




Stefan Sommer
Professor at Department of Computer Science, University of Copenhagen
Stefan Sommer, University of Copenhagen
Faculty of Science, University of Copenhagen
Stochastic Morphometrics 2022
w/ Alexis Arnaudon, Darryl Holm, Sarang Joshi, Frank v.d. Meulen, Moritz Schauer, Benjamin Eltzner, Stephan Huckemann, Line Kuhnel, Mathias H. Jensen, Pernille E.H. Hansen, Mads Nielsen, Rasmus Nielsen, Christy Hipsley
Villum foundation
Novo nordisk foundation
University of Copenhagen
action: \(\phi.s=\phi\circ s\) (shapes)
\(\phi.s=s\circ\phi^{-1}\) (images)
\( \phi \)
\( \phi \) warp of domain \(\Omega\) (2D or 3D space)
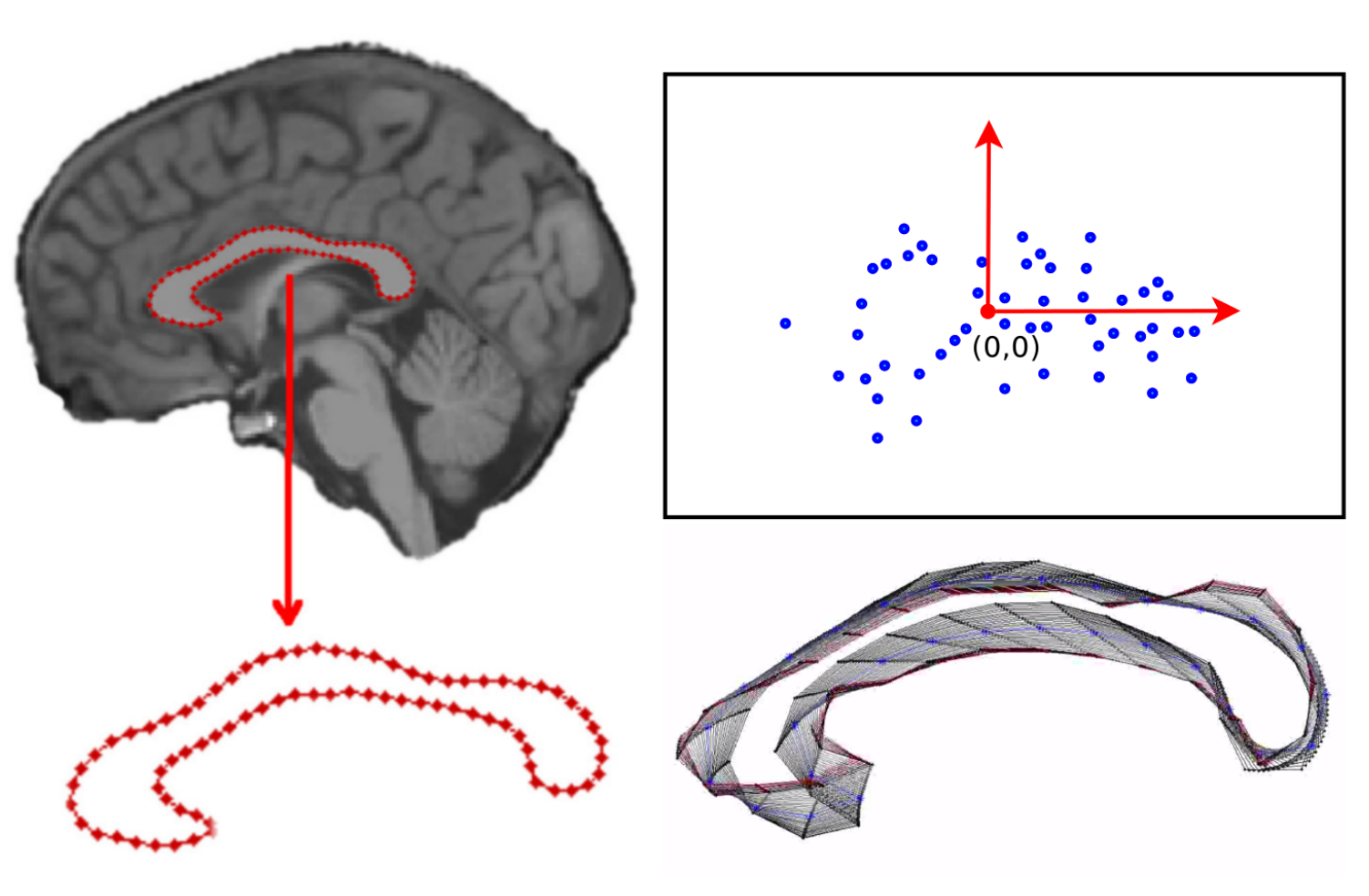
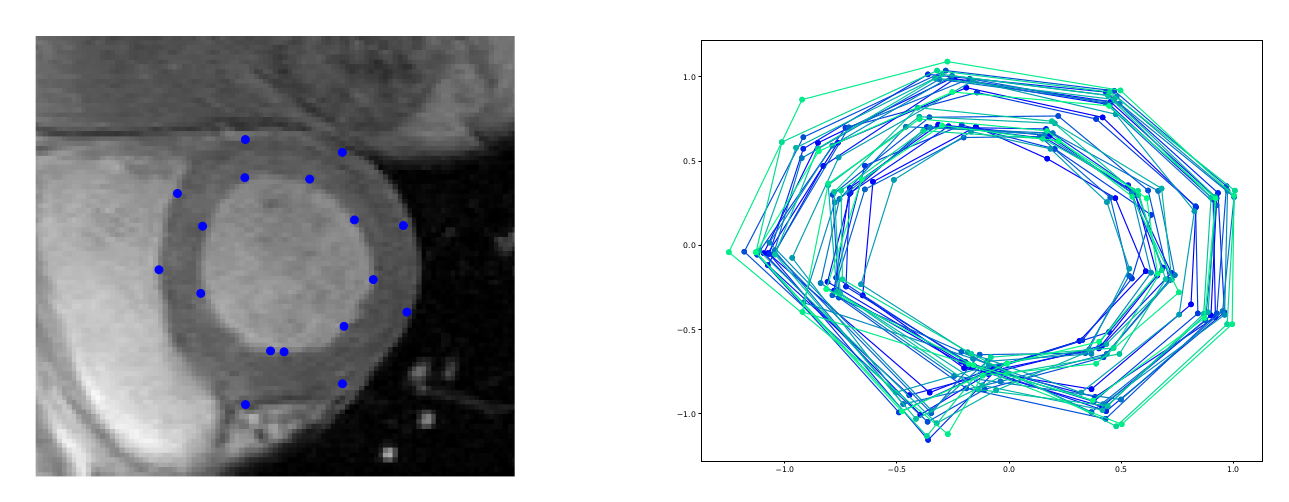
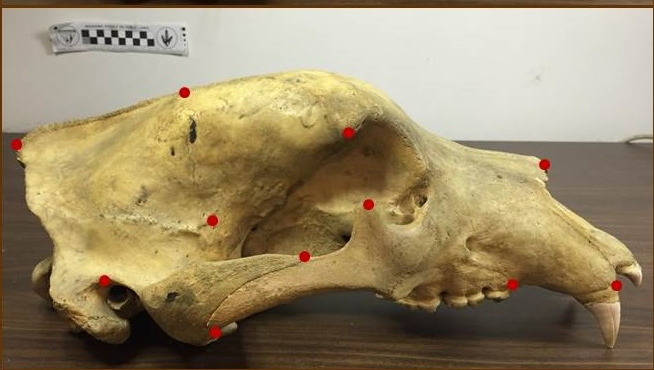
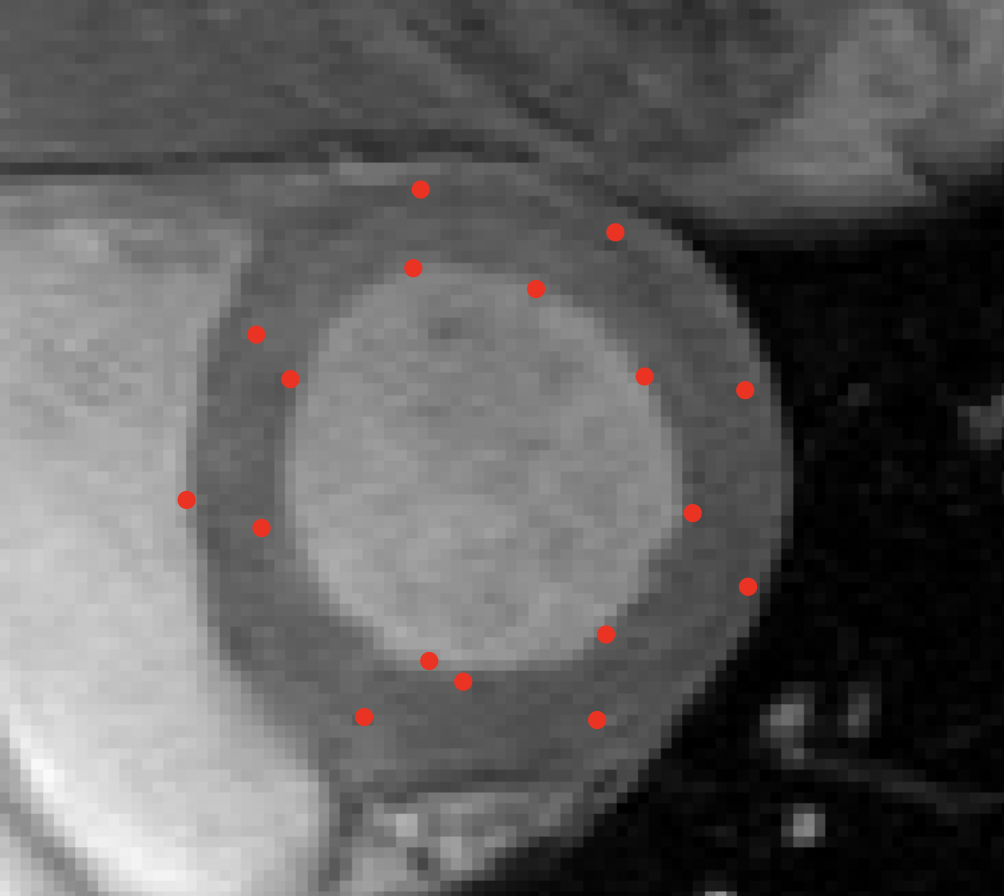
landmarks: \(s=(x_1,\ldots,x_n)\)
curves: \(s: \mathbb S^1\to\mathbb R^2\)
surfaces: \(s: \mathbb S^2\to\mathbb R^3\)
\( \phi_t:[0,T]\to\mathrm{Diff}(\Omega) \) path of diffeomorphisms (parameter t)
LDDMM: Grenander, Miller, Trouve, Younes, Christensen, Joshi, et al.
Markussen,CVIU'07; Budhiraja,Dupuis,Maroulas,Bernoulli'10
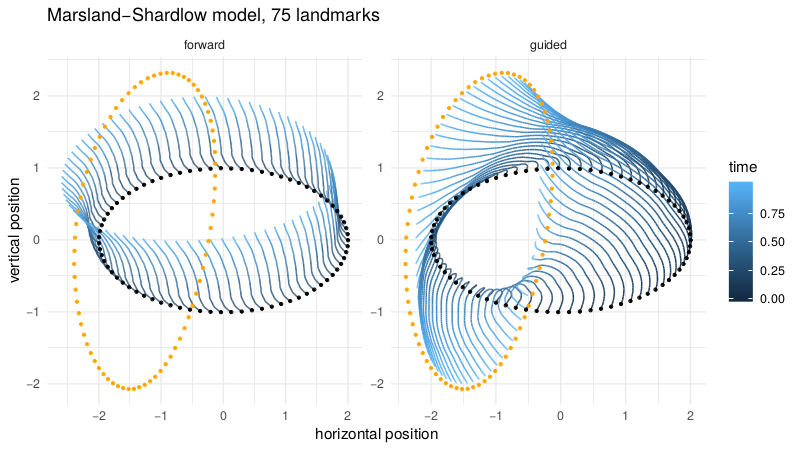
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
Staneva,Younes'17; Sommer,Arnaudon,Kuhnel,Joshi,MFCA'17
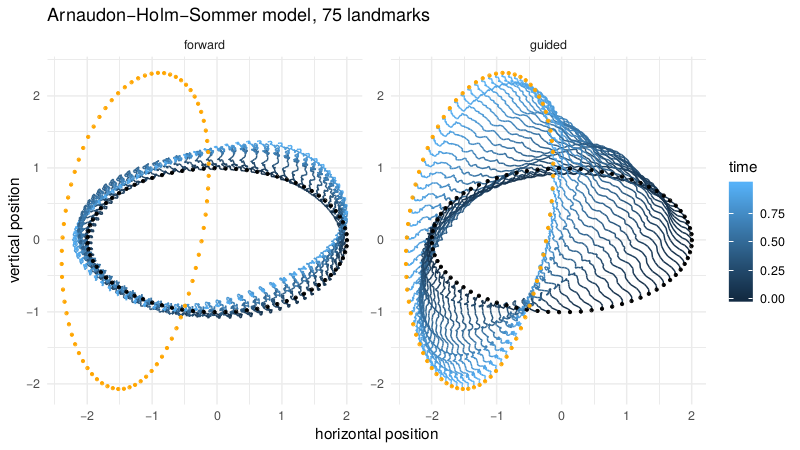
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Arnaudon,v.d. Meulen,Schauer,Sommer'21
Deterministic:
Stochastic:
Sommer,Arnaudon,Kuhnel,Josh,MFCA'17
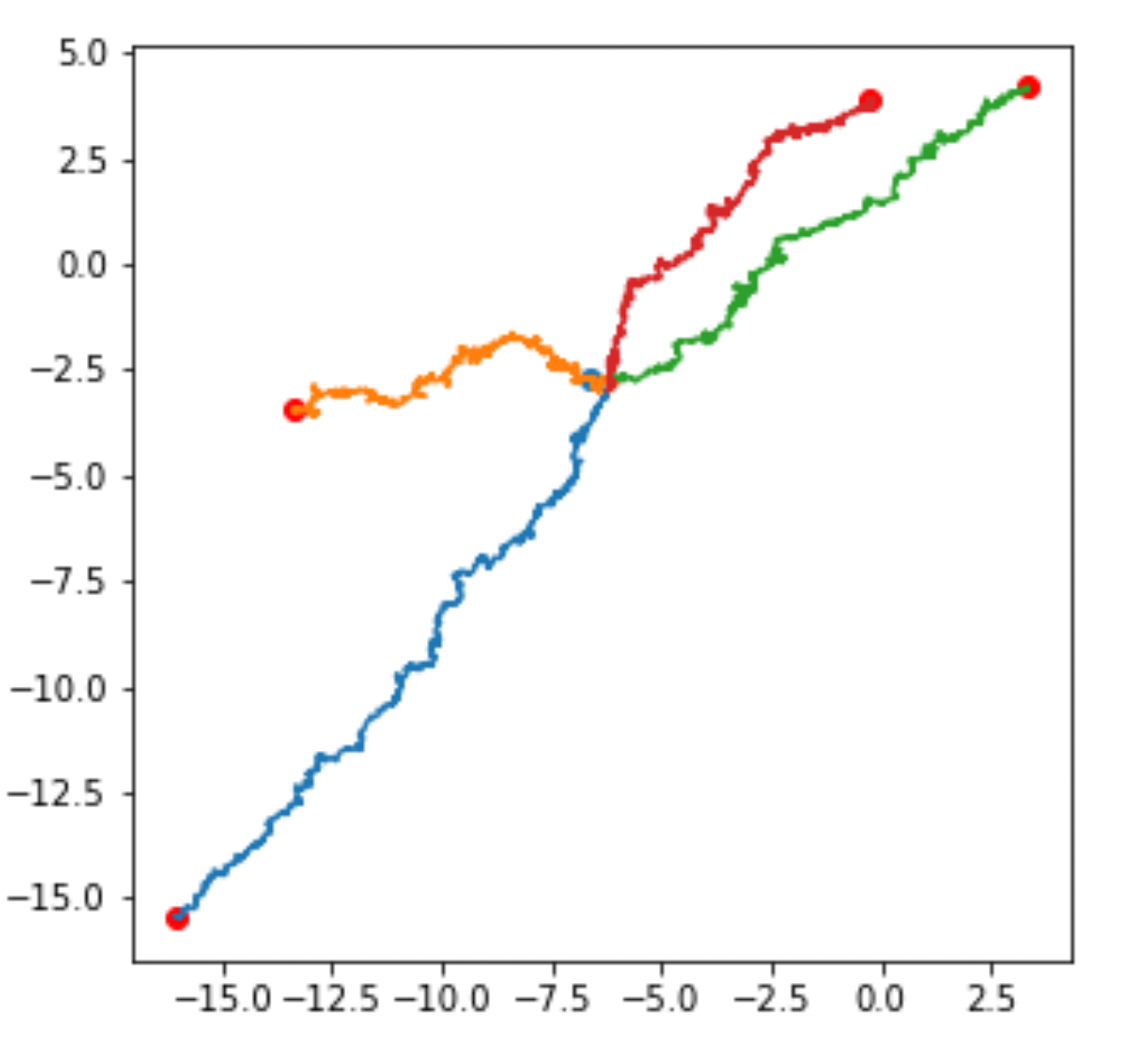
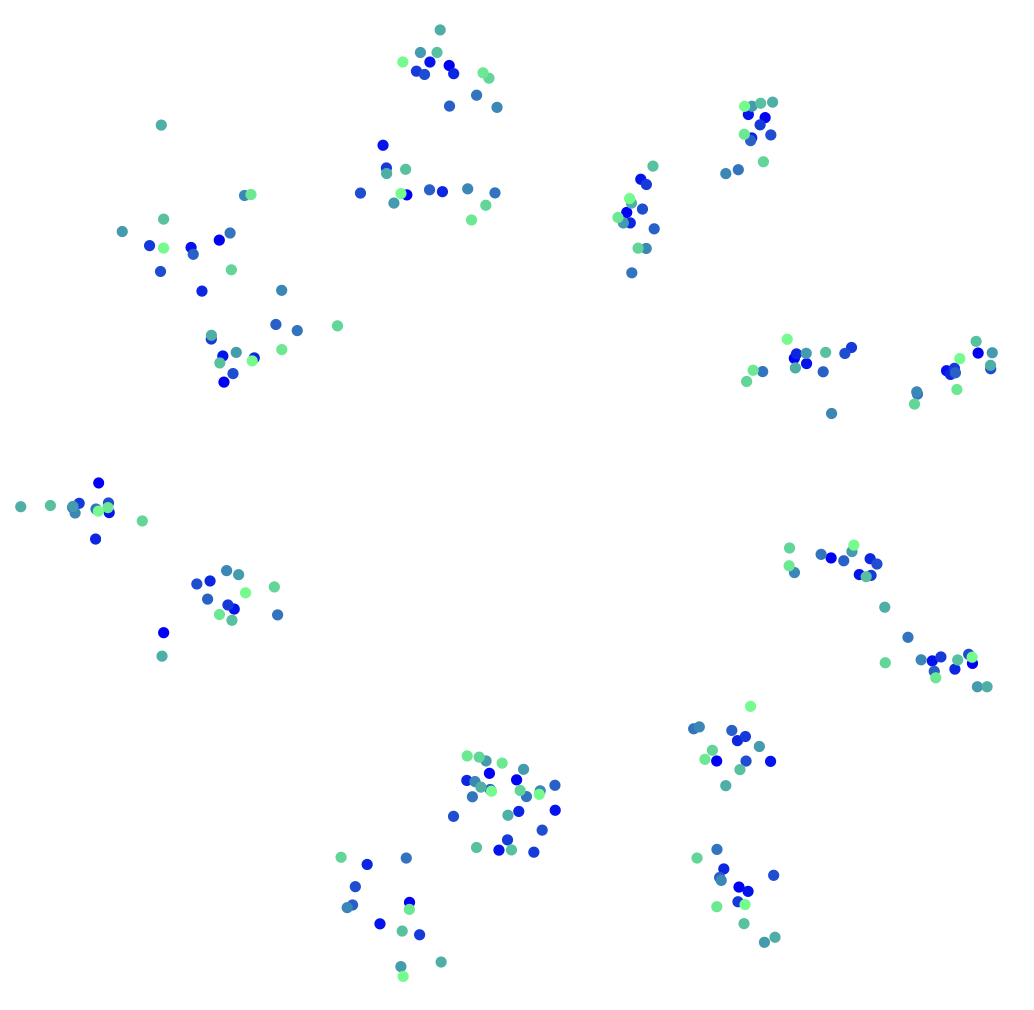
bridge sampling
Delyon/Hu 2006:
\(\sigma\) invertible:
\(v\)
\(x_0\)
\(x_t\)
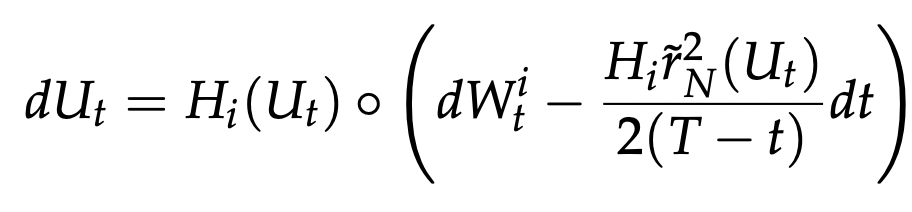
Stochastic perturbation of the reconstruction equation
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Theorem:
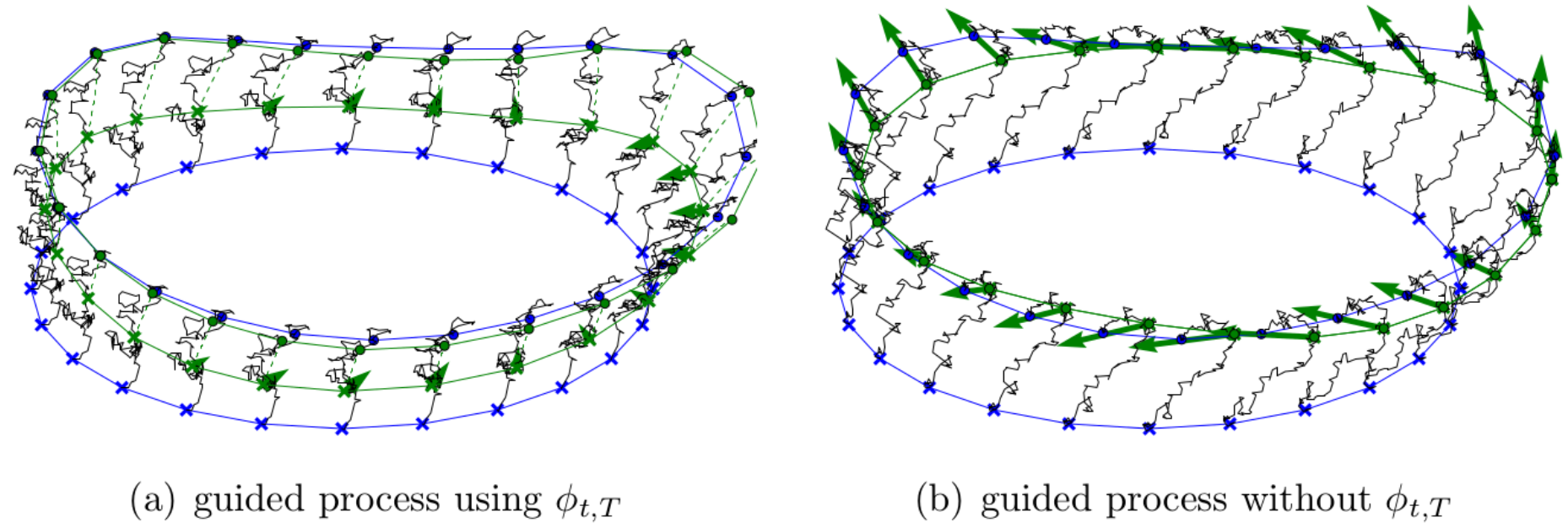
v.d. Meulen,Schauer,Arnaudon,Sommer, SIIMS 21
Jensen, Mallasto, Sommer, GSI 2019 ; Jensen, Sommer, GSI 2021; Jensen, Sommer, arxiv 2021
perturbation of Hamiltonian system
Lagrangian coordinates
\(dq_i^\alpha=\frac{\partial H}{\partial p_i^\alpha}dt\)
\(dp_i^\alpha=-\frac{\partial H}{\partial q_i^\alpha}dt+\gamma_idW^i_t\)
\(dp_i^\alpha=-\lambda\frac{\partial H}{\partial p_i^\alpha}dt-\frac{\partial H}{\partial q_i^\alpha}dt+\gamma_idW^i_t\)
Marsland/Shardlow,SIIMS'17
Trouve,Vialard,QAM'12;Vialard,SPA'13
v.d. Meulen,Schauer,Arnaudon,Sommer,arxiv'21
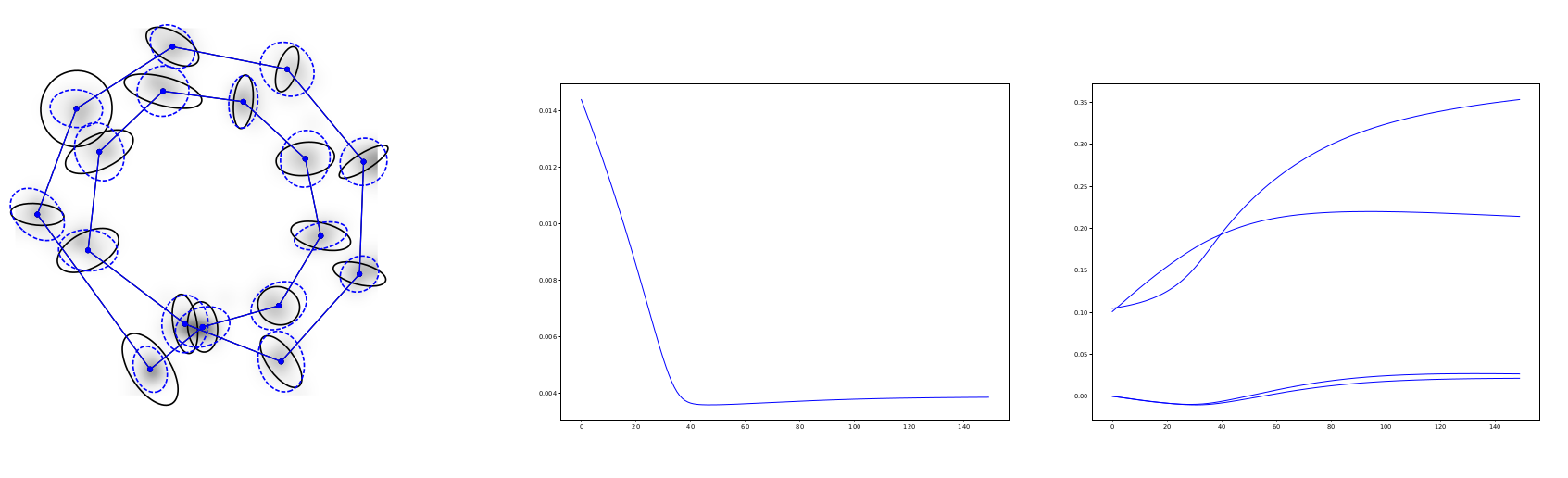
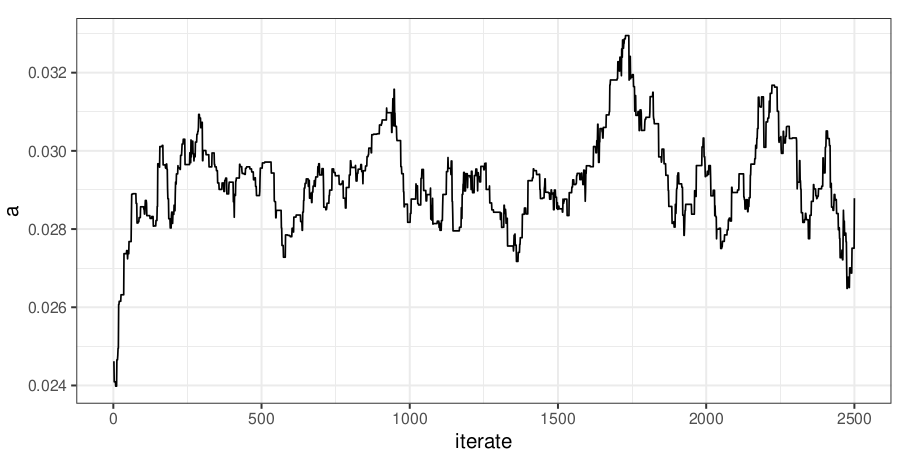
Hamiltonian kernel parameter
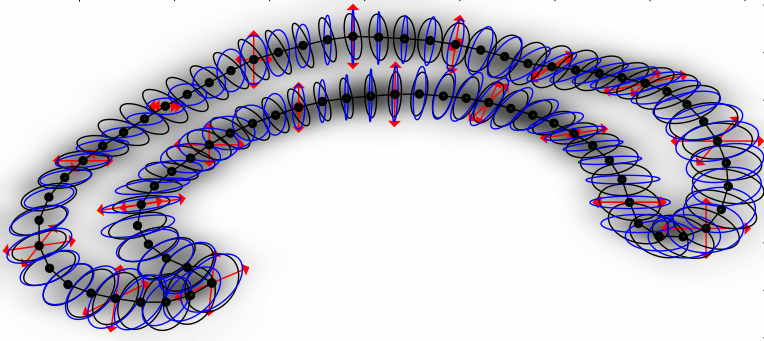
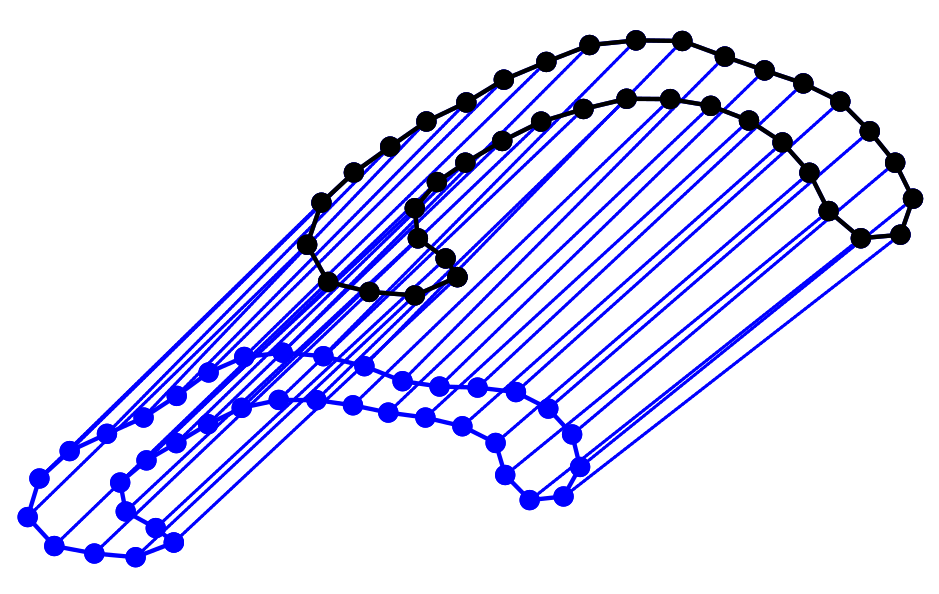
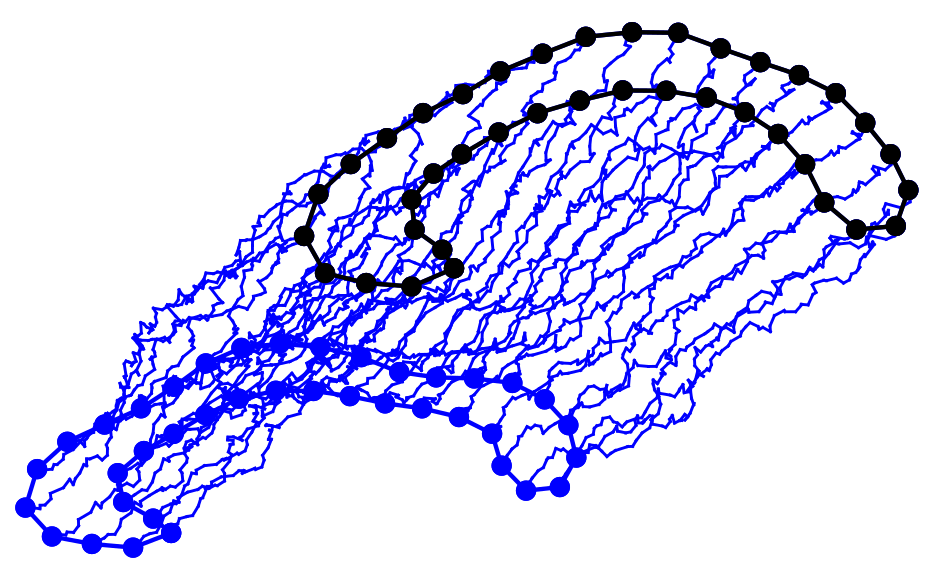
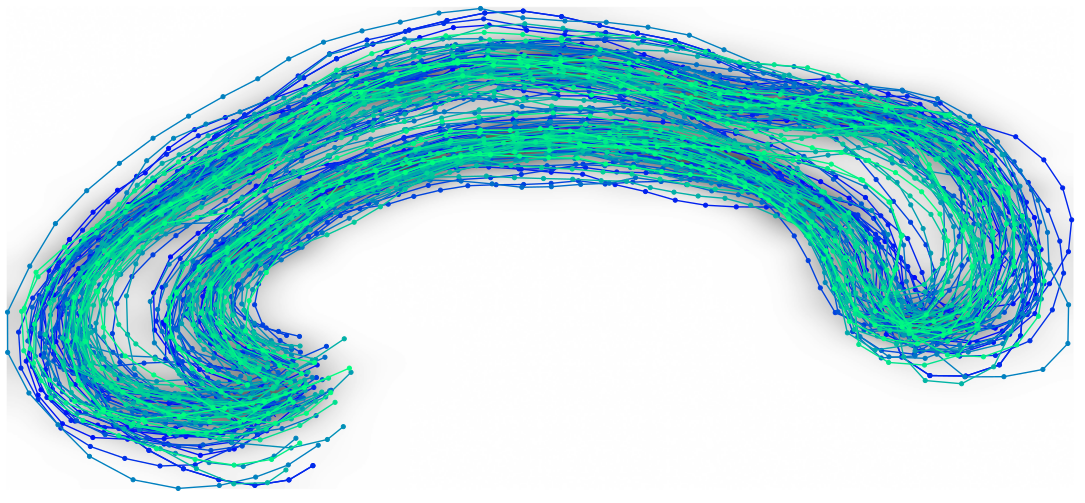
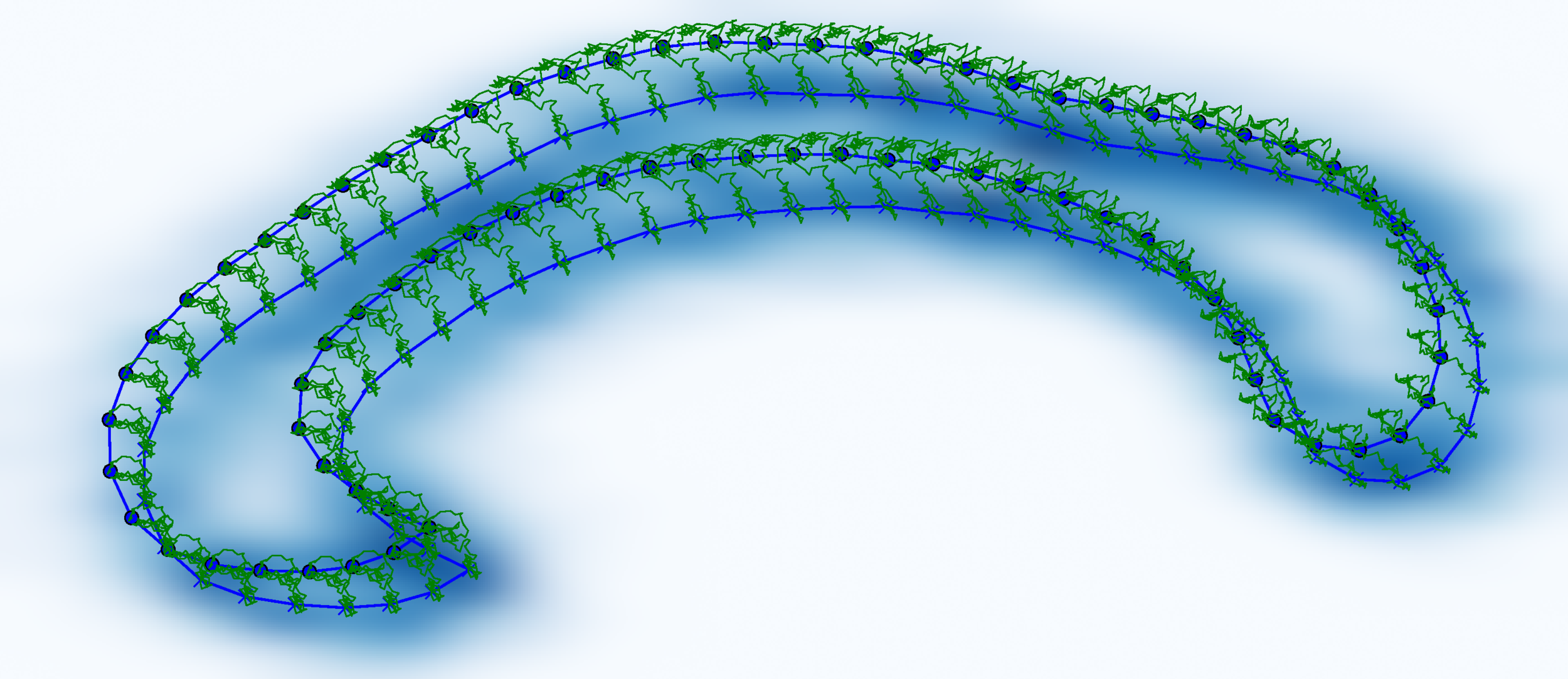
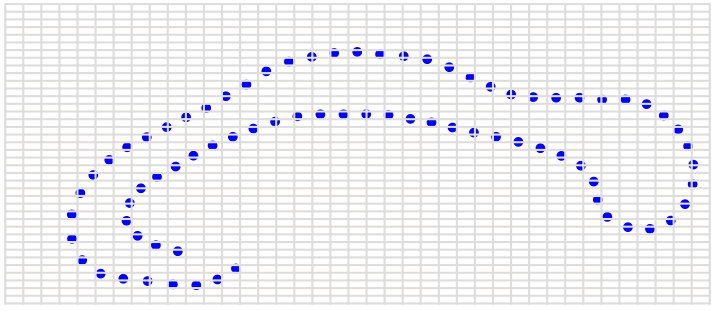
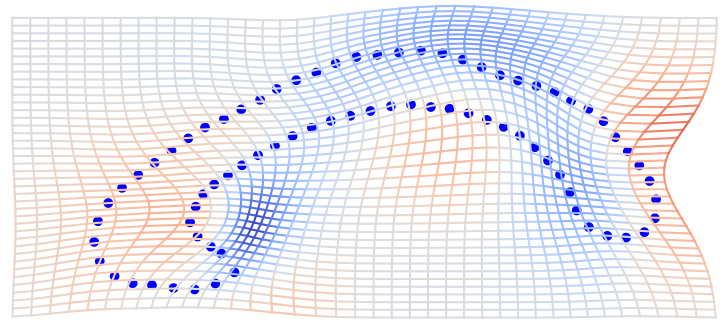
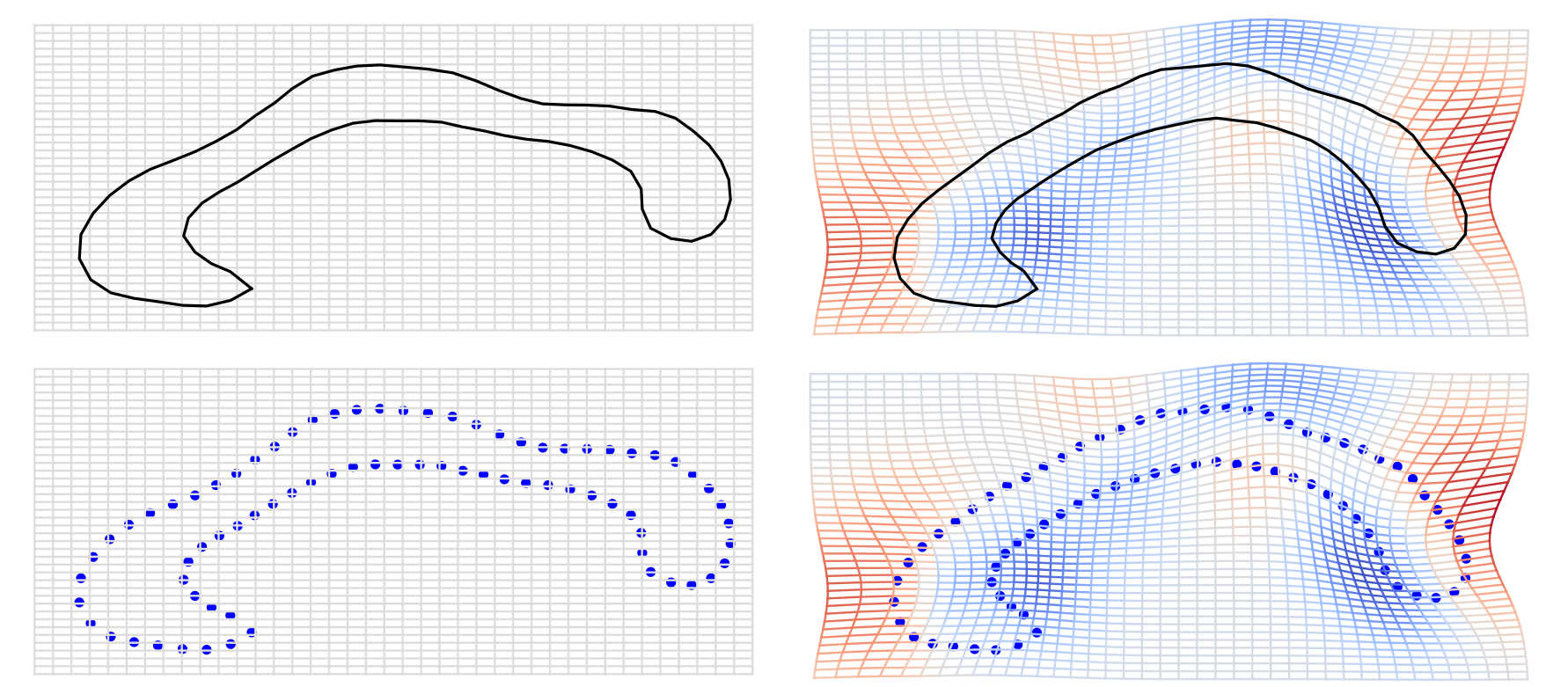
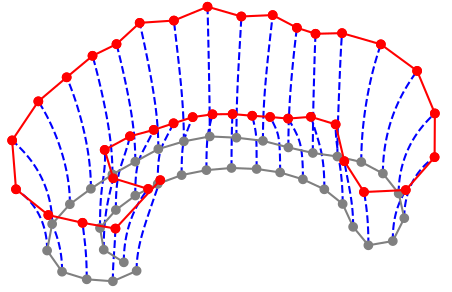
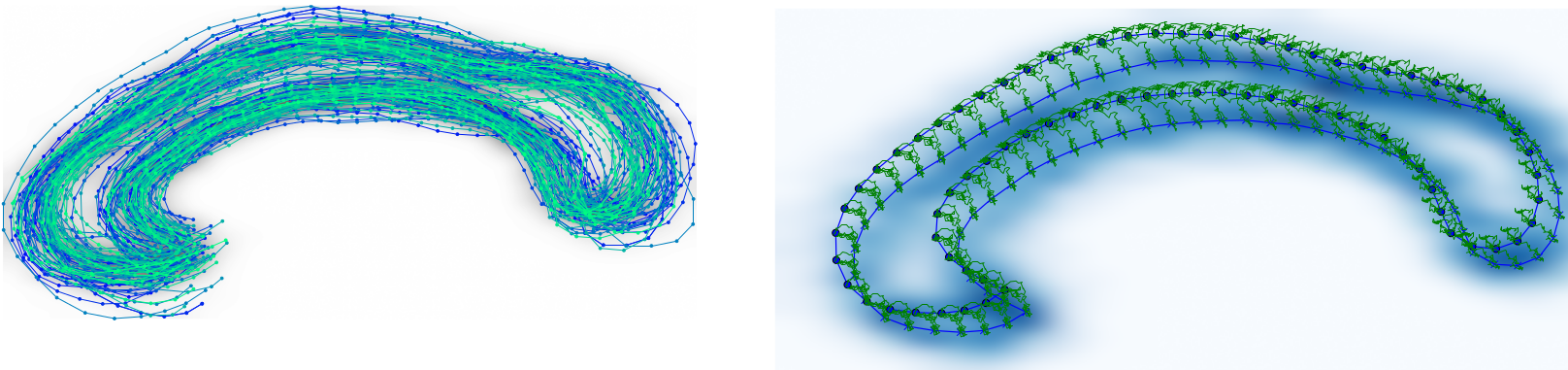
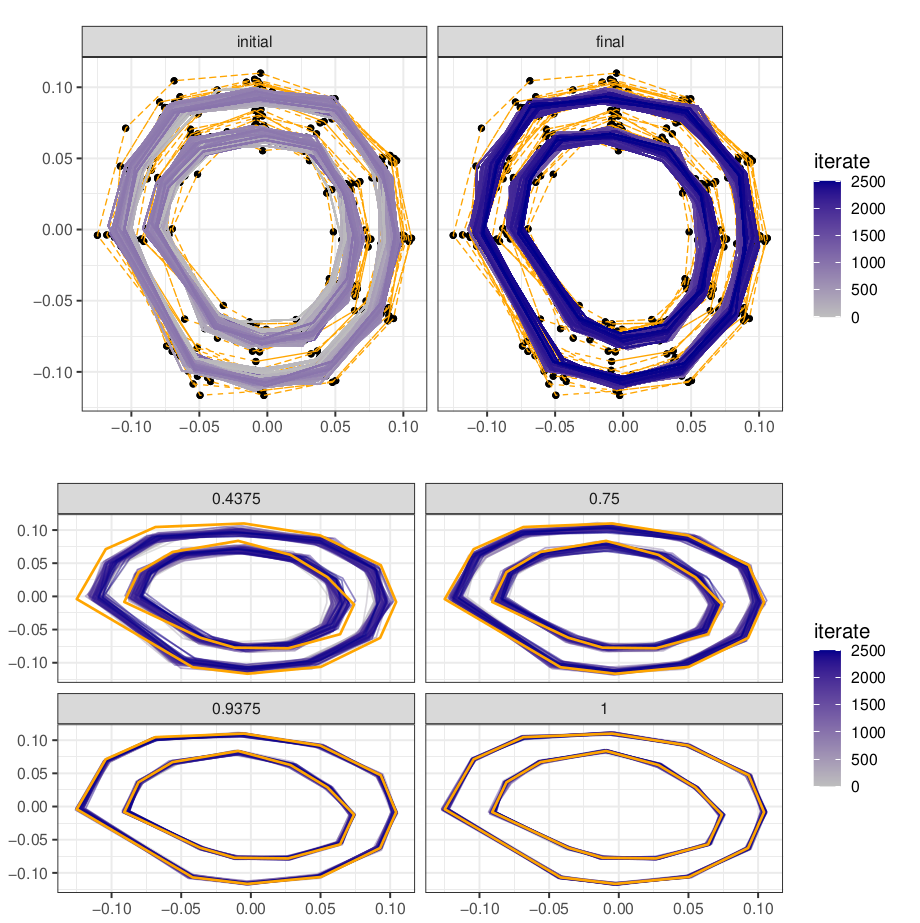
corpus callosum bridge
ventricles
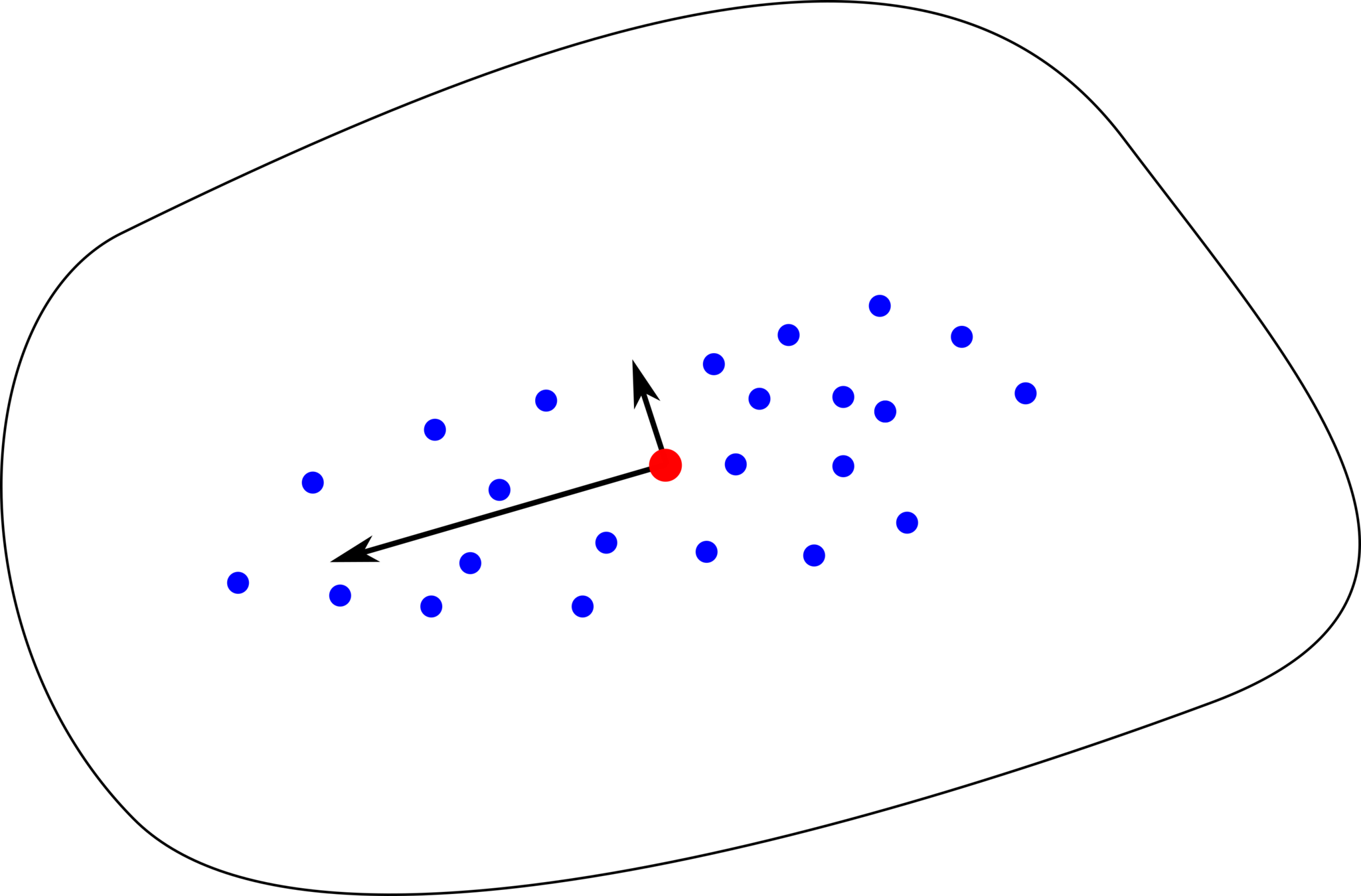
Generalization of Euclidean statistical notions and techniques.
Nye, White, JMIV'14;
Sommer,IPMI'15; Sommer,Svane,JGM'15;
Hansen,Eltzner,Huckemann,Sommer,GSI'21,'21
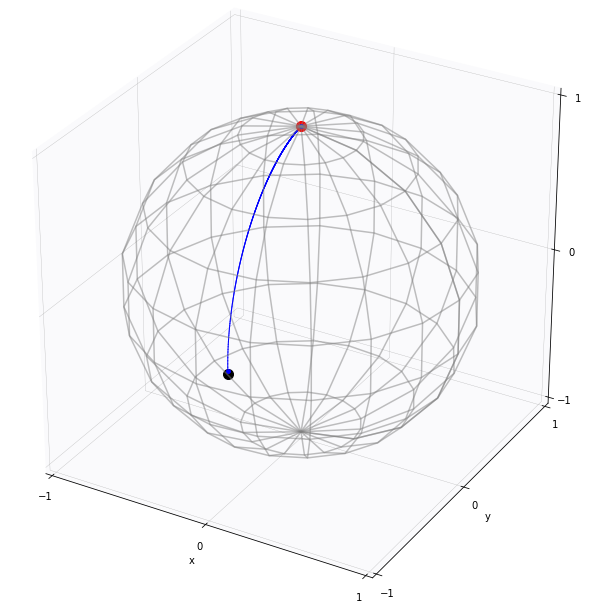
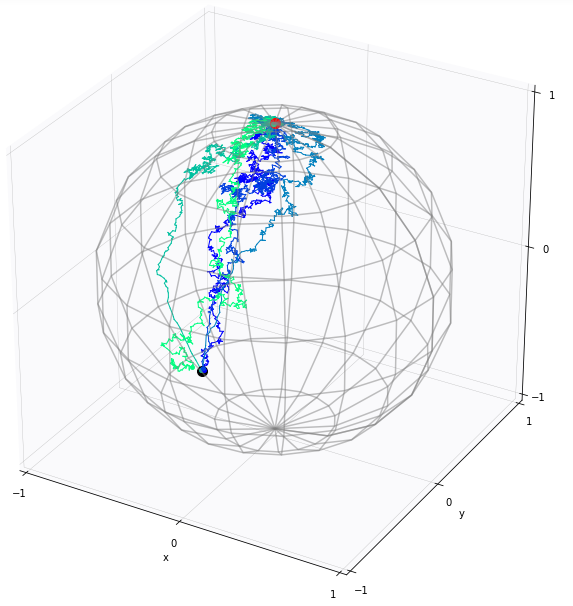
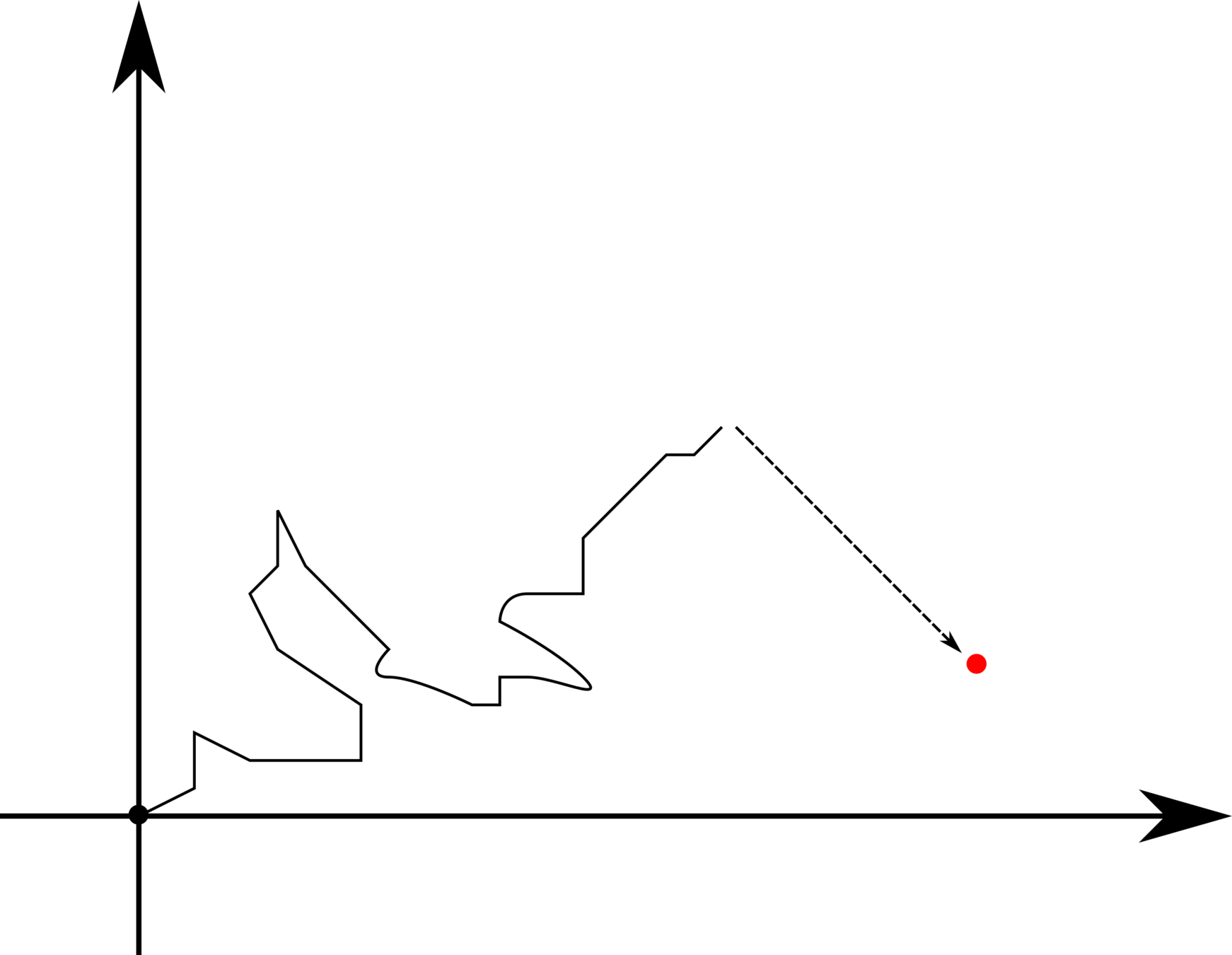
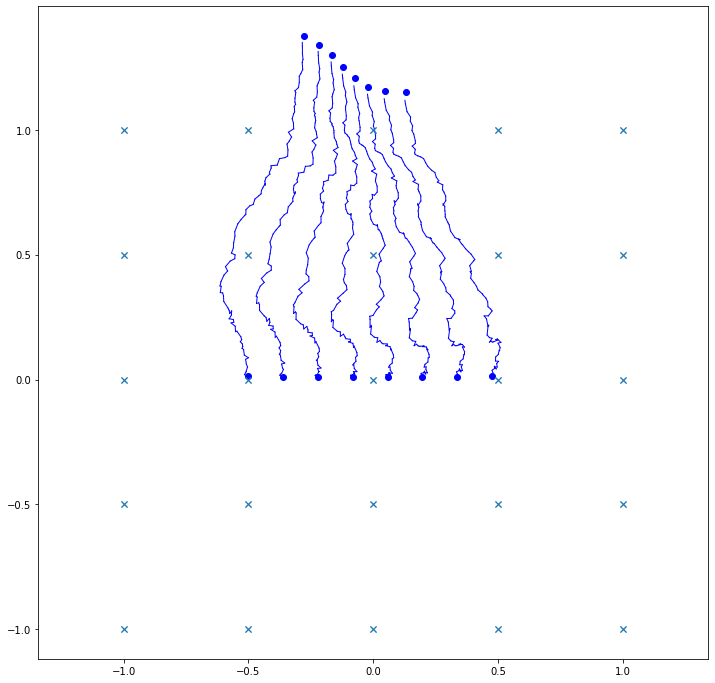
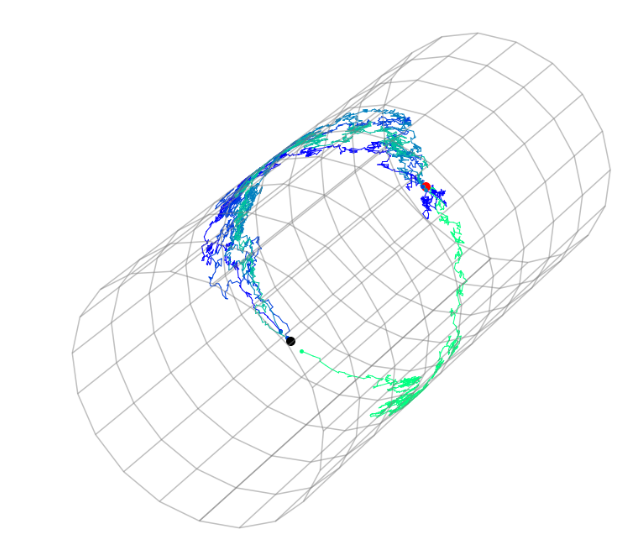
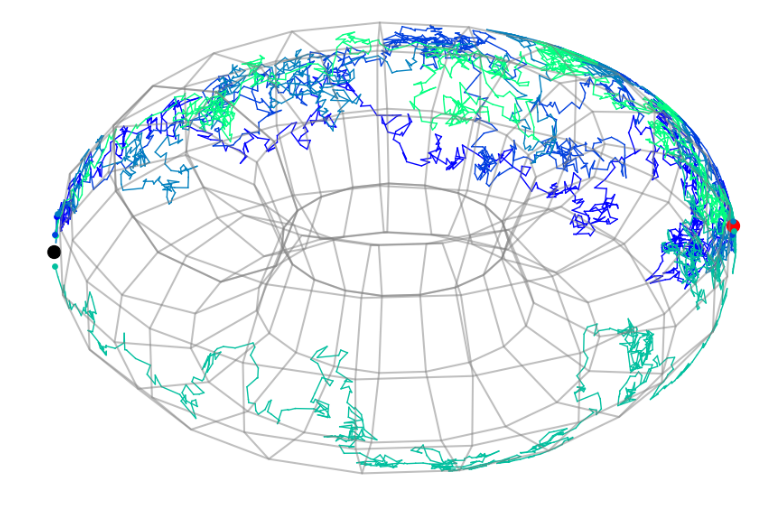
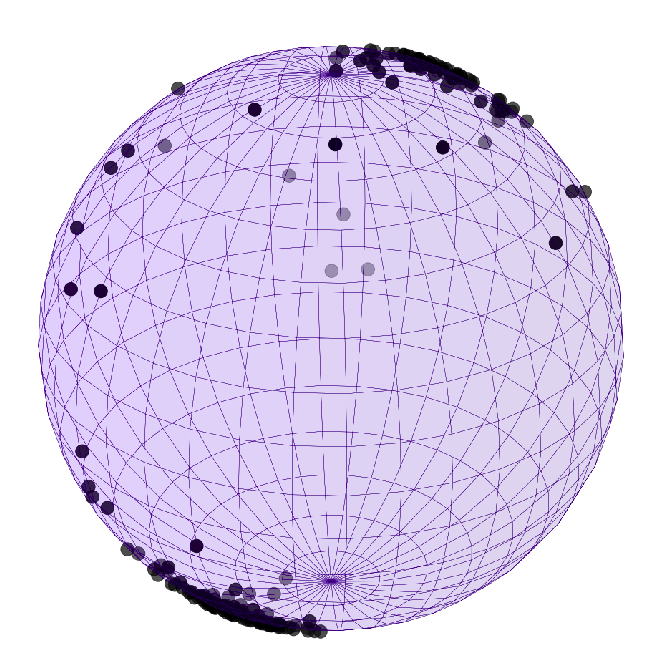
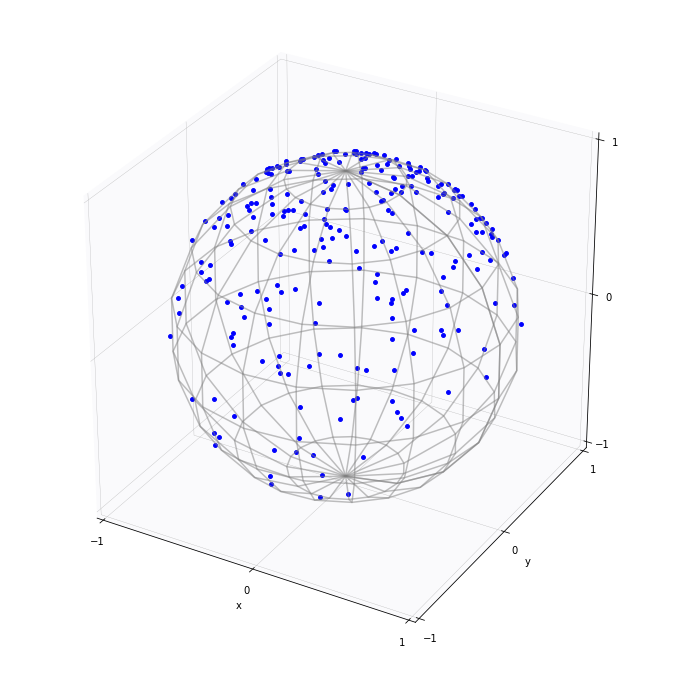
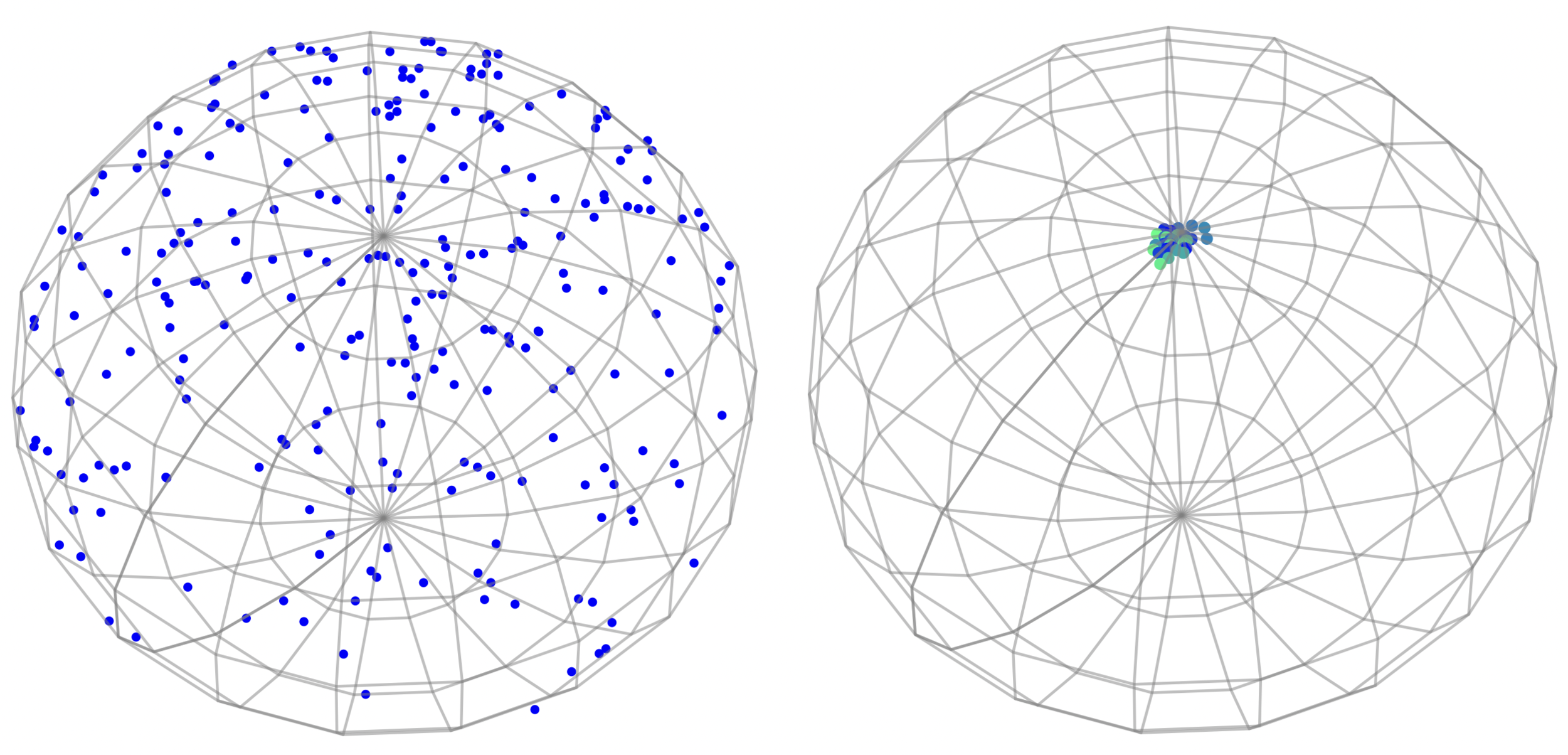
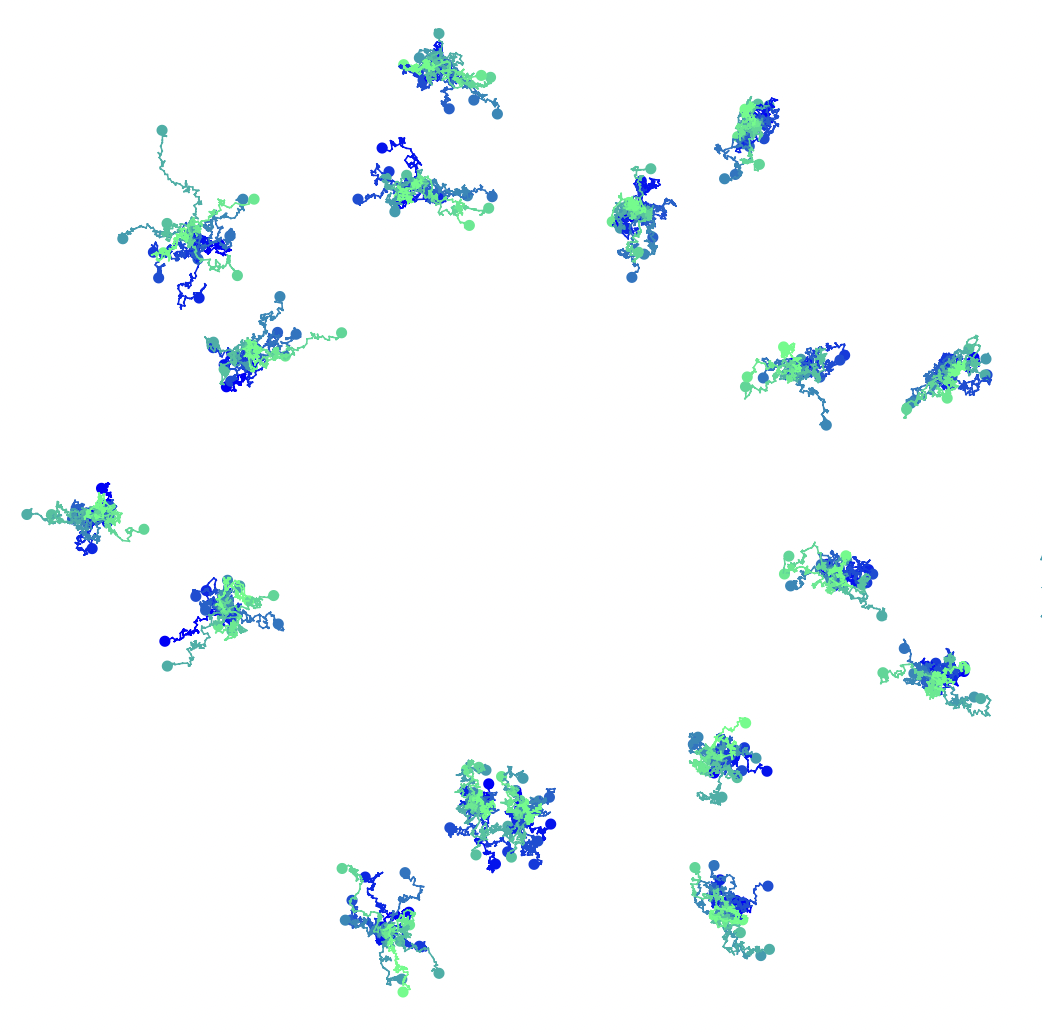
Brownian motion starting point
Sommer, Bronstein, TPAMI 2021; Jensen, Sommer, Algorithms 2022
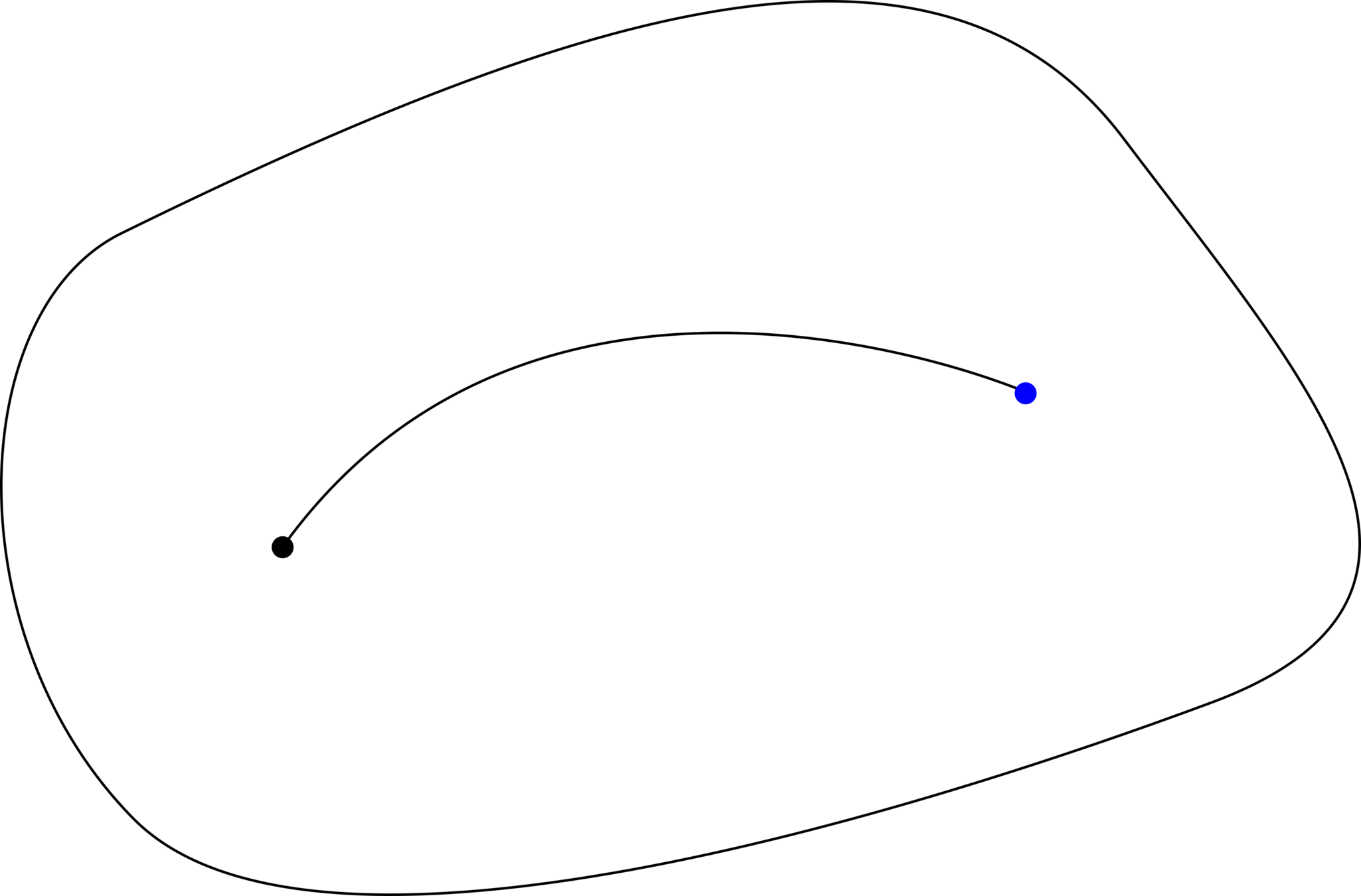
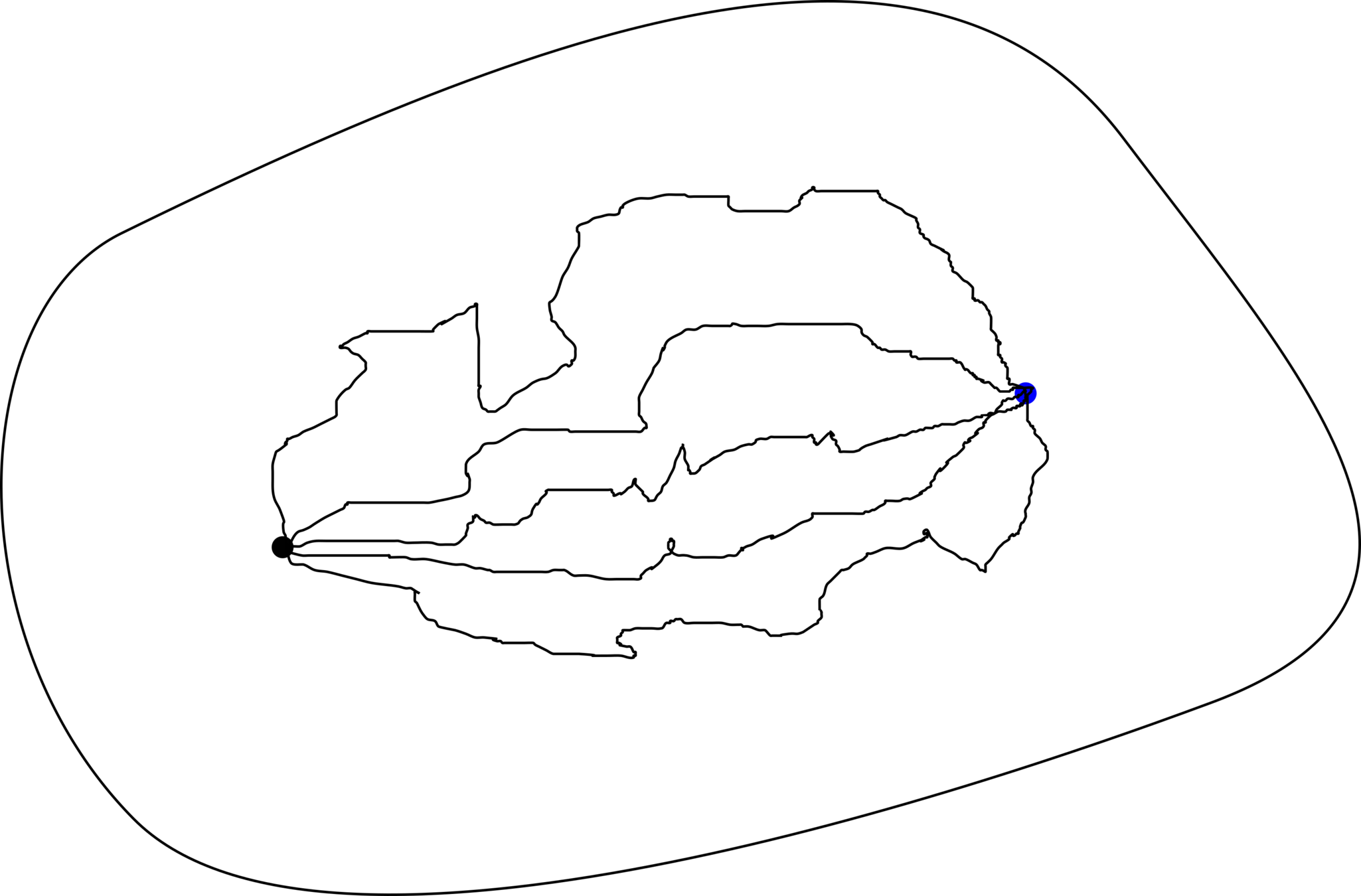
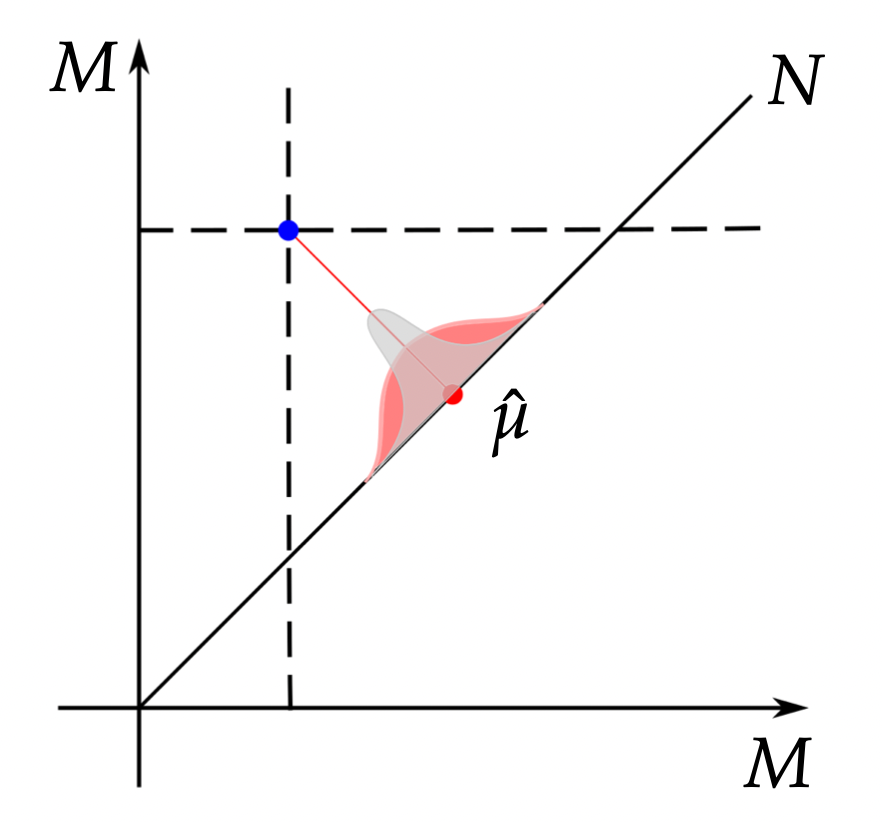
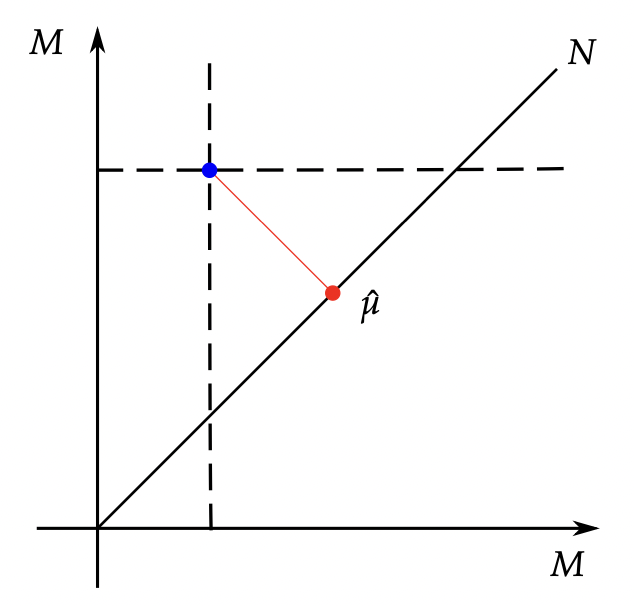
Fermi bridge:
Coordinate bridge:
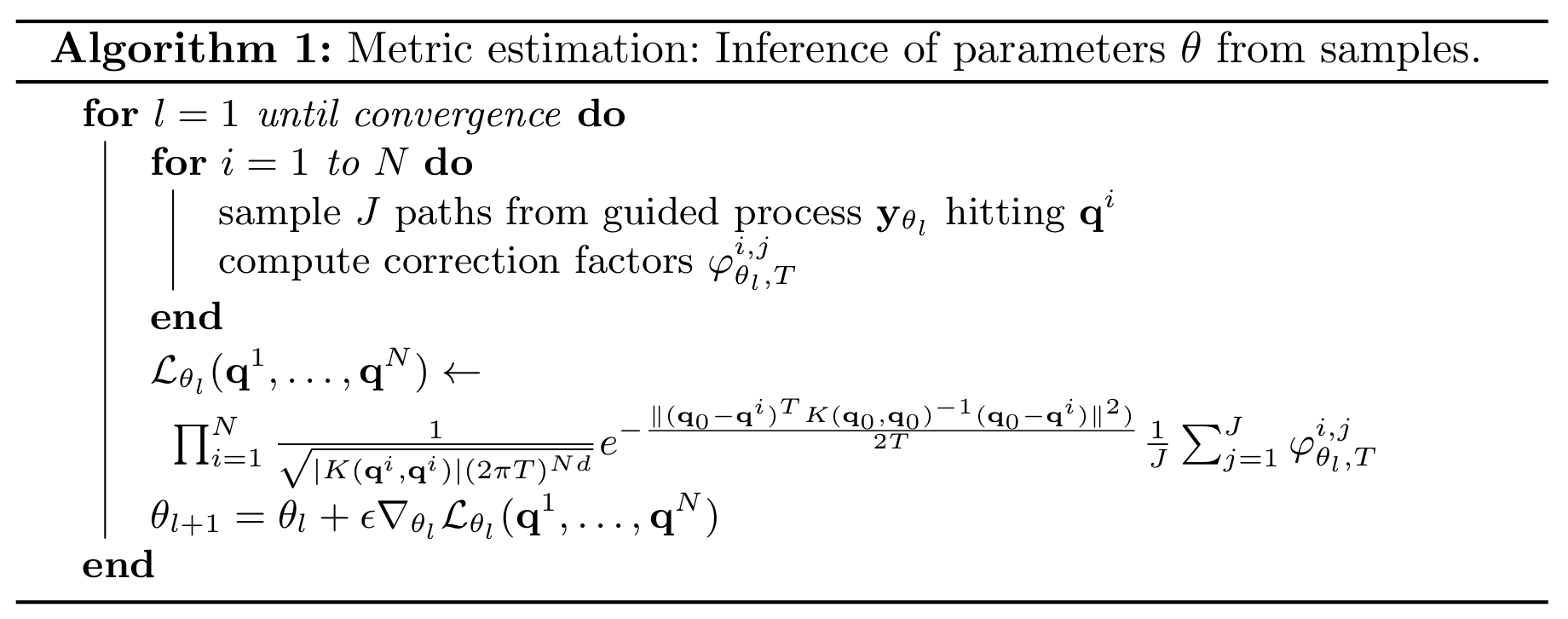
One (or few) forward samples - compared to nested optimization
Added variance on top of CLT - gain in computational speed
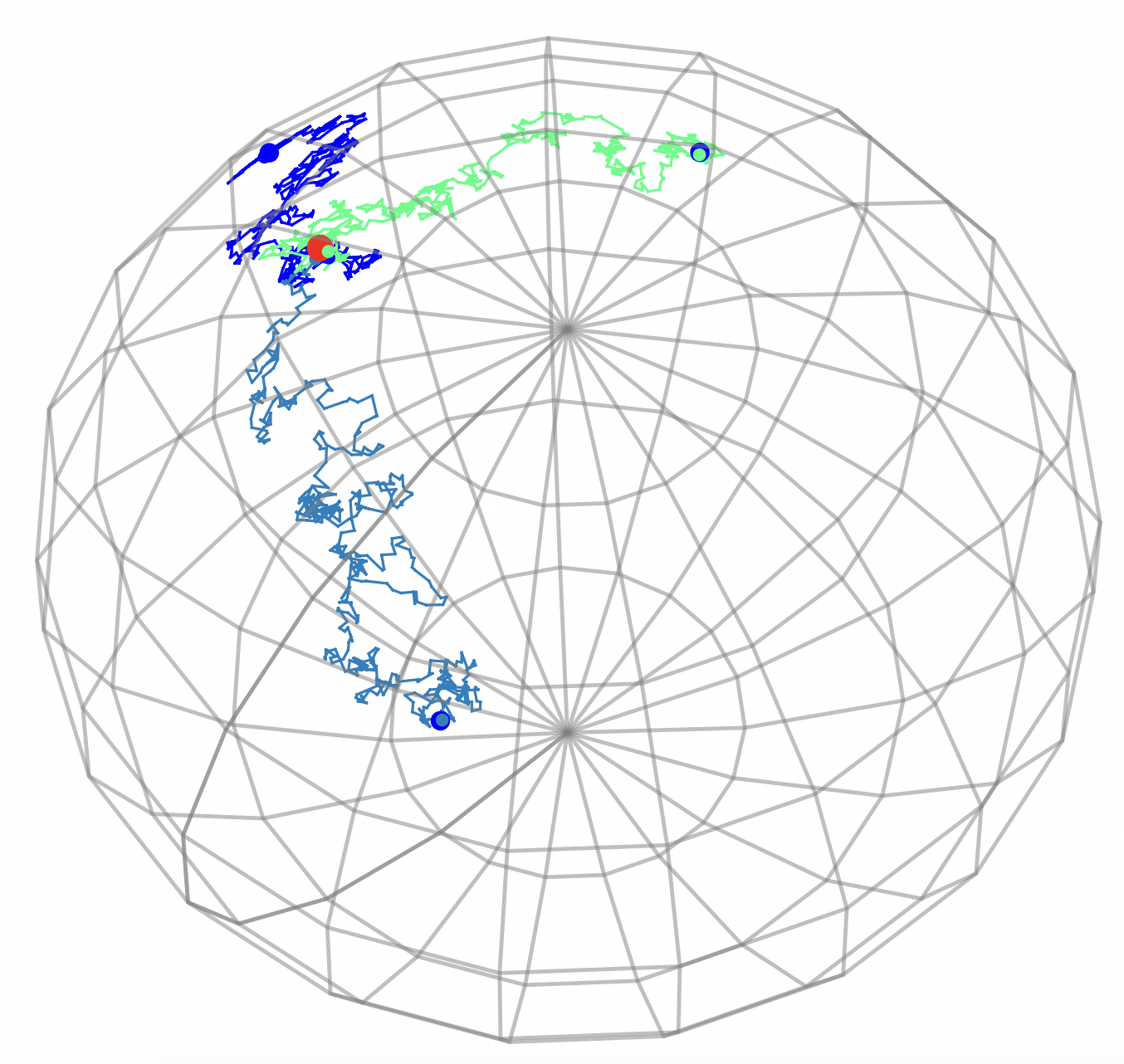
Diagonally conditioned process:
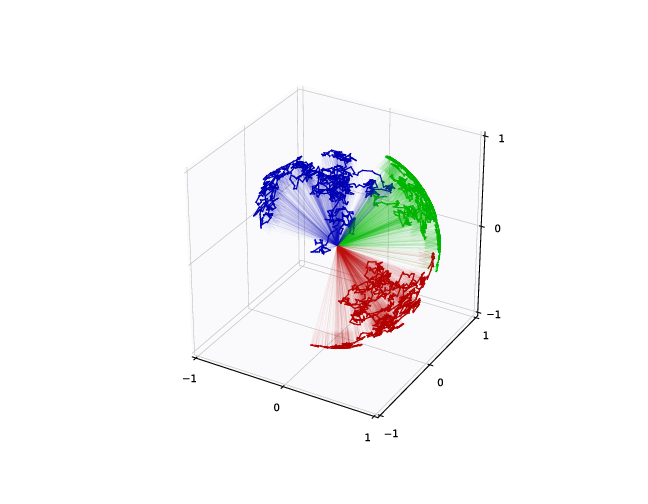
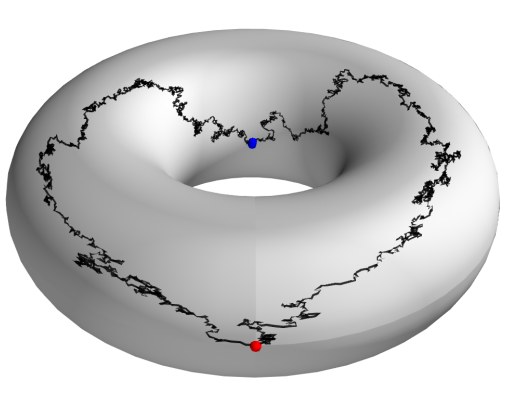
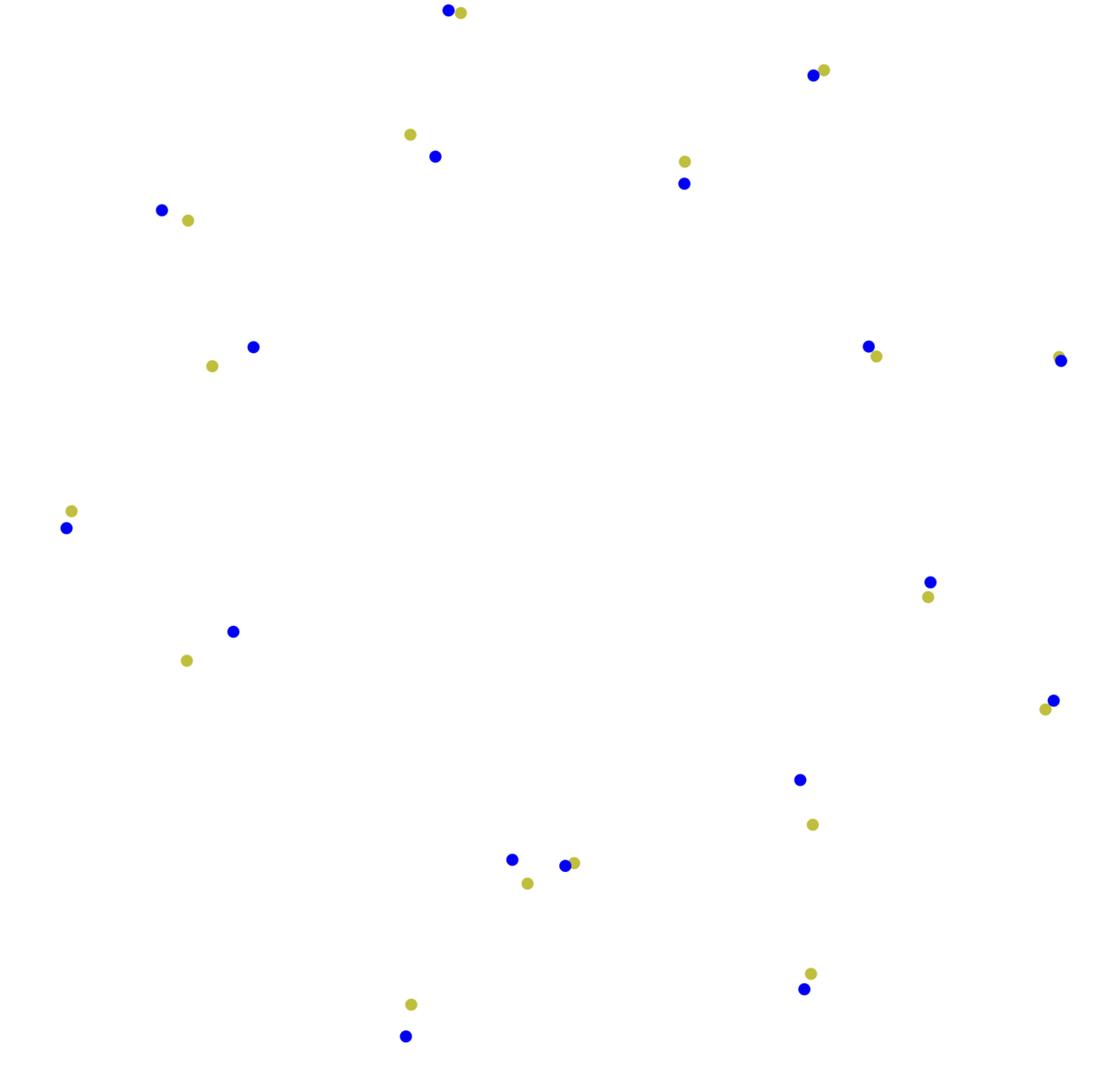
Frechet mean (green), diffusion mean (blue)
code: http://bitbucket.com/stefansommer/jaxgeometry
slides: https://slides.com/stefansommer
References:
Open phd/pd positions on shape stochastics and morphometry
By Stefan Sommer




