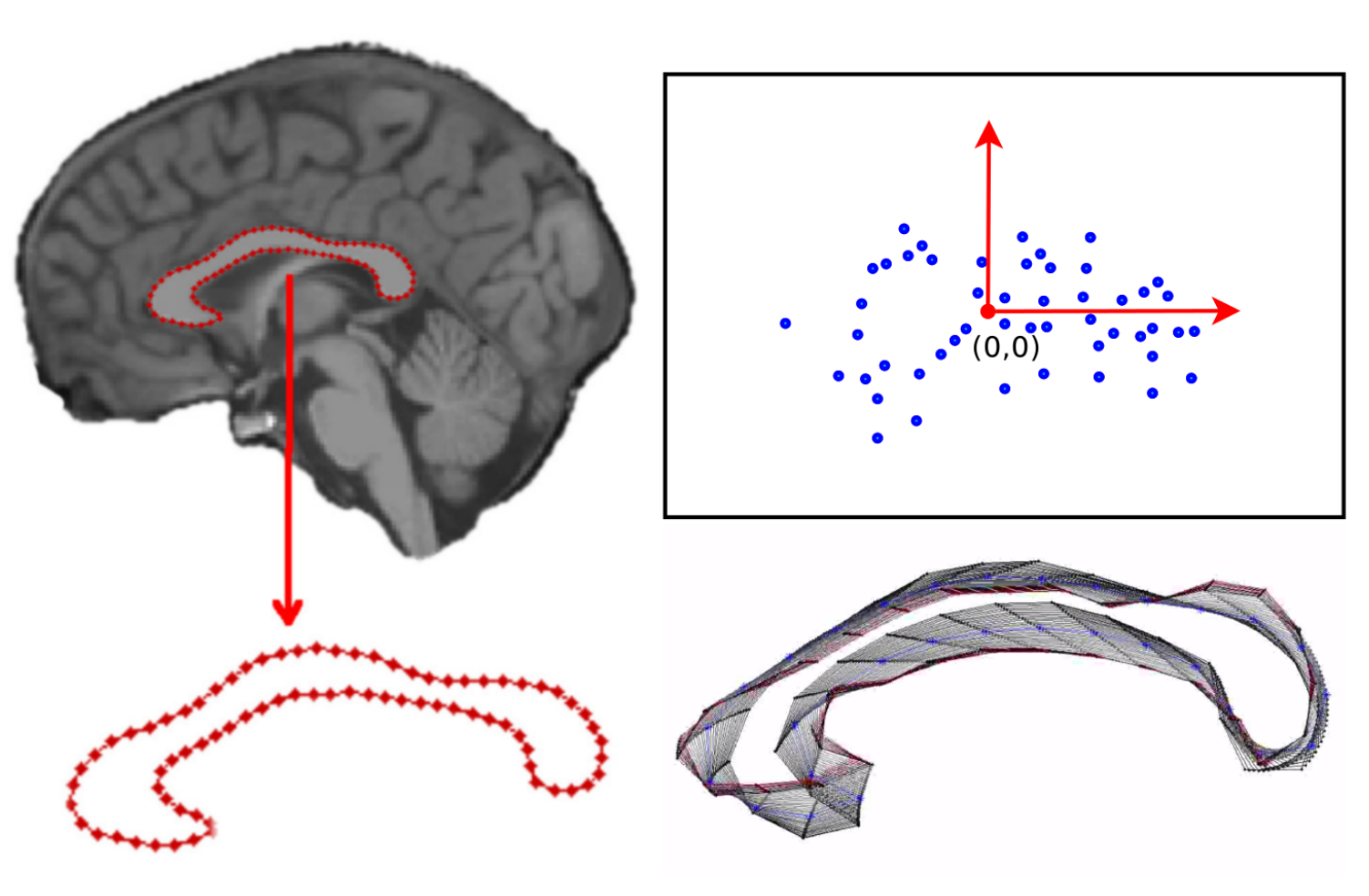
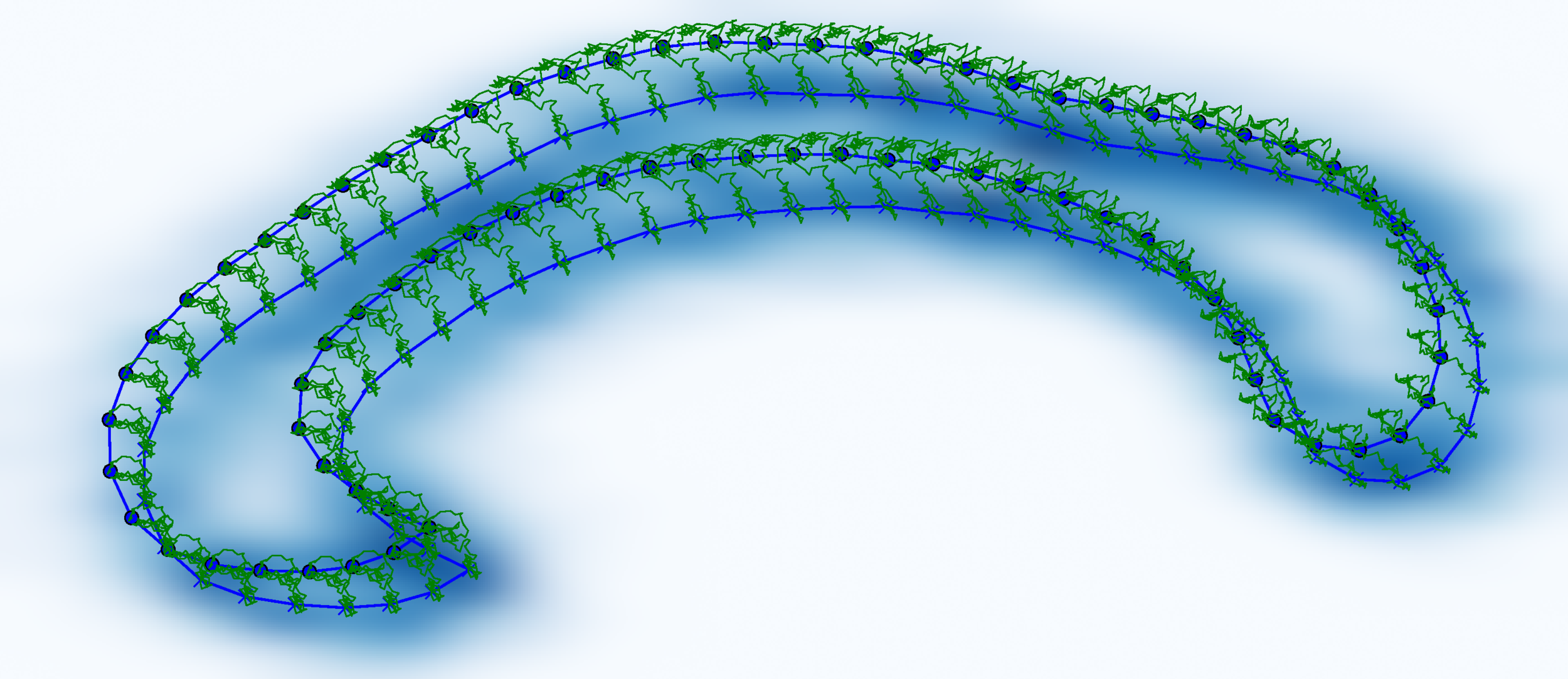
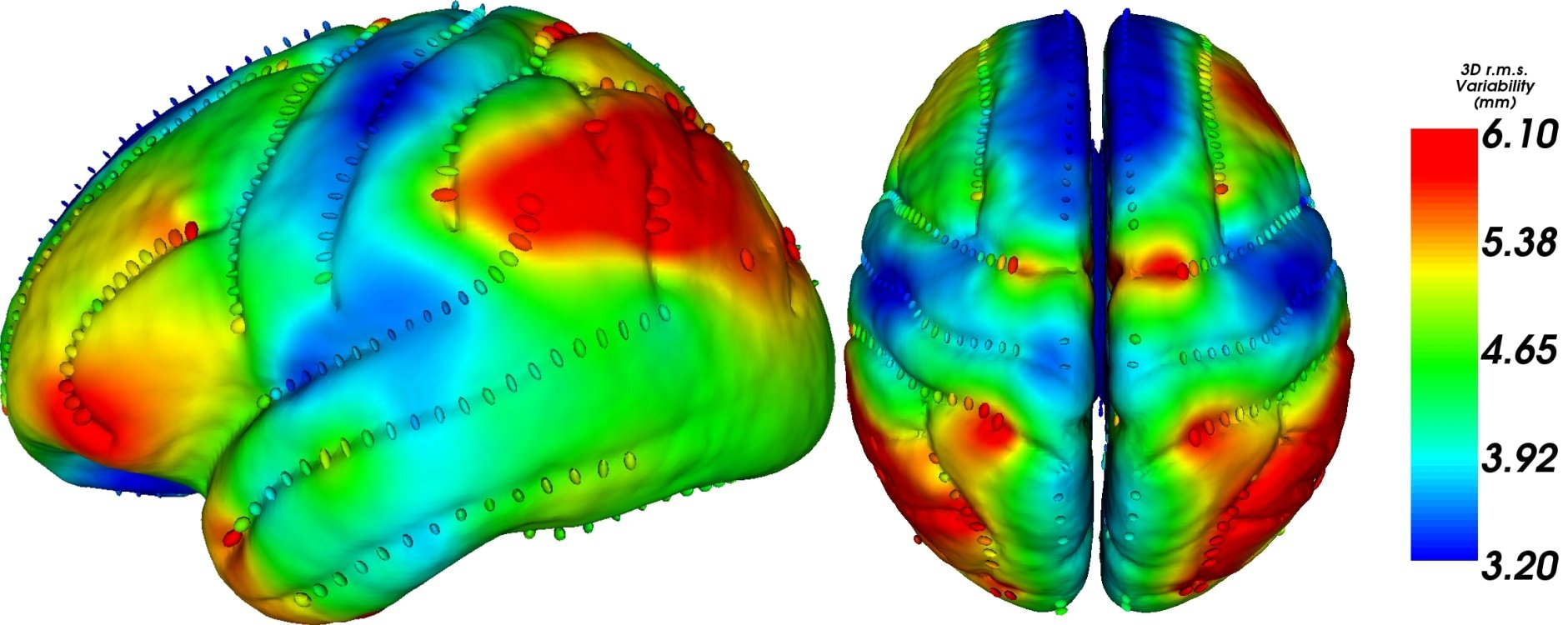
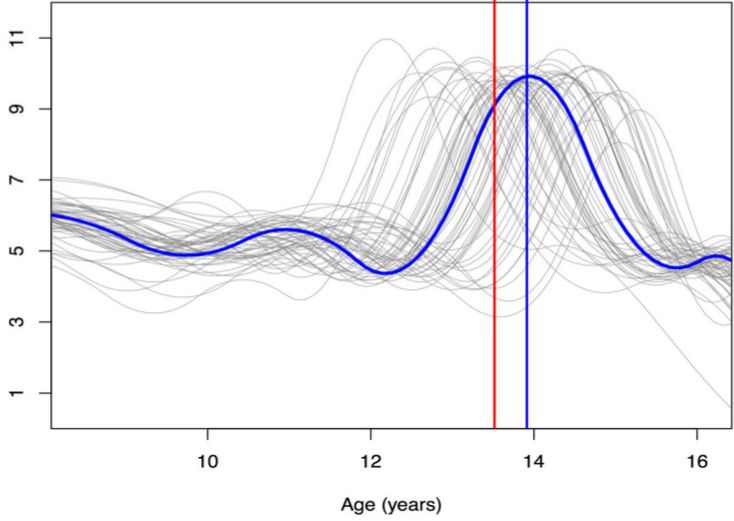
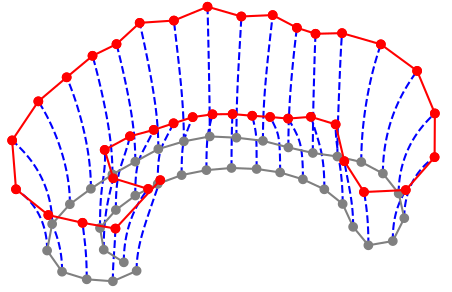
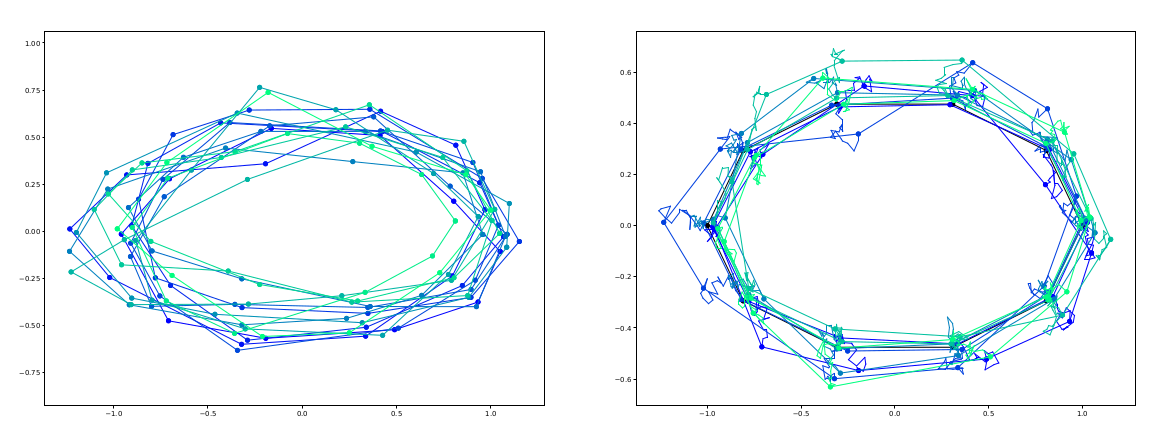
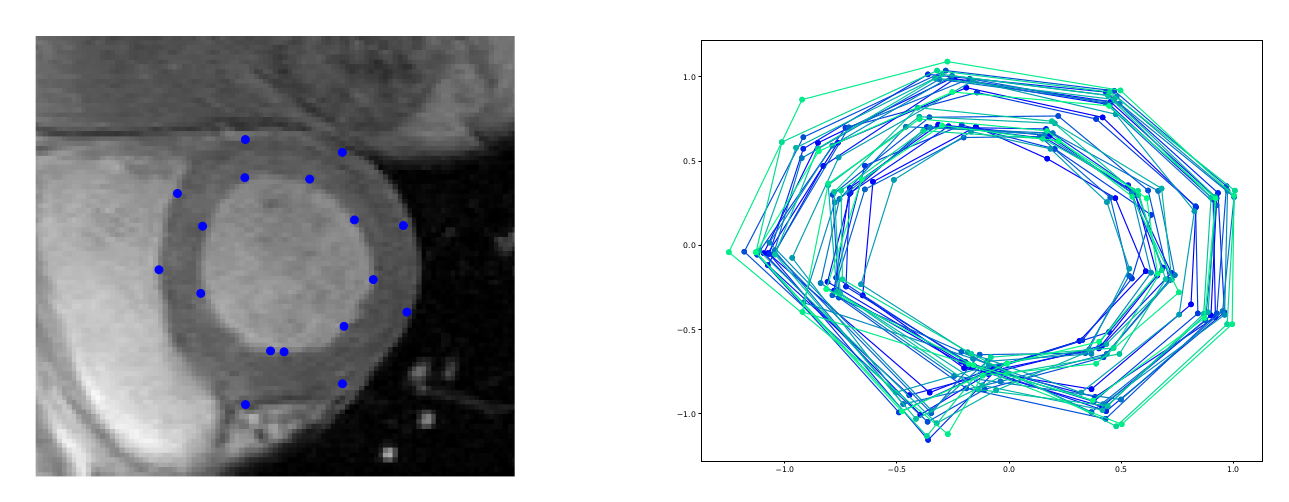
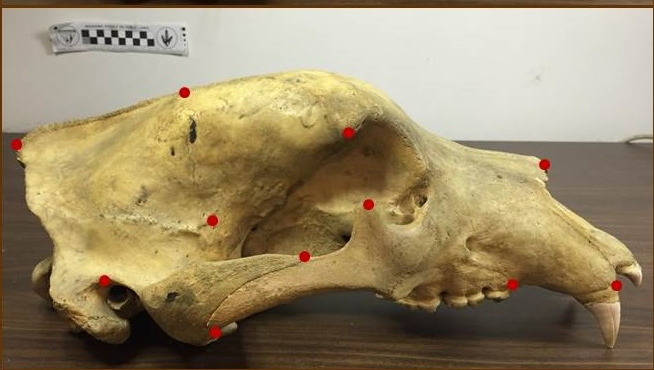
continuous curves: \(\mathrm{Emb}(\mathbb S^1,\mathbb R^2)/\mathrm{Diff}(\mathbb S^1) \)
Mieritz et al.,JCEM'15
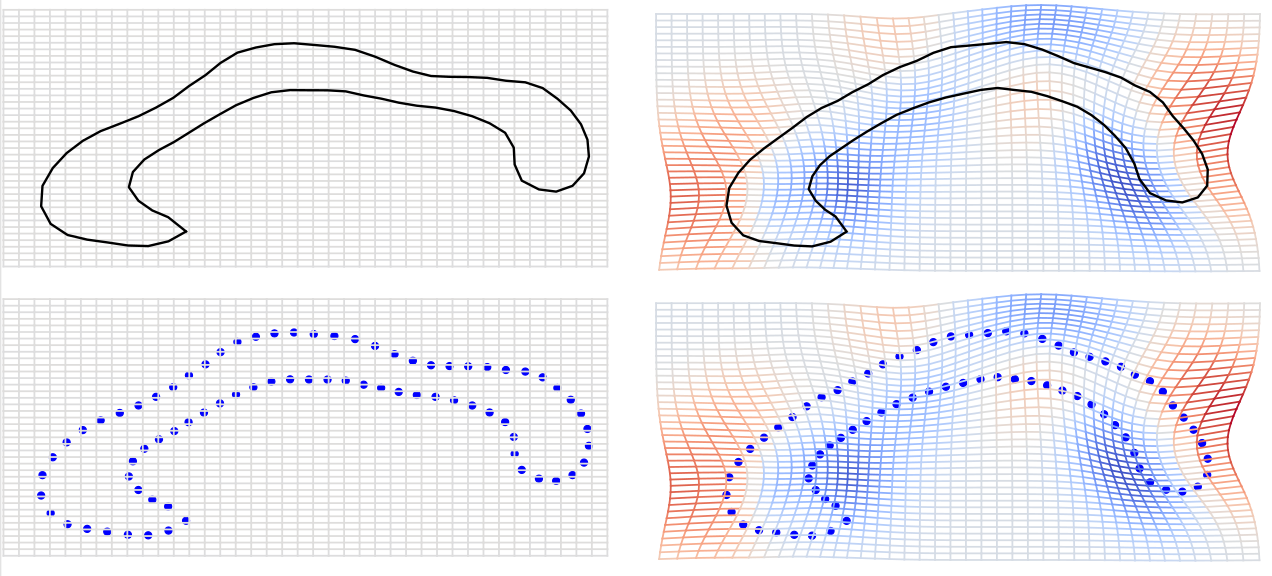
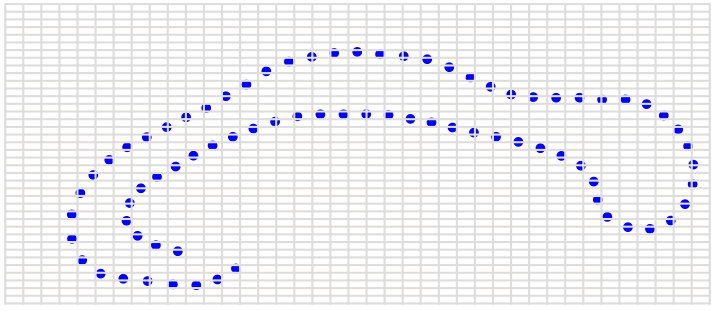
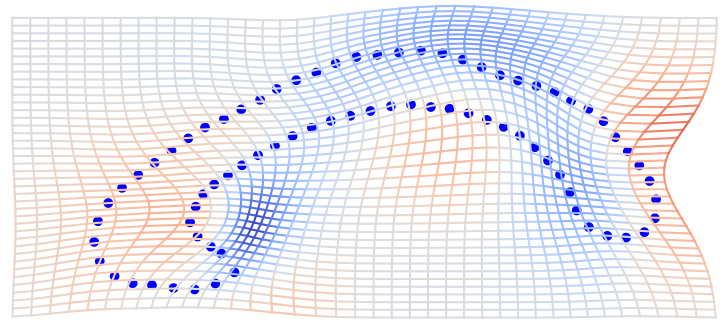
\( \phi\in\mathrm{Diff}(\Omega) \) diffeomorphism of domain \(\Omega\)
action: \(\phi.s=\phi\circ s\) (shapes)
\(\phi.s=s\circ\phi^{-1}\) (images)
\( \phi \)
\( \phi_t:[0,T]\to\mathrm{Diff}(\Omega) \) path of diffeomorphisms (parameter t)
LDDMM: Grenander, Miller, Trouve, Younes, Christensen, Joshi, et al.
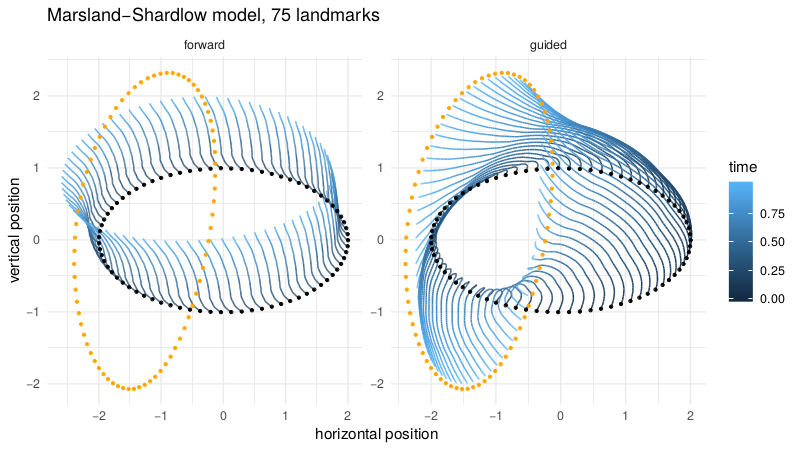
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
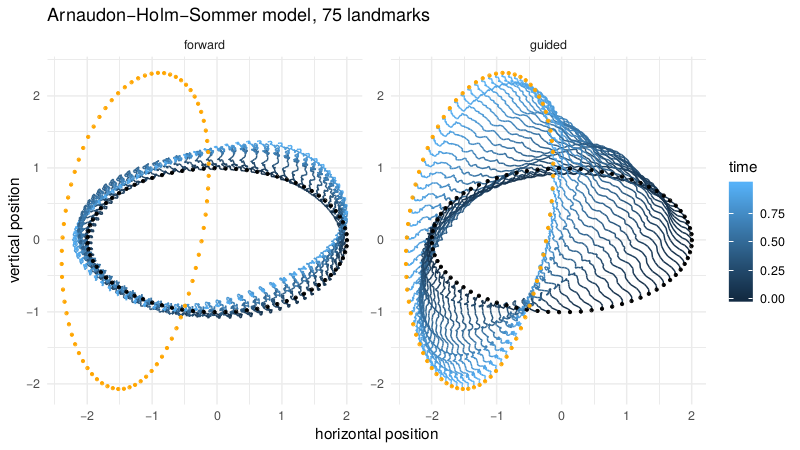
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Deterministic:
Stochastic:
Sommer,Arnaudon,Kuhnel,Josh,MFCA'17
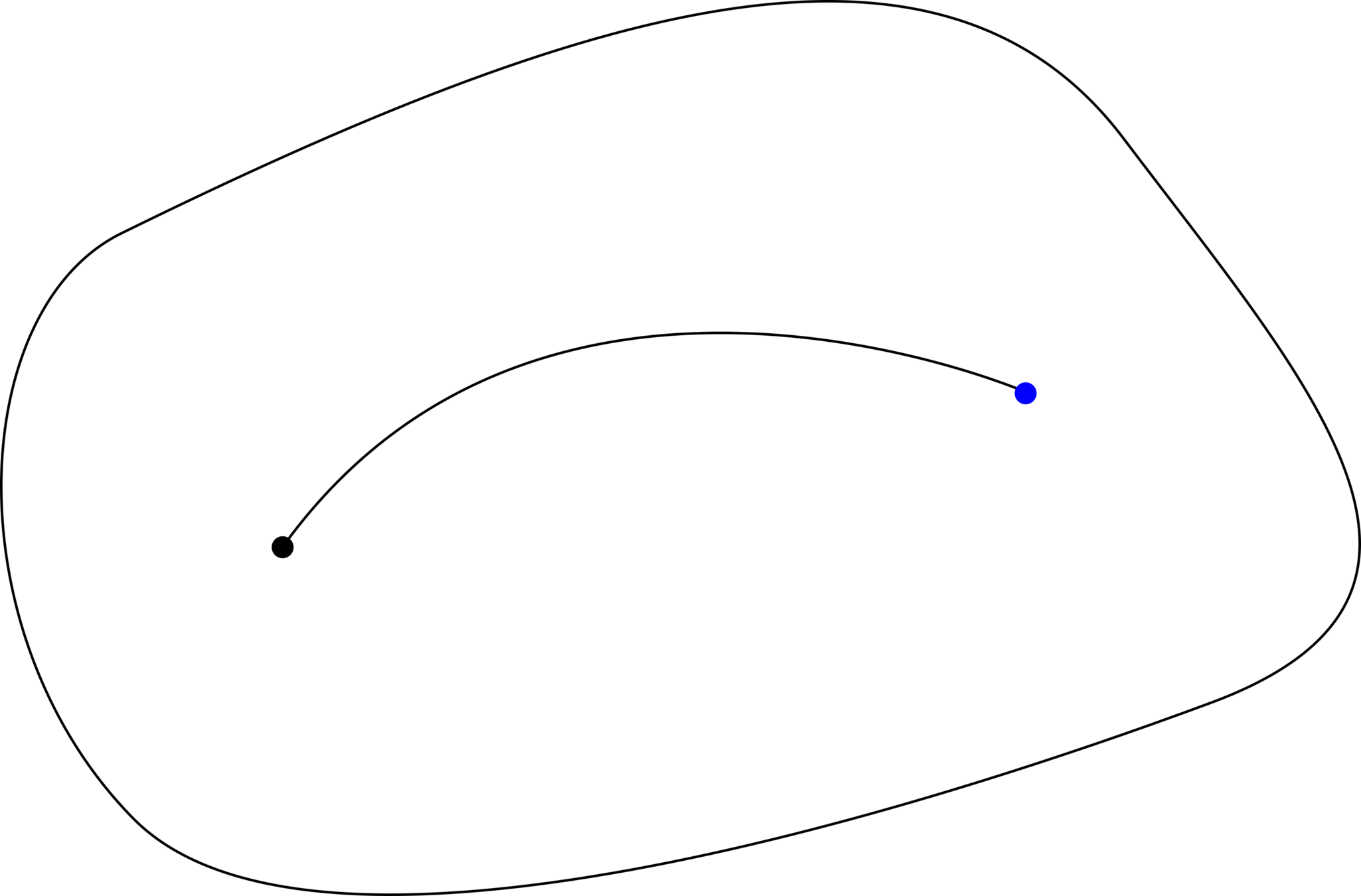
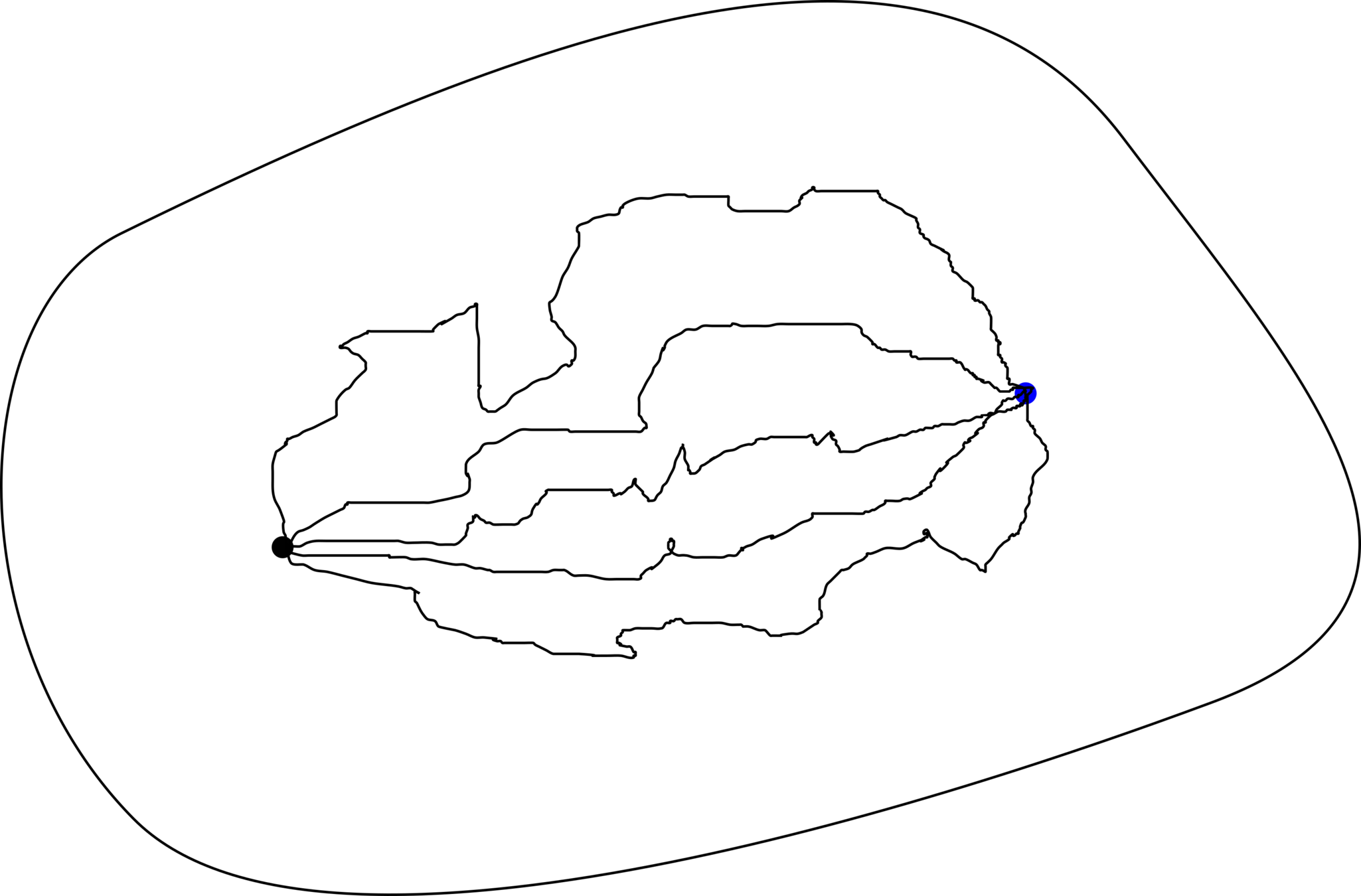
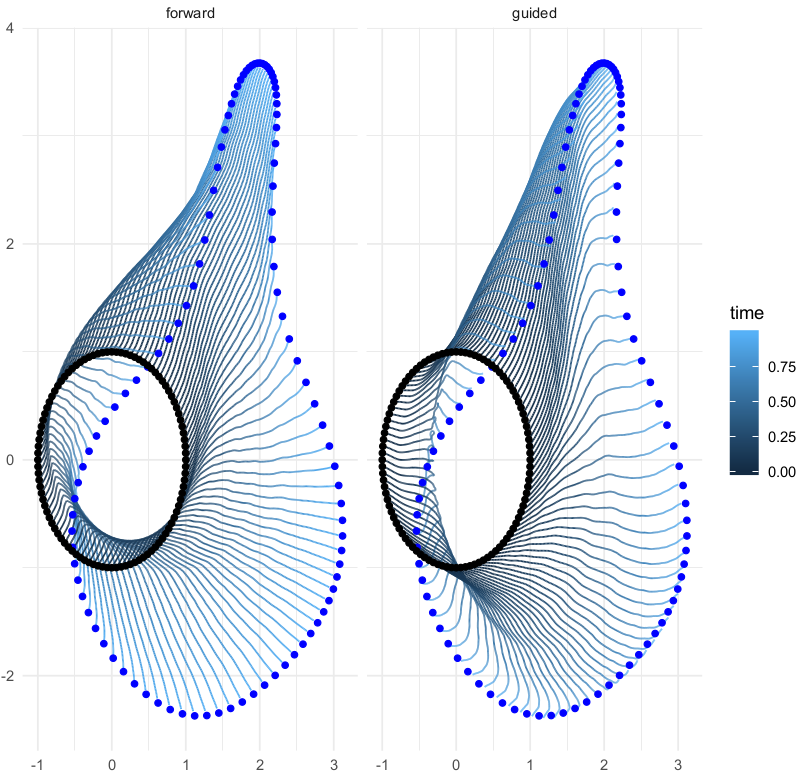
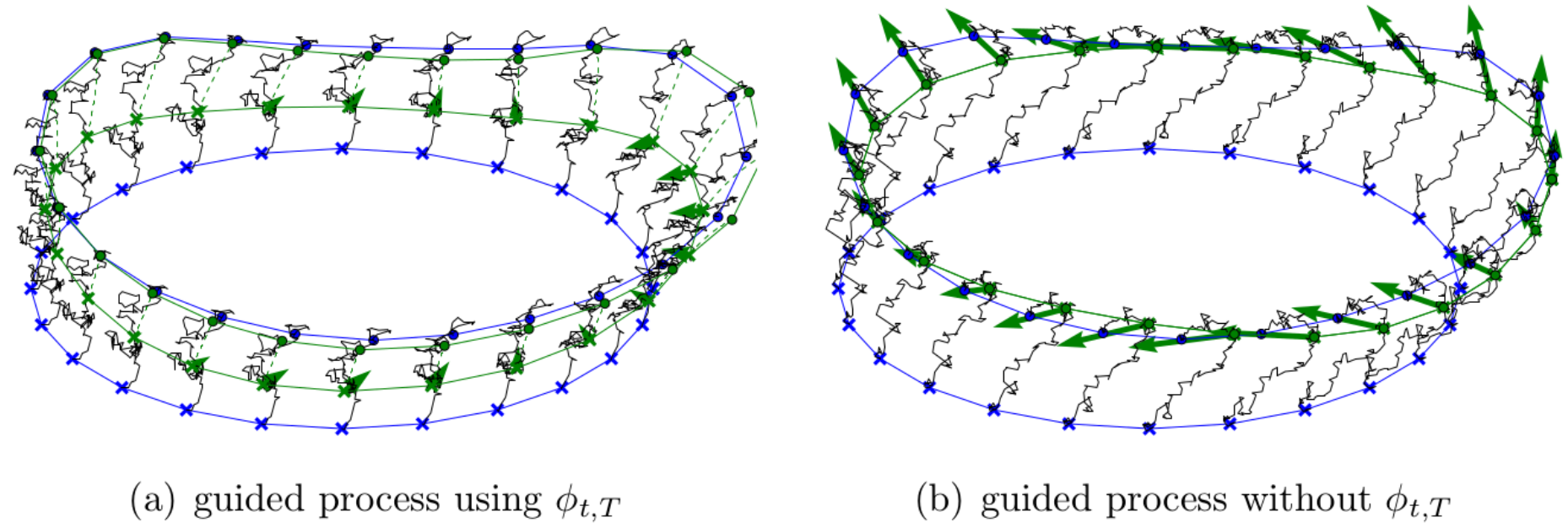
geometric bridge sampling
Delyon/Hu 2006 + v.d. Meulen, Schauer:
\(\sigma\) invertible:
\(v\)
\(x_0\)
\(x_t\)
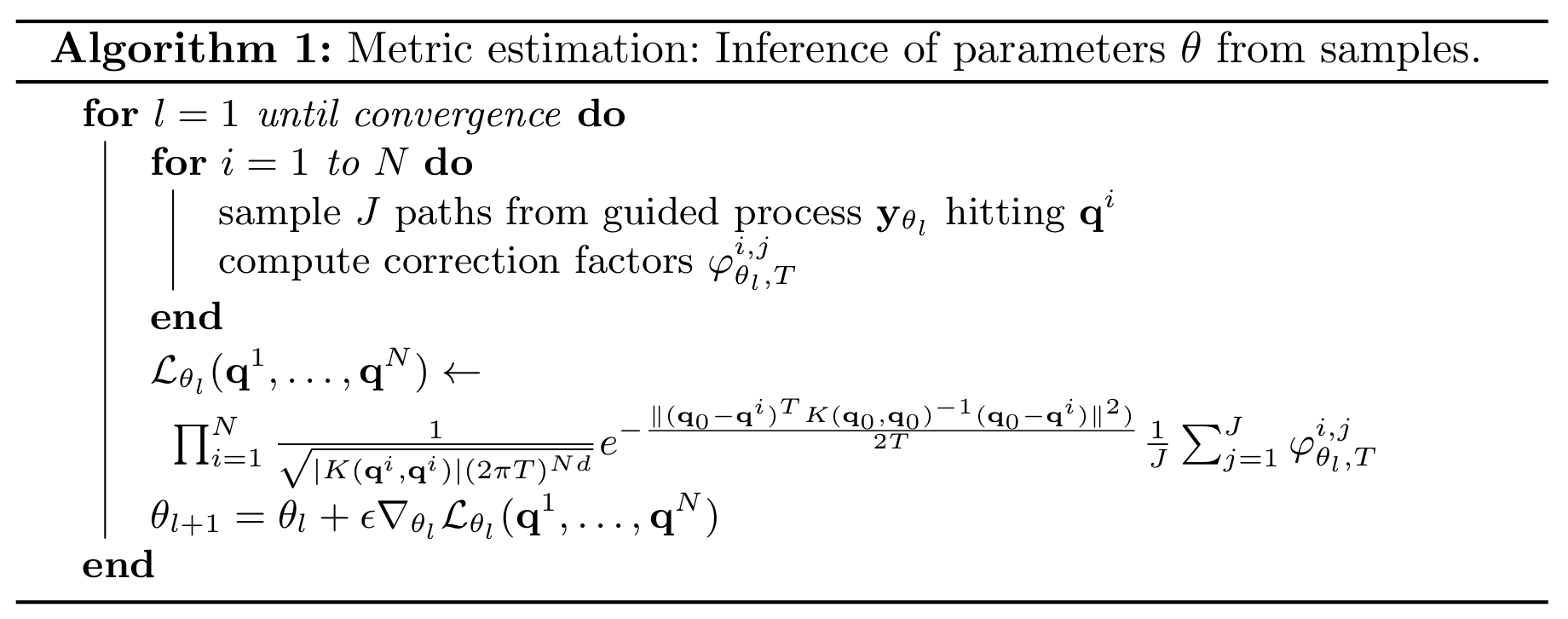
v.d. Meulen,Schauer,Arnaudon,Sommer,arxiv'20
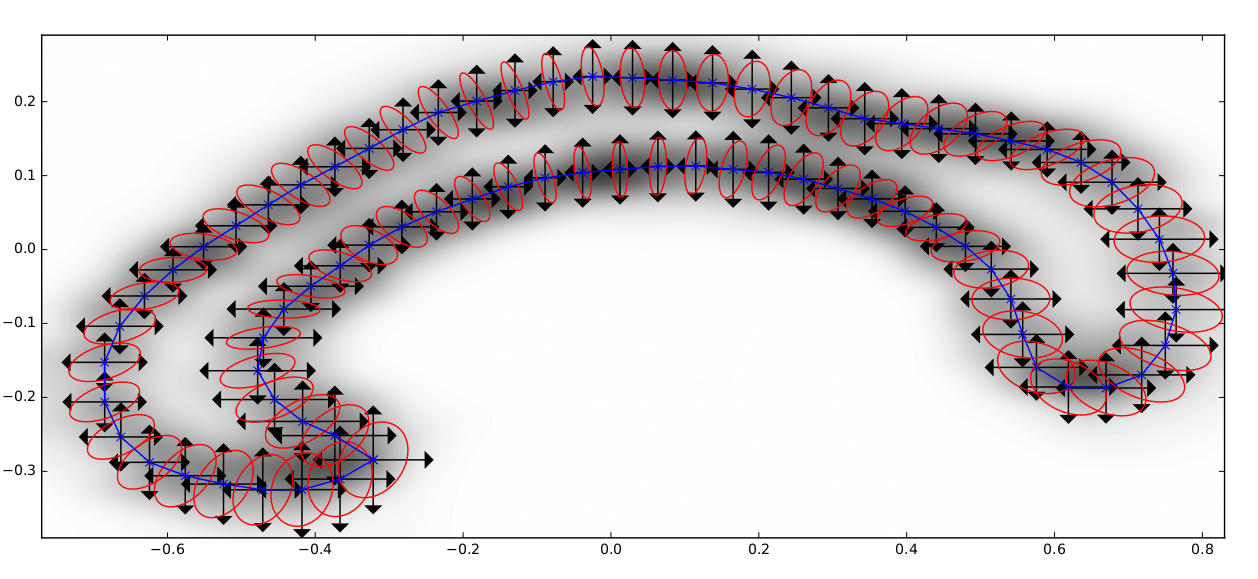
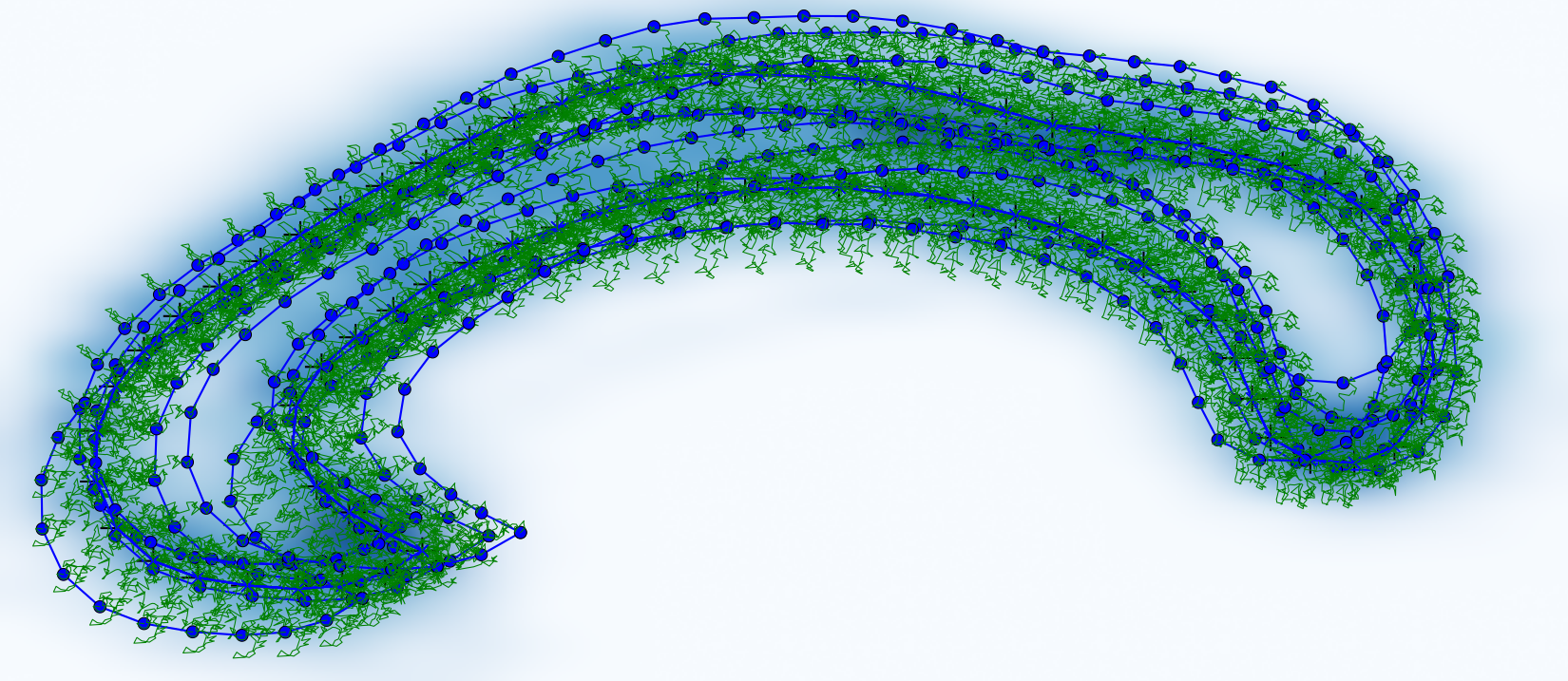
Stochastic perturbation of the reconstruction equation
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
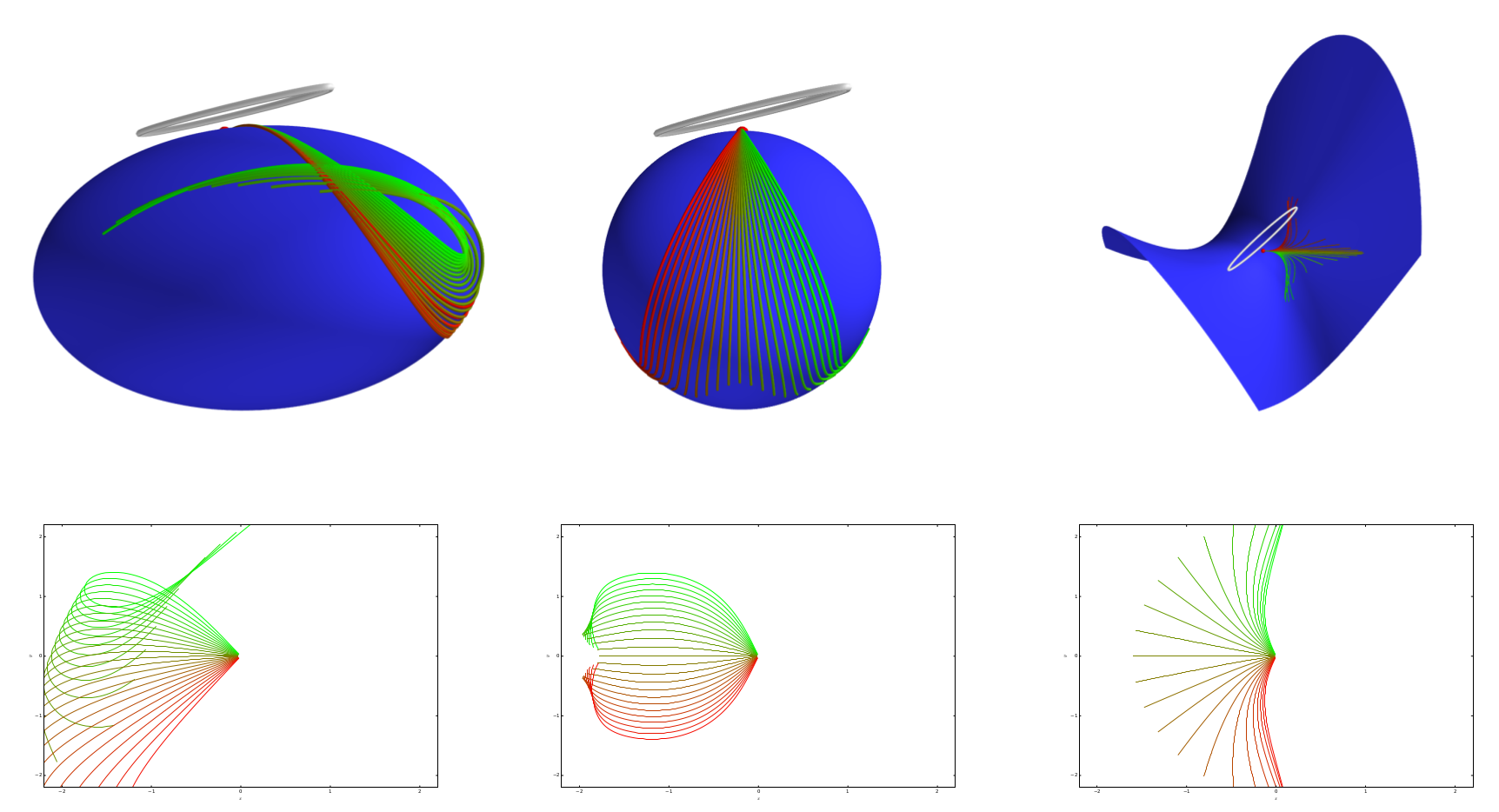
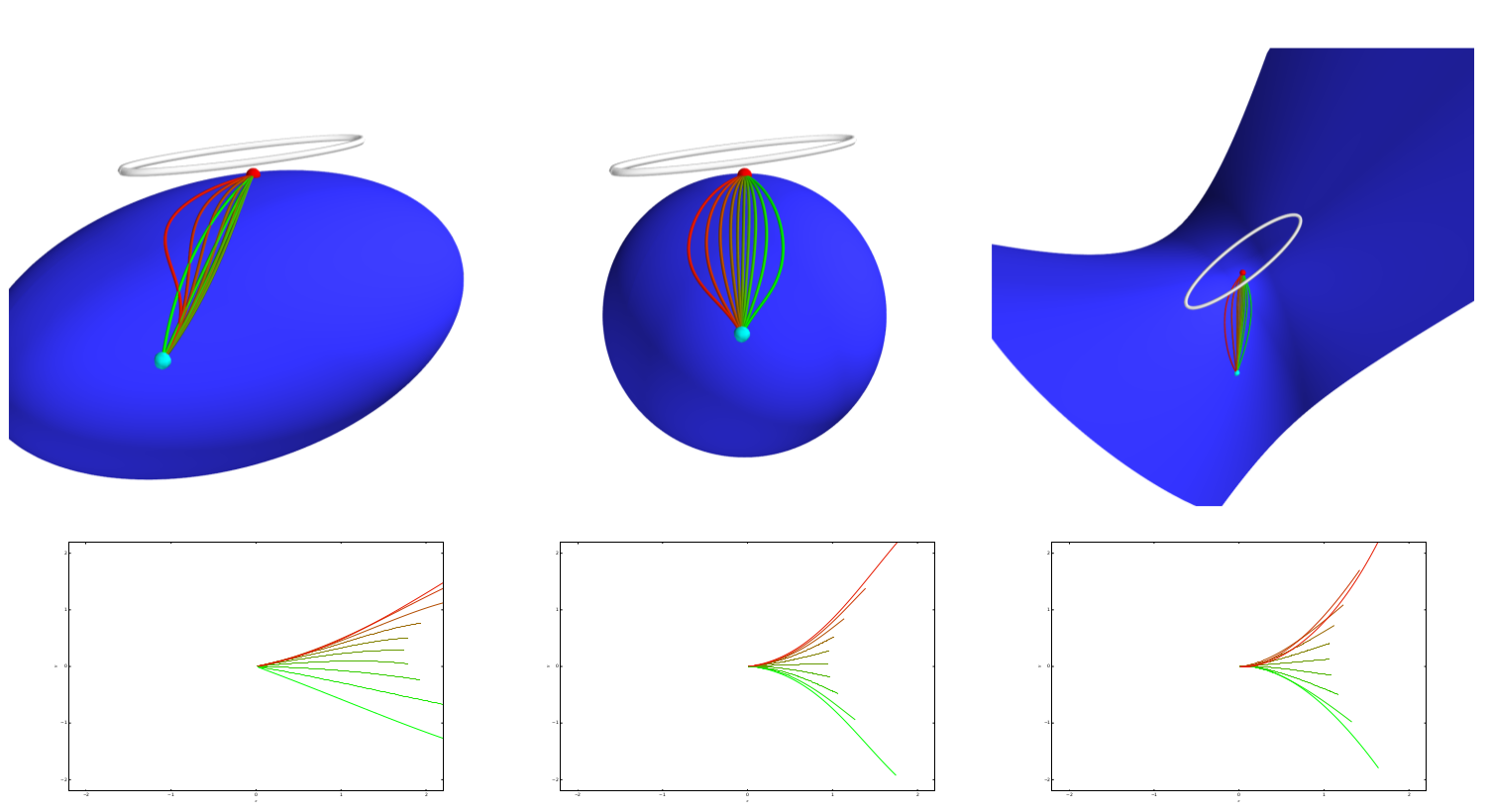
Theorem:
v.d. Meulen,Schauer,Arnaudon,Sommer,arxiv'20
Generalization of Euclidean statistical notions and techniques.
Sommer,IPMI'15; Sommer,Svane,JGM'15;
Sommer,GSI'17; Sommer,Sankhya A'19
The Fréchet mean is not an expected value.
There is no equivalence between different characterizations of means
- in contrast to Euclidean statistics
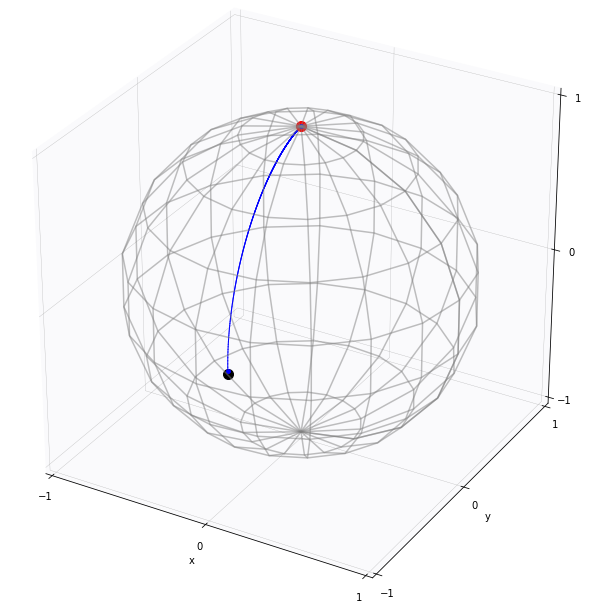
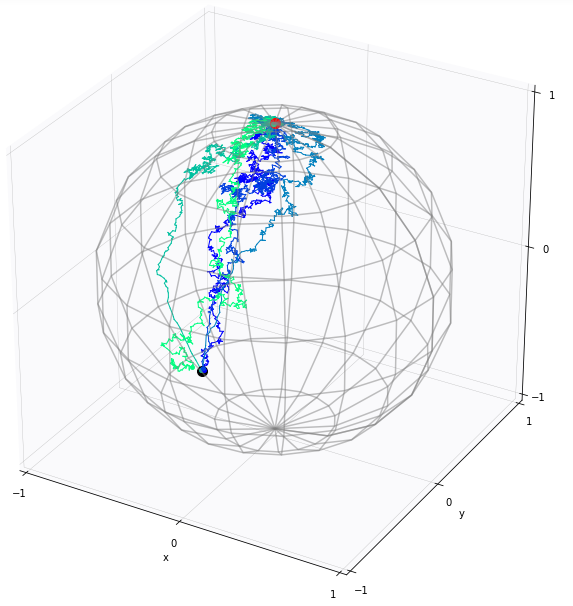
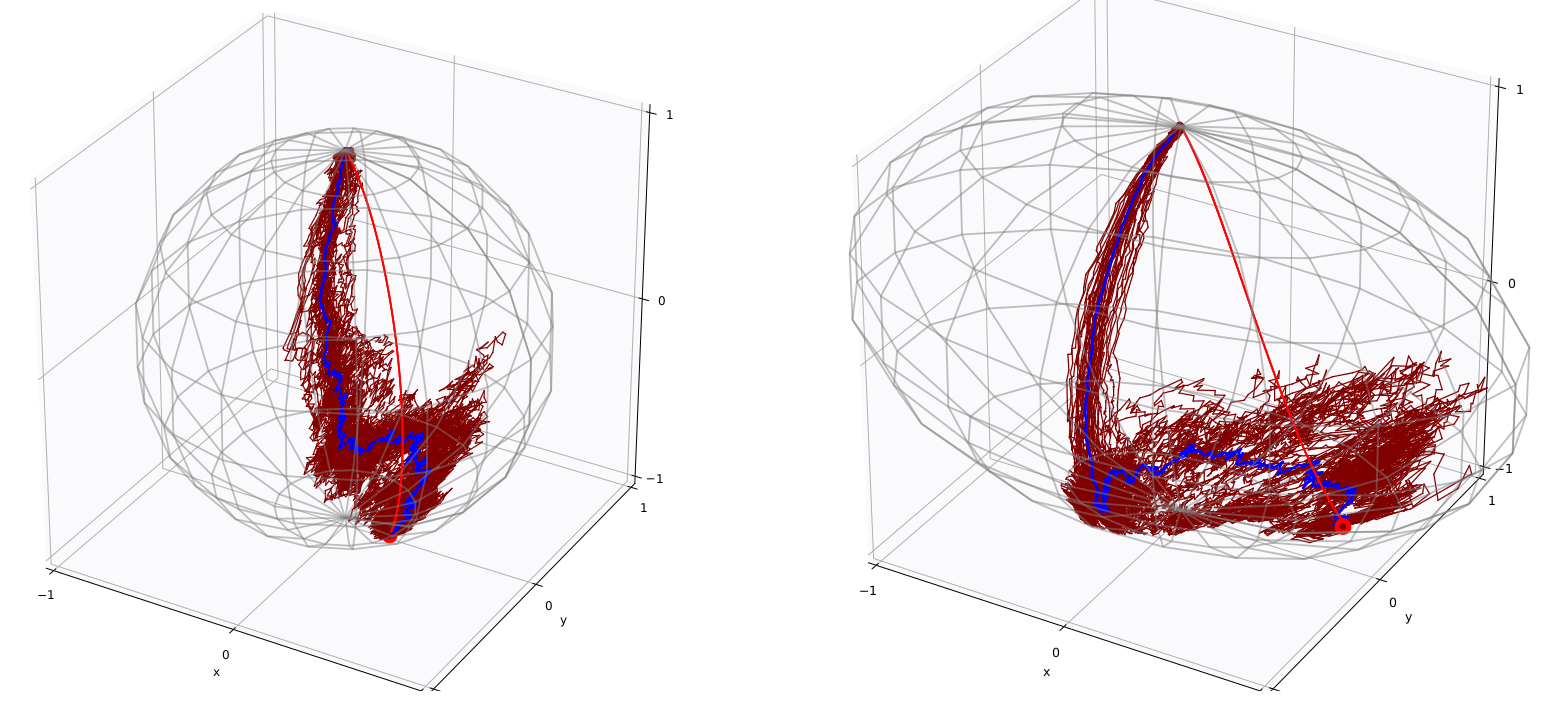
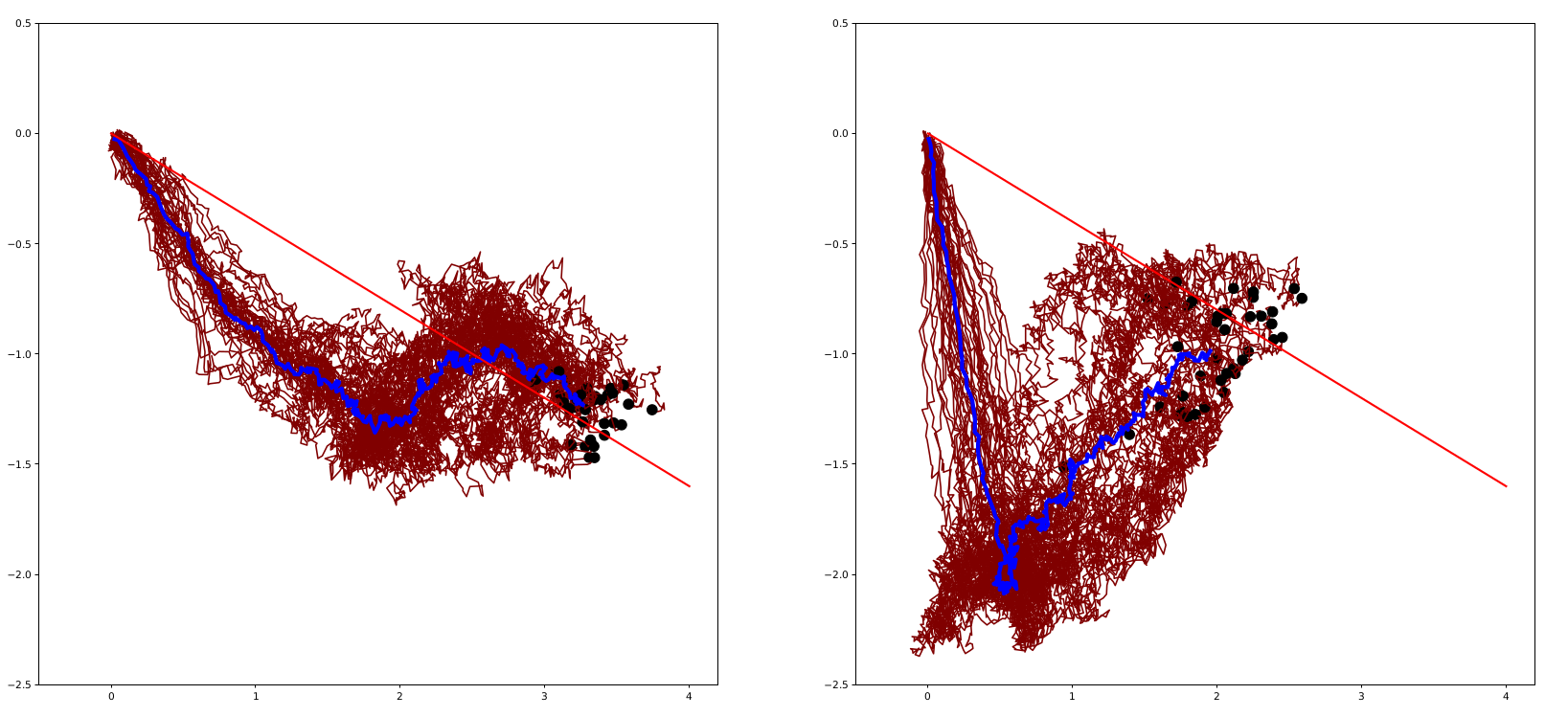
Brownian motion starting point
Højgaard,Sommer,in preparation
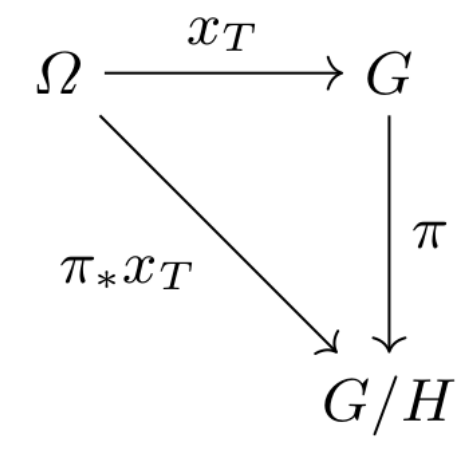
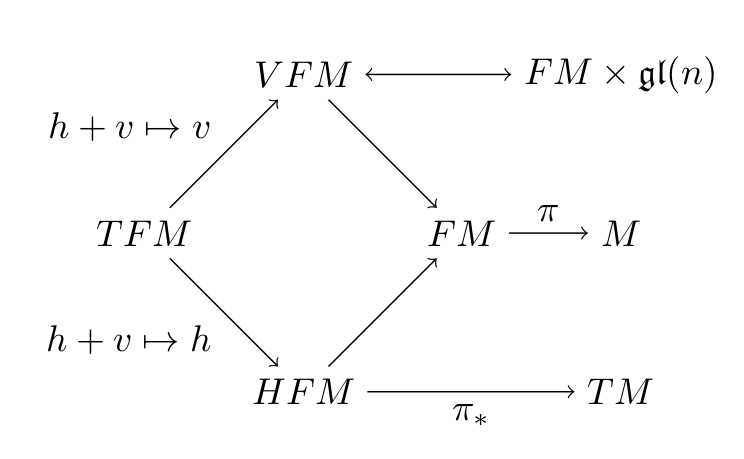
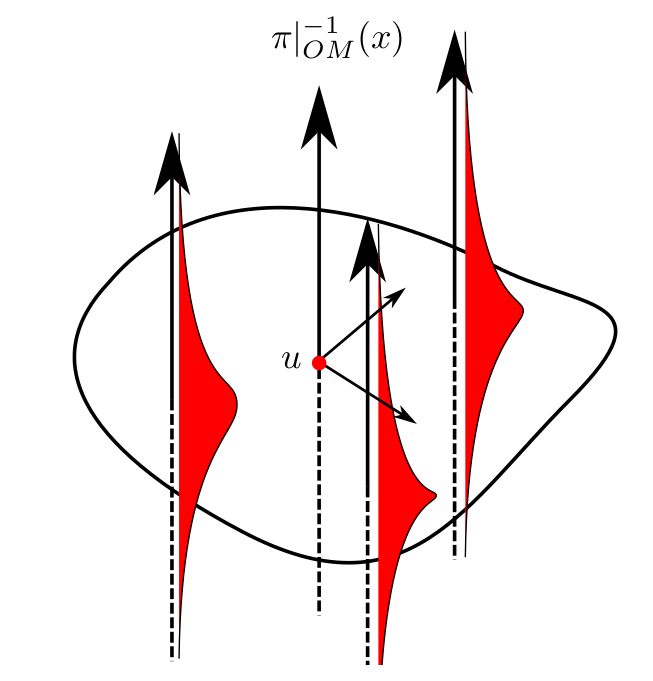
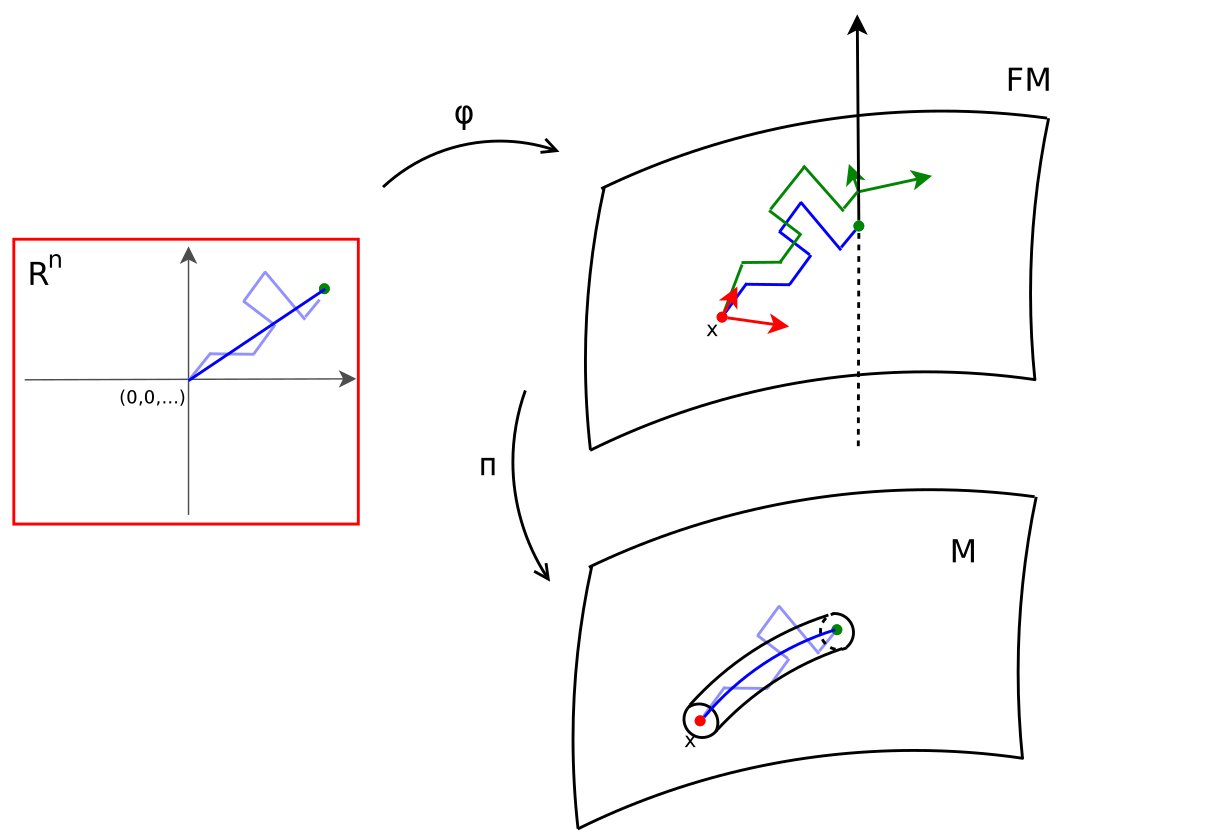
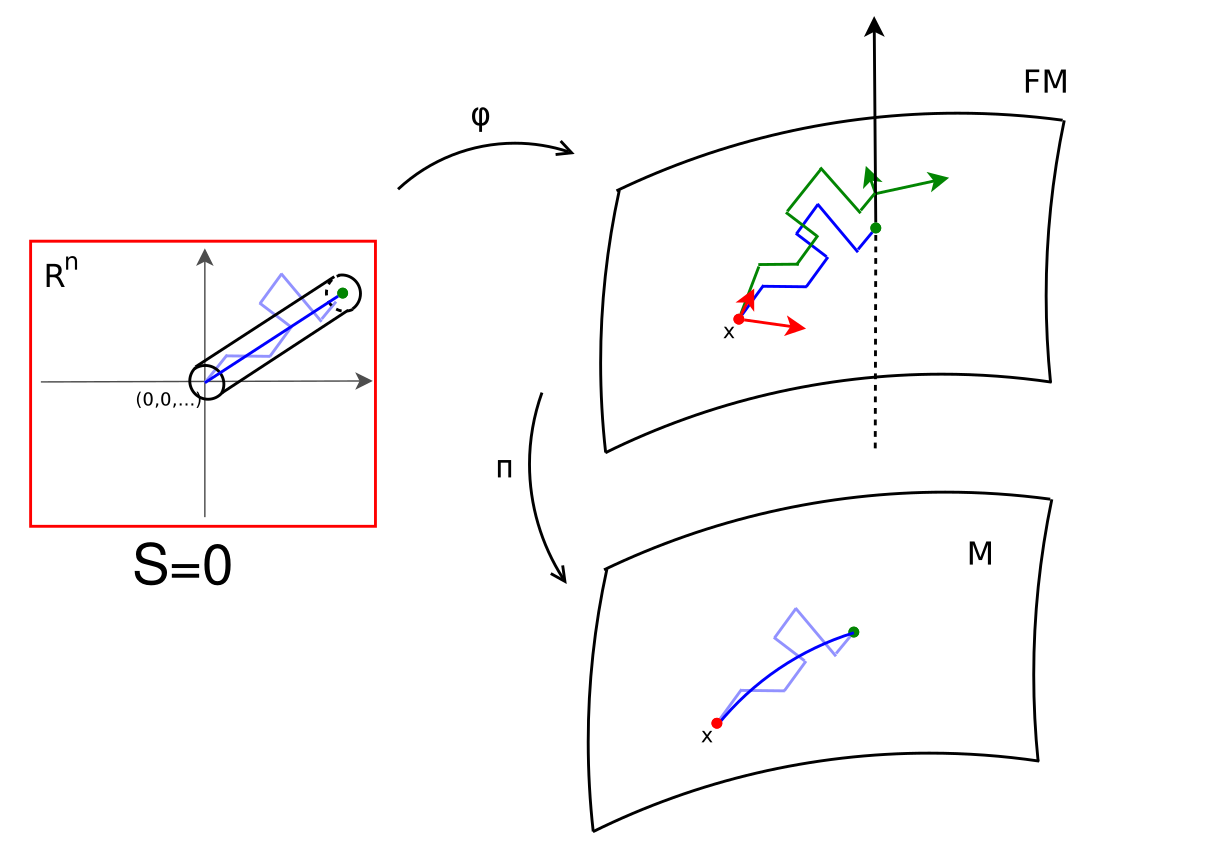
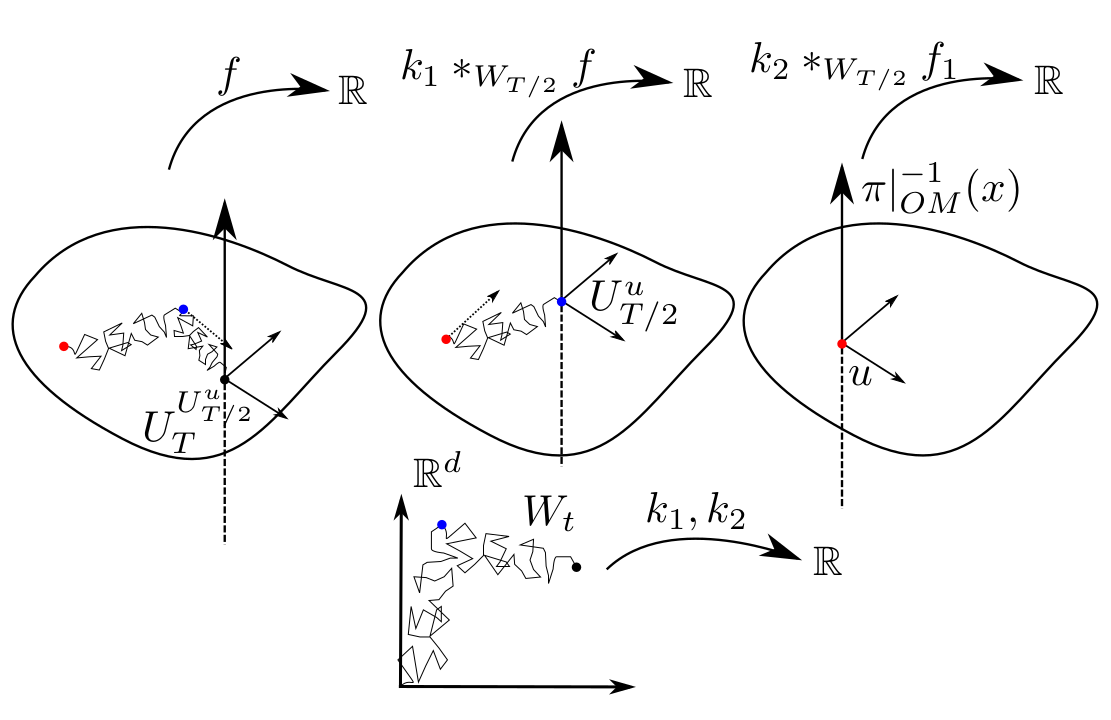
\(\pi\)
Sommer,Joshi,Højgaard, in preparation
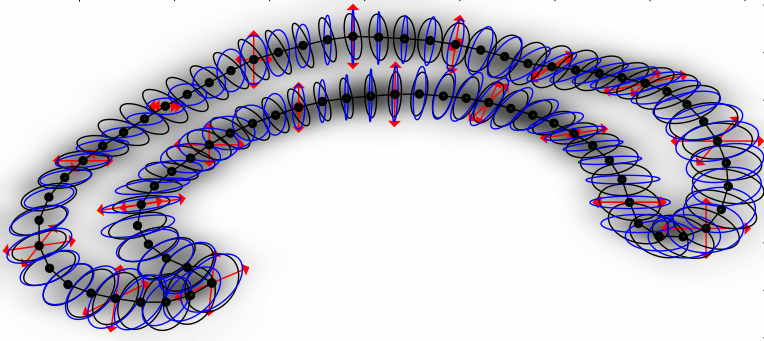
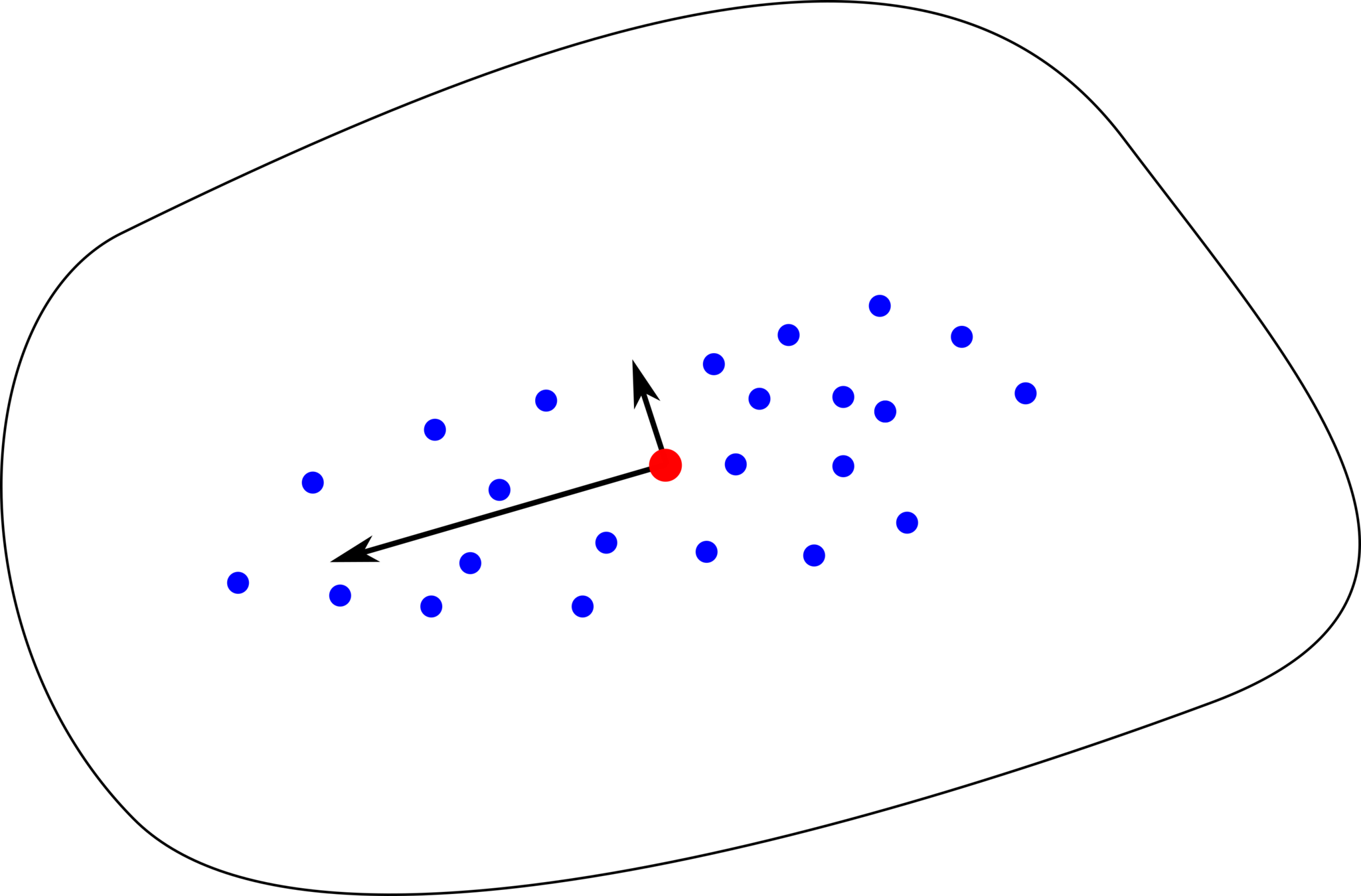
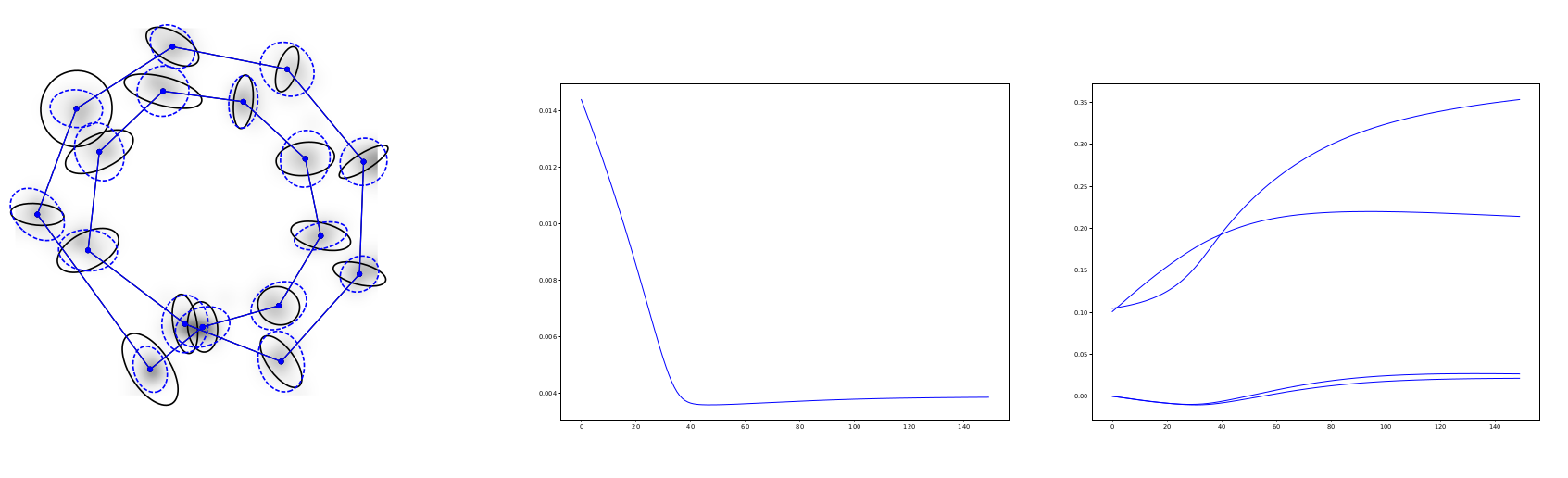
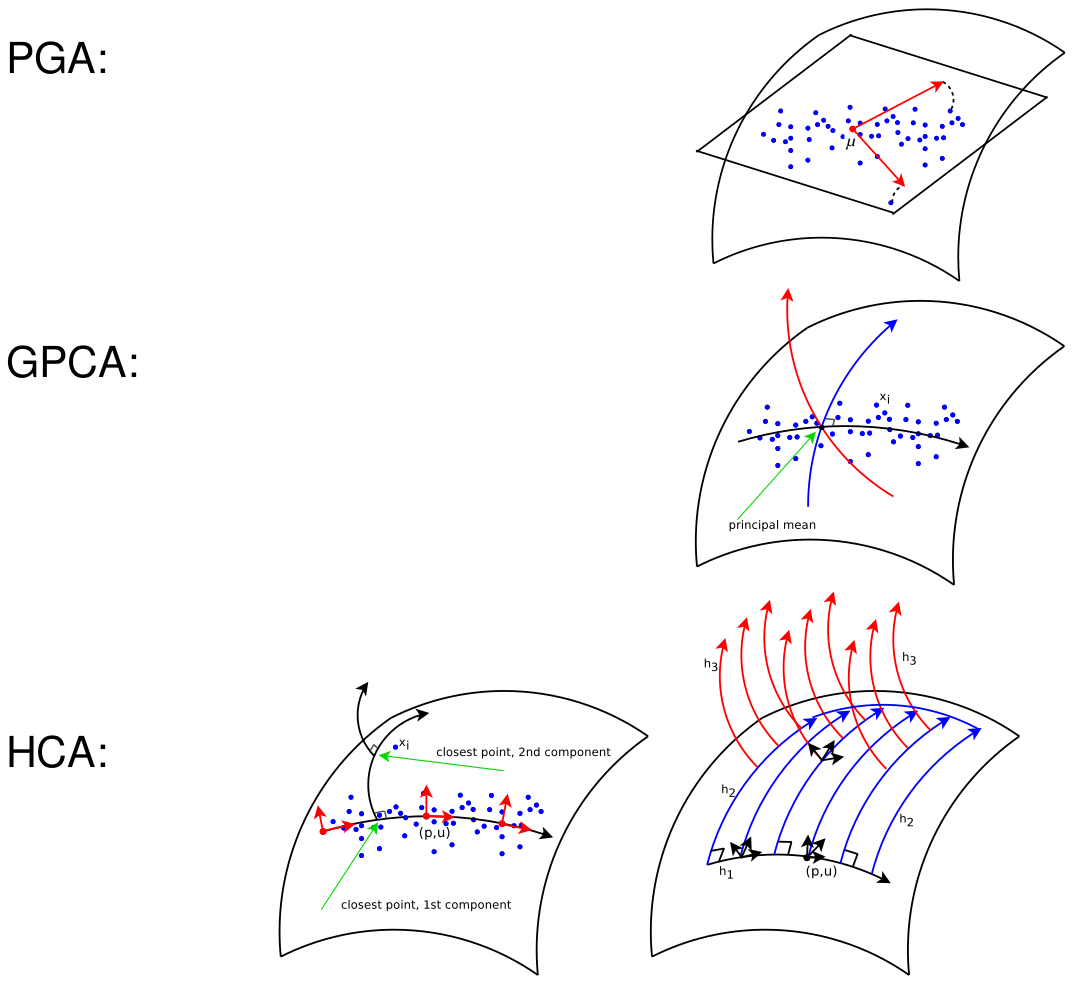
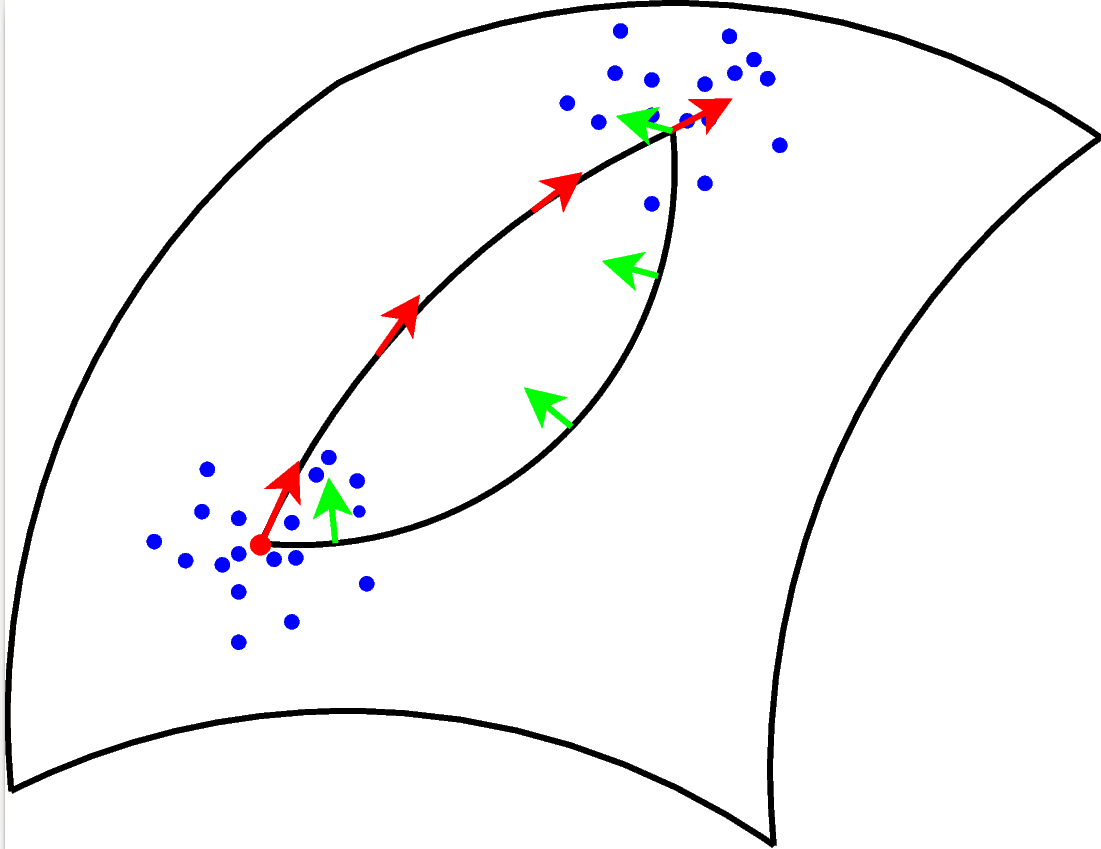
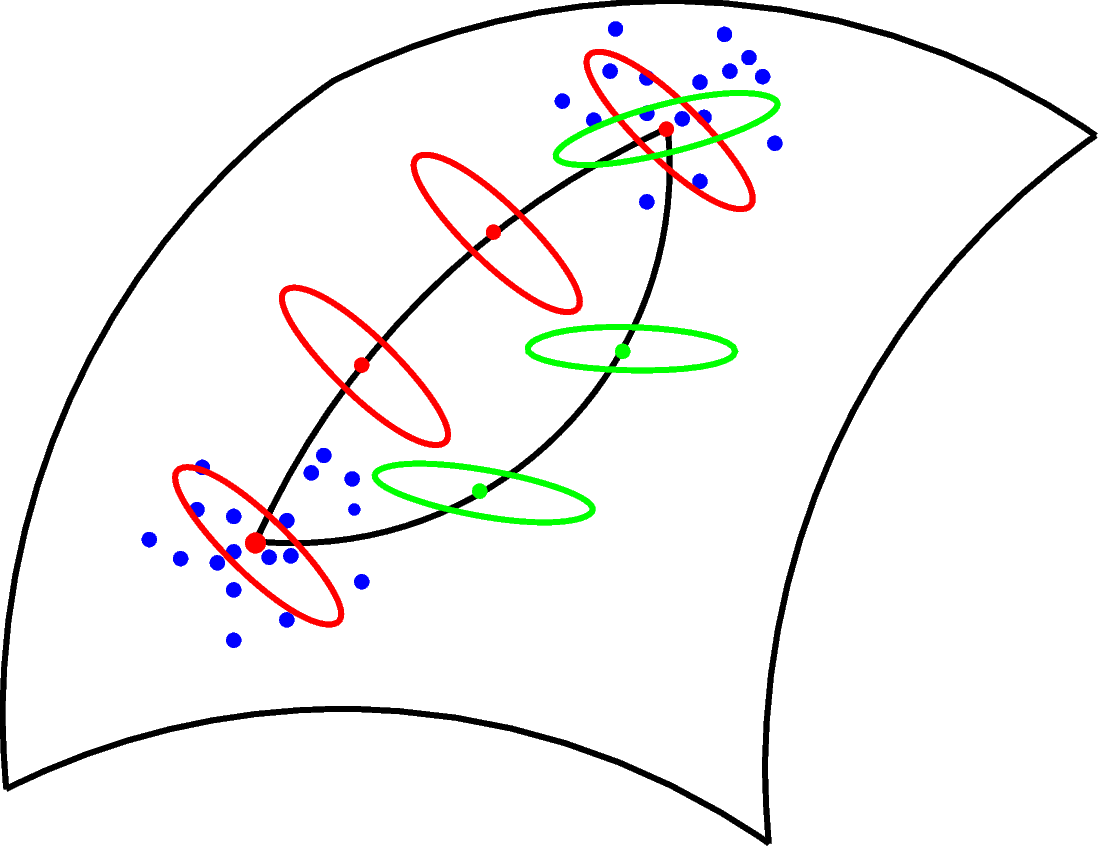
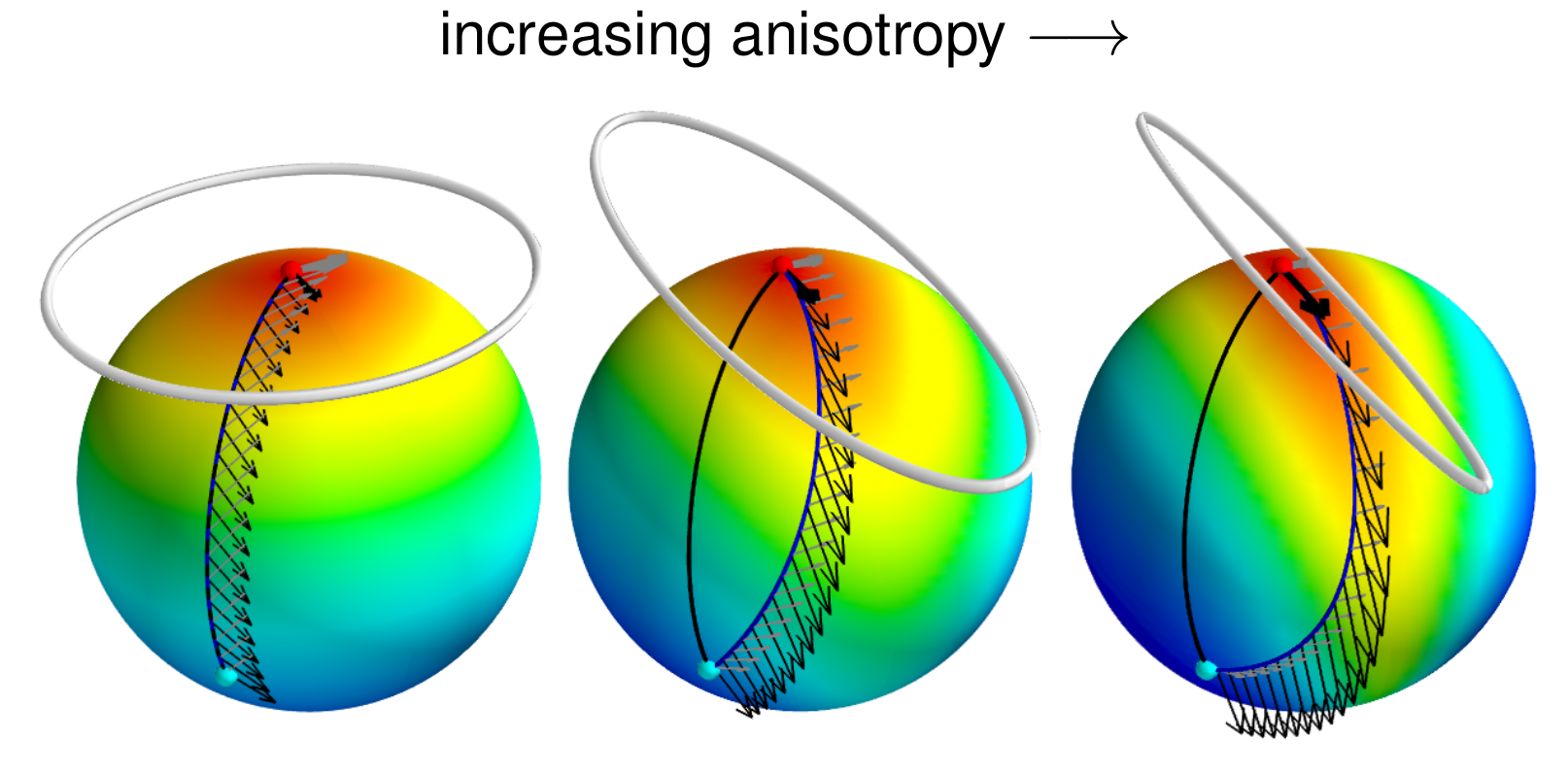
Non-Euclidean generalizations of PCA:
Infinitesimal Probabilistic principal components (PPCA)
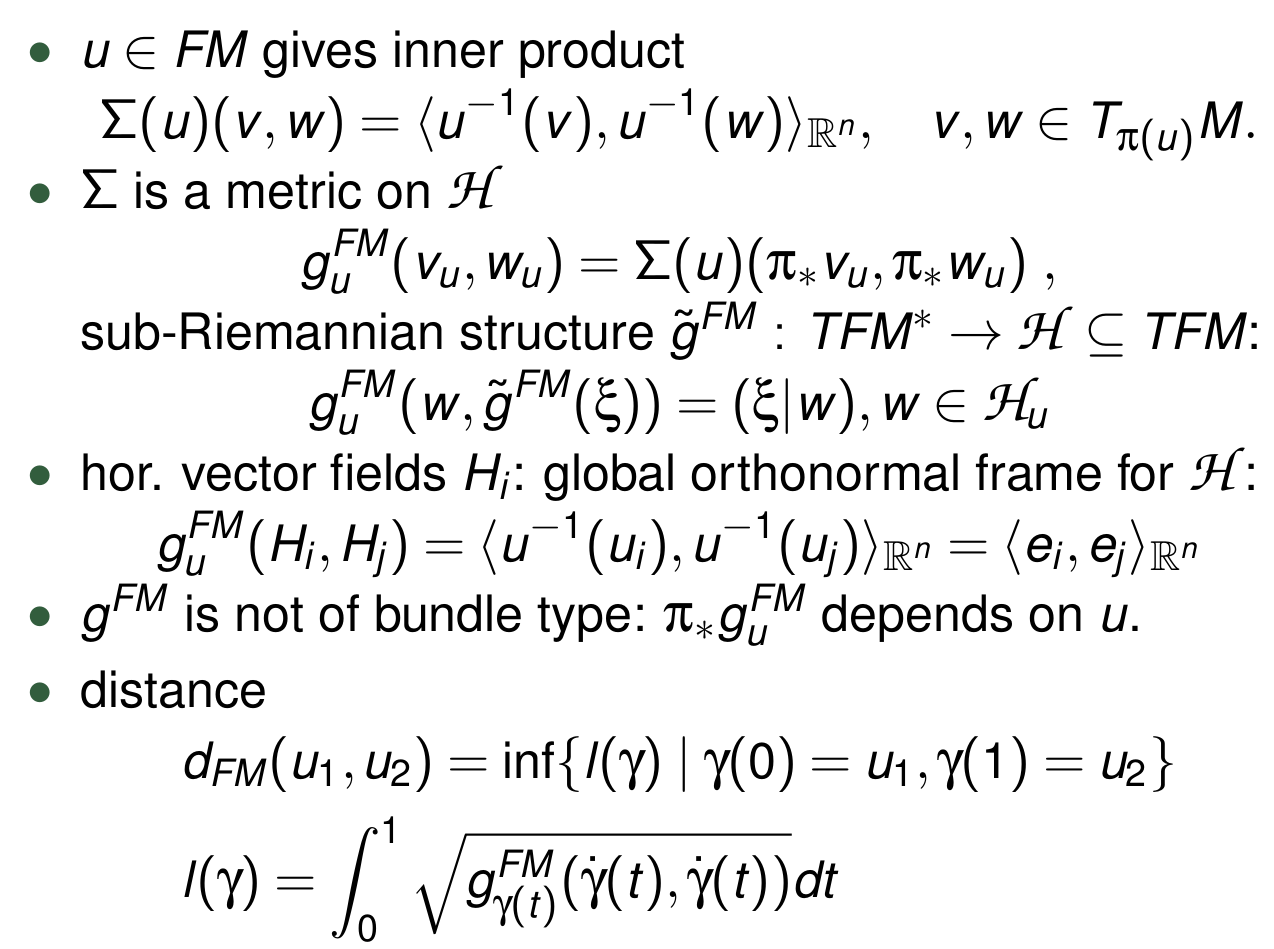
\(h_u=(\pi_*|_{H_uFM})^{-1}\)
\(H_i(u)=h_u(ue_i)\)
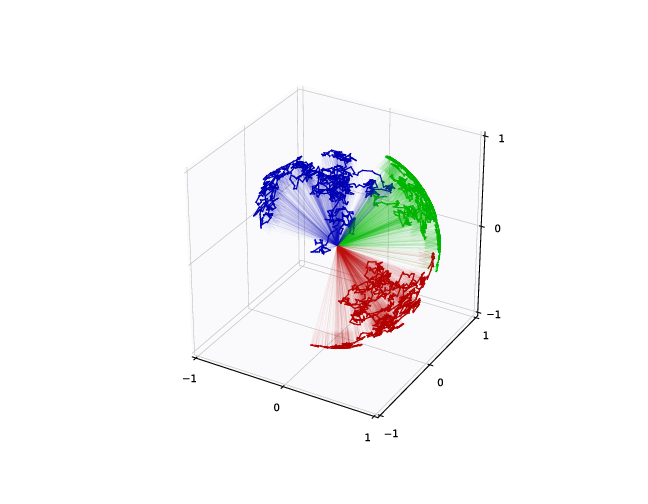
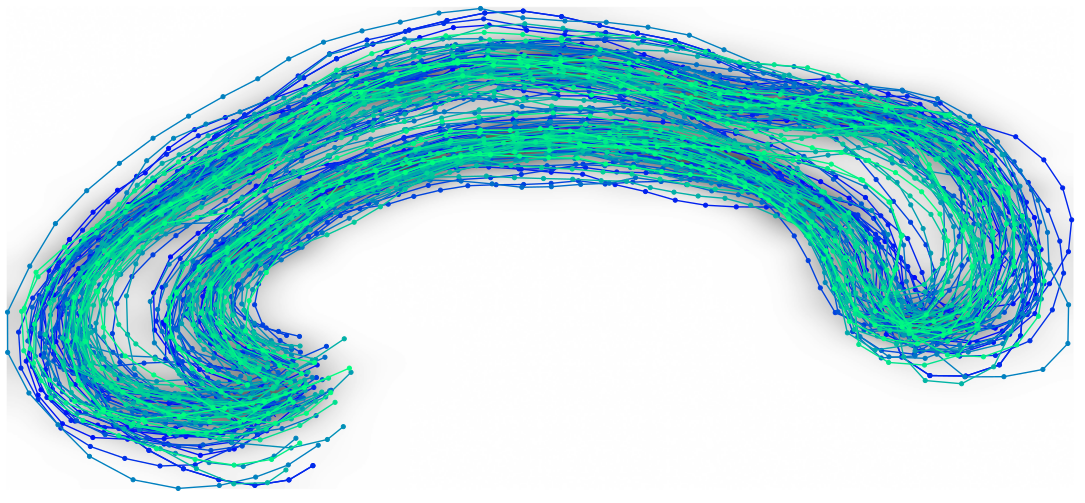
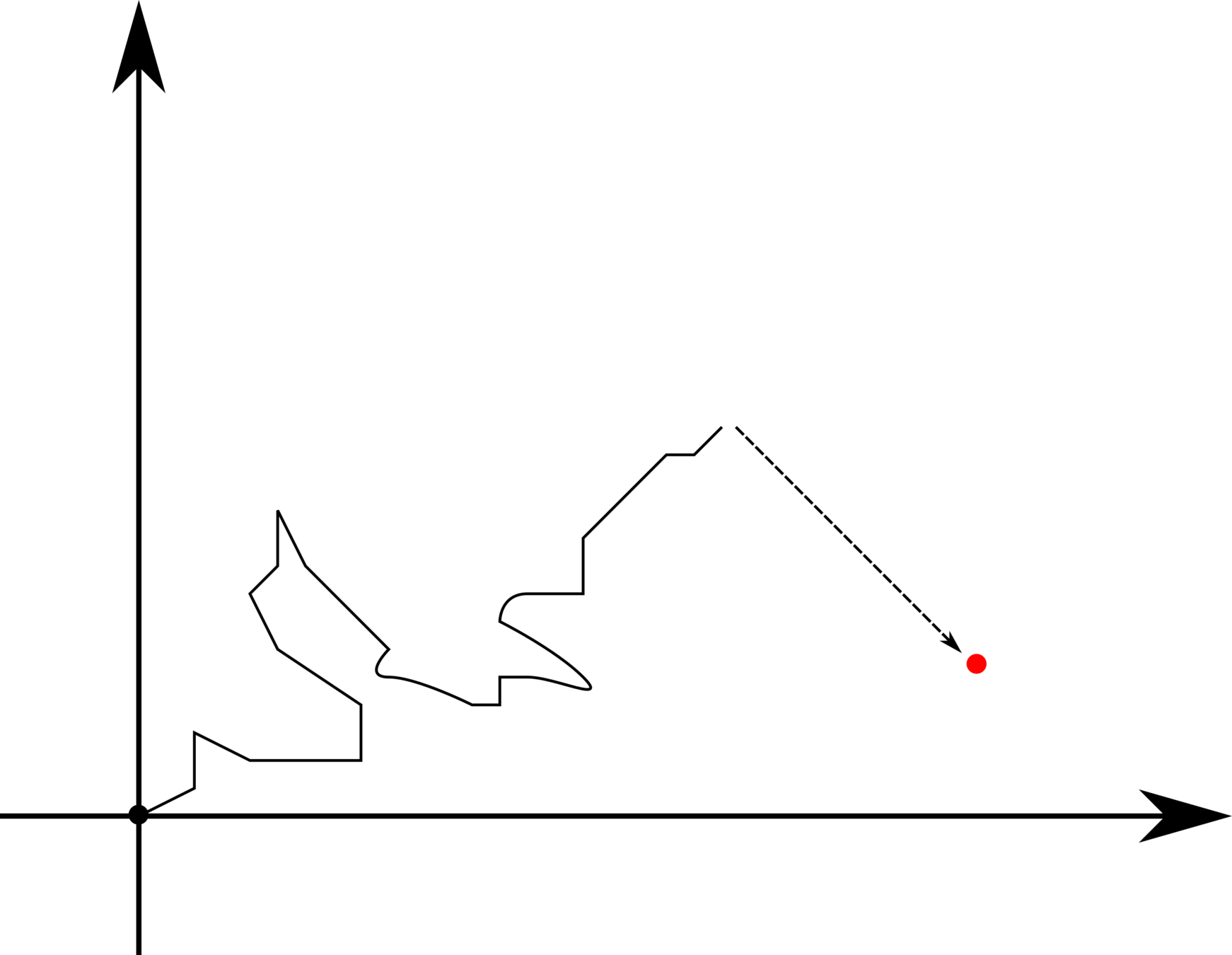
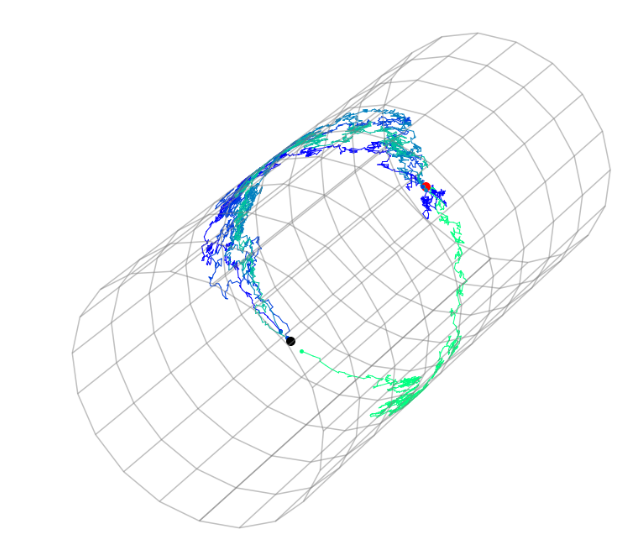
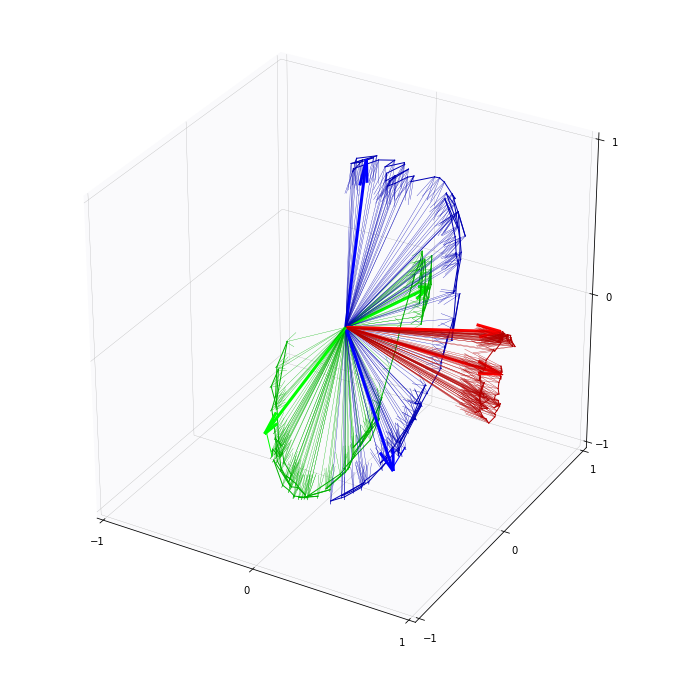
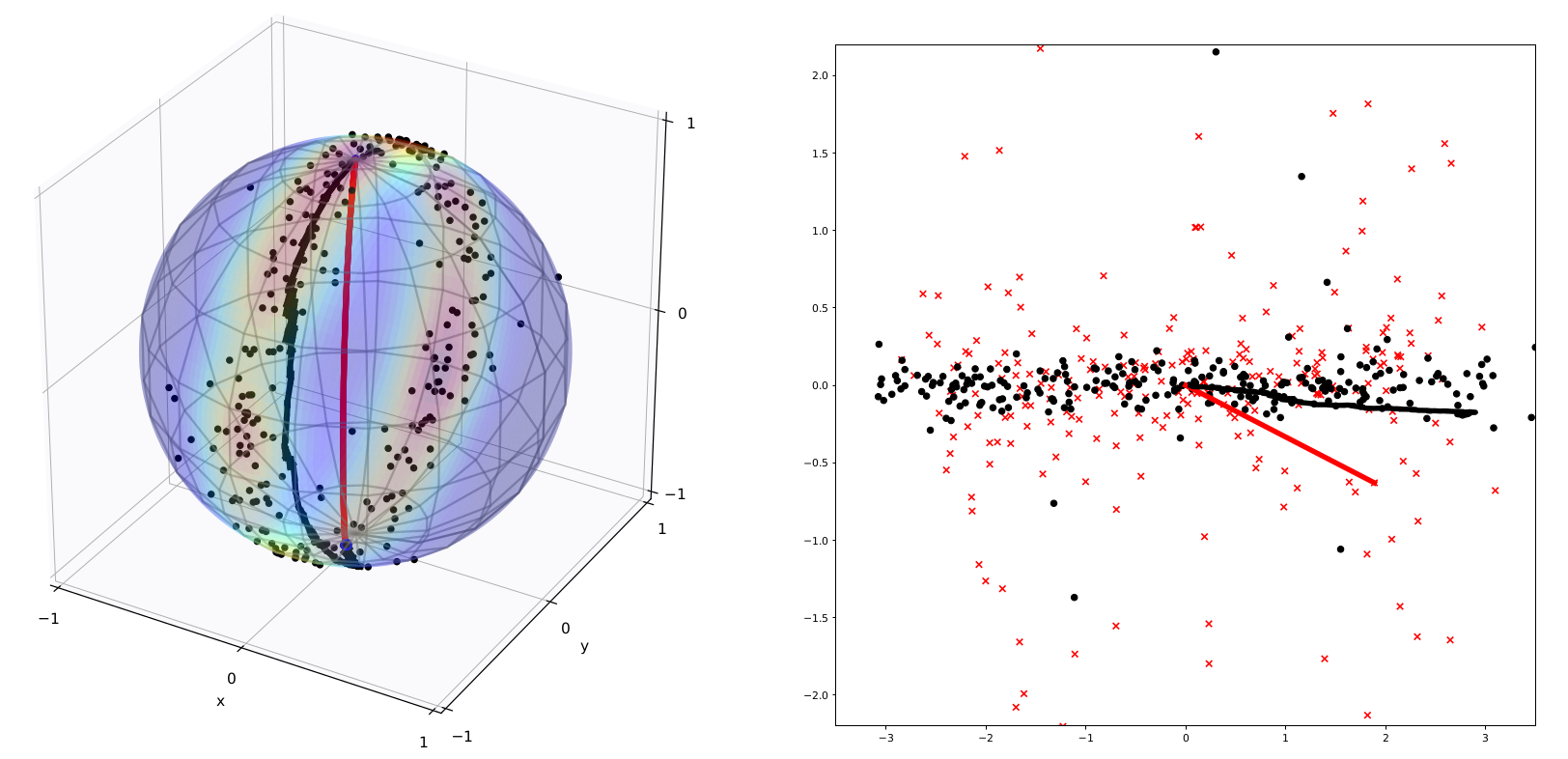
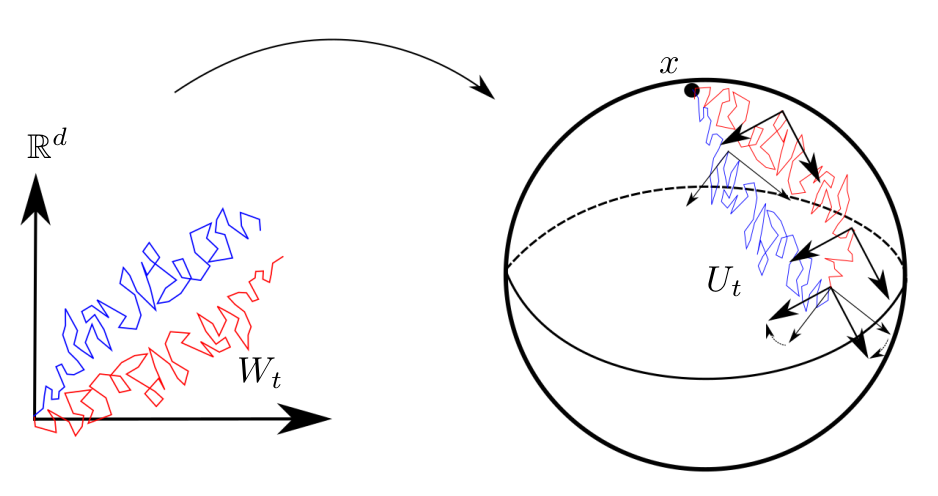
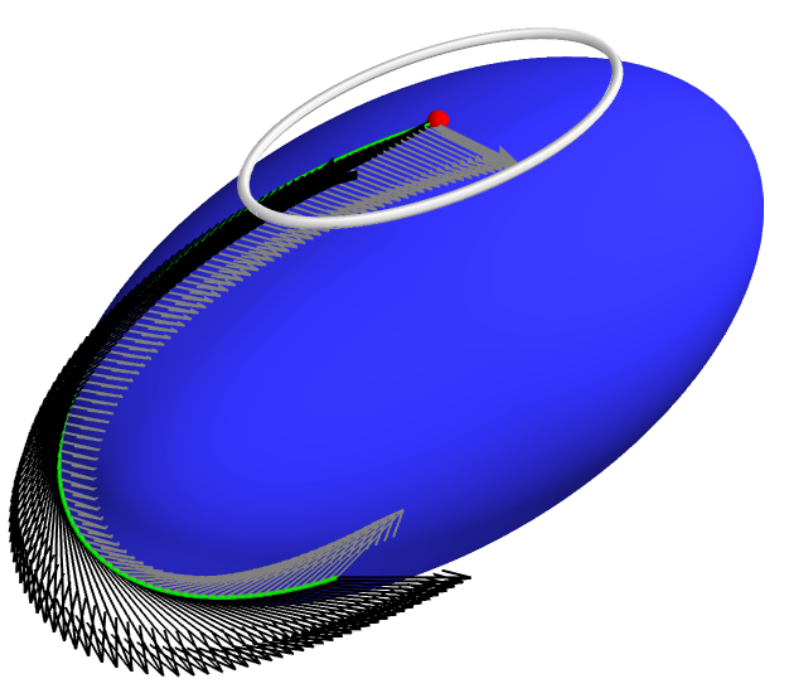
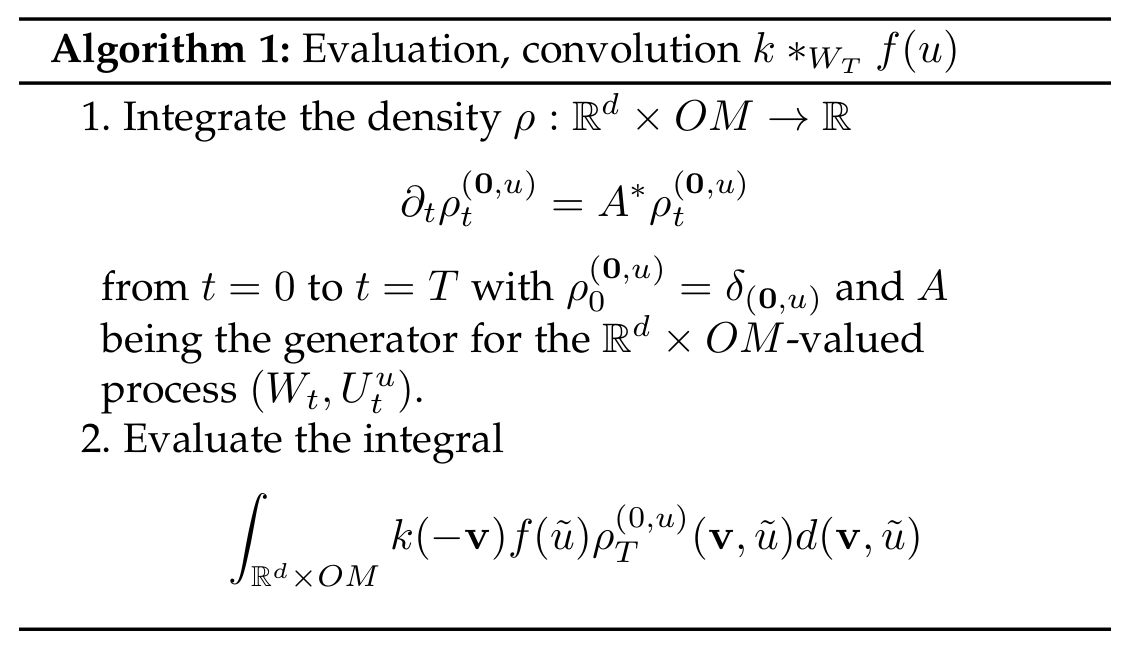
Stochastic development:
\(dU_t=\sum_{i=1}^d H_i\circ_{\mathcal S} dW_t^i\)
\(W_t\) Euclidean Brownian motion
\(X_t=\pi(U_t)\) Riemannian Brownian motion
\(X_t\) supports stochastic parallel transport
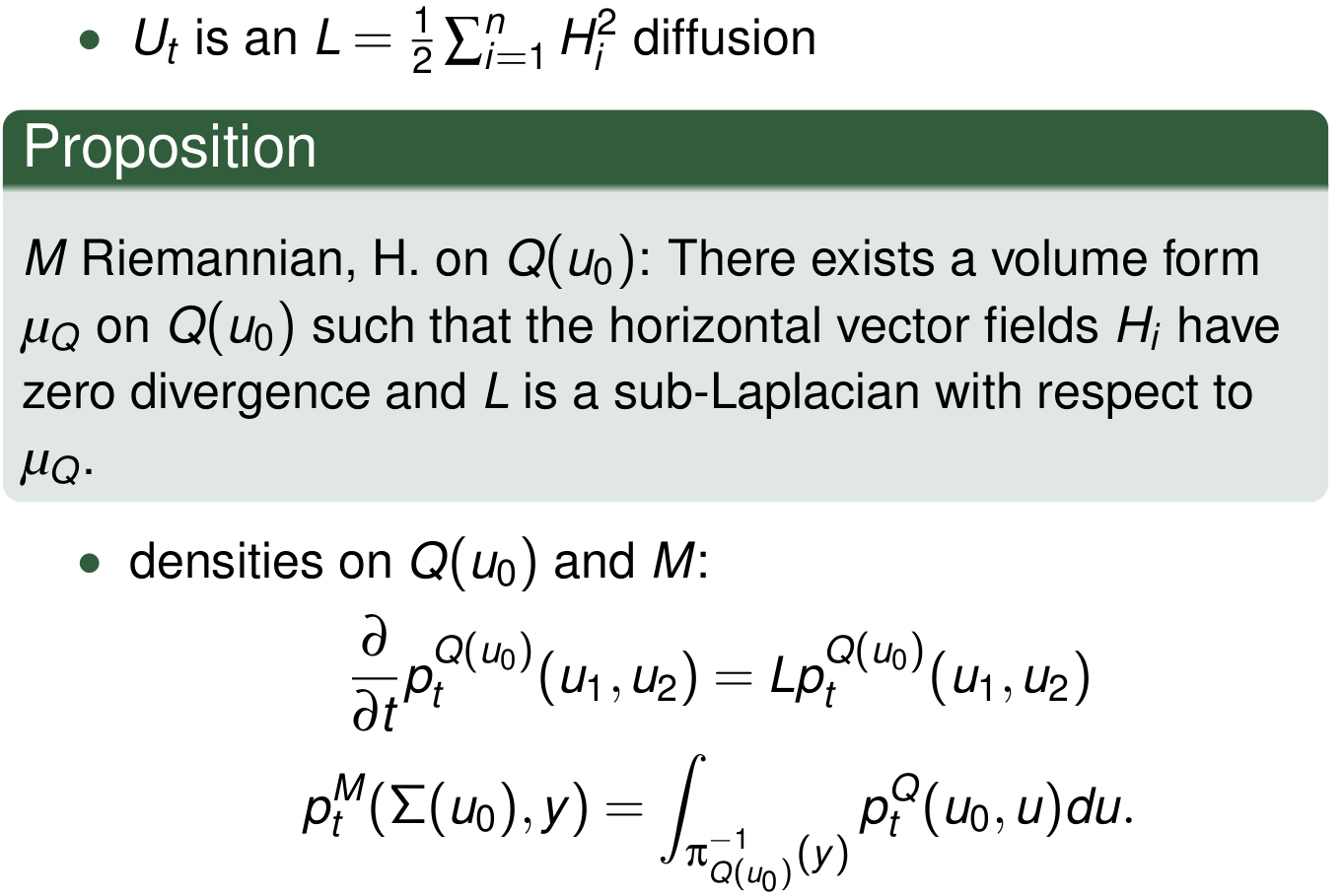
Fix \(T>0\): \(U_T\) probability distribution in \(FM\)
... as opposed to geodesics only
Need measure on path space \(W ([0, T ], M )\)
Sommer,Svane,JGM'15; Sommer,Entropy,'16
Sommer,Bronstein,TPAMI'20
code: http://bitbucket.com/stefansommer/theanogeometry
slides: https://slides.com/stefansommer
References:
By Stefan Sommer




