Movement-Related Potential
- MRPs are small and slow potential drift before a voluntary movement
- the potentials are different between left and right arm, so it's easy to distinguish left vs right movement intention.
- harder detection than alpha and beta rhythms
- however, can be more specific to supplementary and primary motor cortical areas
Experimentation
- Hiraiwa (1990)- backpropagation neural network to test voluntary utterance of vowels (a, e, i, o, u) and moving the joystick in 4 directions
- 53% patterns correctly classified for vowels, 96% patterns recognized by directions
- vowels require a higher level of cognitive activity, hence a harder pattern recognition
- asyncrhonous switch- BCI can detect from a user is idle to active control state
- low-frequency AS- record 1-4 Hz range
More Experimentation!
- Shenoy and Rao (2005) - dynamic Bayesian network
- probability distributions over brain and body-states during planning + execution
- continuous tracking, allows generation of control signals
- MRPs can estimate movement
Stimulus-Evoked Potentials
- stereotypical EEG responses but by specific stimuli
- rare stimulus triggers a P300 response (300 ms)
- The P300 response stimulus itself is unpredictable, but is always 300 ms after the stimulus.
- Generally in the parietal lobe, but sometimes certain components in the temporal and frontal lobes as well.
- oddball paradigm- spelling a word using a matrix of letters and are flashed in random orders.
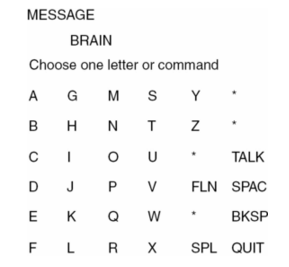
Every time a letter flashed, the brain will generate a P300 reponse.
Steady State Visually Evoked Potential
- detecting SSVEP caused by a continuously fluctuating stimuli (hence the name steady state)
- Ex: decoding one of two possible choices, these two choices can be represented by a light at different frequency. Then we can see the difference in stimuli.
- Each button was lit up at a different frequency ranging from 6-14 Hz. Therefore, decoding SSVEP is possible.
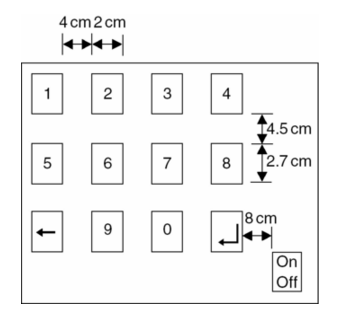
- 8 out of 13 subjects used SSVEP subject to type desire phone number. Avg: 27.15 bpm for ITR.
Auditory Evoked Potentials
- Donchin and colleagues- used P300 in spoken commands (yes, no, pass, and end), achieved accuracy in 63%-80% in 3 ALS pateitns
- Hill and colleagues (2005)- ICA with support vector machines. 50 ms square-wave beeps of different frequencies either on the left or right ear. Subjects count the amount of beep on the left or right side.
More on Auditory Evoked Potentials
- Furdea and colleagues: letters in matrix coded with acoustically presented numbers
- Less accurate than a visual BCI- Halder (2010) found that ITR has an avg of 2.46 bpm and accuracy around 78.5%.
- Only reliable to patients who have lost all motor function and have short attention spans.
BCIs based on Cognitive Tasks
- requires higher levels of thinking, but each cognitive task can be mapped to a control signal
- can discriminate between activity patterns of different tasks
- Anderson (1996)- (1) relax, (2) letter composition (3) math, (4) visual counting, (5) geometric figure
- EEG recorded from 10-20 system. Autoregressive model with two/three-layer backpropagation neural networks
BCIs based on Cognitive Tasks
- average accuracy ranged from 71% to 38%
- Galan (2008) - 3 mental tasks to operate simulated wheelchair along specified path. (1) mentally search for words, (2) relaxing while fixating on the center of screen, (3) motor imagery of left hand
- used LDA classifier. 100% and 80% (different subjects) of the final goals.
Error Potentials in BCIs
- error detection is very important
- detection is done by recognizing the brain's reaction to error: hence the error potential
- Buttfield (2006) - deliberately make 20% errors to record ErrPs from frontocentral region.
- with errors - accuracy 79.9%, without errors- accuracy 82.4%
Coadaptive BCI
- BCI can adapt to a user's brain signals continuously
- non-stationary learning task - continuously mapping brain signals to control signals
- 3-6 minutes of adaptation go a long way
- Buttfield (2006) - continuously adapting mean and covariance to calculate the learning rates and online adaptation is better than static (for up to 20.3%)
- DiGiovanna (2009) tried operant condition with BCI
Hierarchy BCI
- Continuous non-invasive BCI might be cognitively taxing
- hierarchical BCI - user teaches BCI system new skills, then invoked directly as high level command
- developed to control a humanoid robot
- hierarchical control is faster and more accurate
Other Non-Invasive BCIs
fMRI
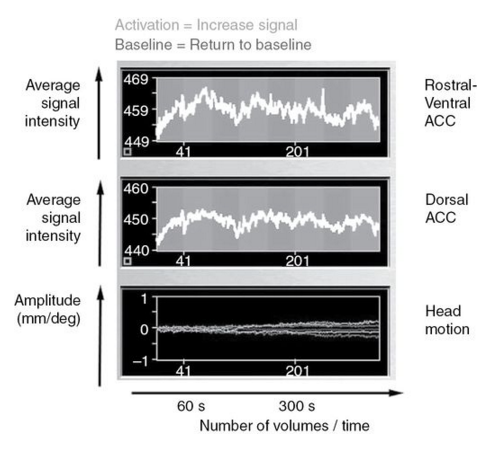
- Can a subject learn to control their blood oxygen level dependent (BOLD) response?
- Weiskopf (2003) - feedback paradigm- local BOLD signals constantly provided with a delay < 2 sec
- subjects can increase or decrease BOLD responses
Magnetoencephalography (MEG)
- higher spatiotemporal resolution than EEG
- Mellinger (2007) - investigated a MEG on voluntary amplitude modulation of sensorimotor mu and beta rhythm
- spatial filtering method based on geometric properties of signal propagation
- successfully communicate limb movements
fNIR
- captures hemodynamic response
- Coyle (2004) - fNIR detects characteristic repsonses when subjects engage in motor imagery and utilize this response to control an application
- easy for drawing and cursor control
- however, average completion time actually decreased with practice
BCI Chapter 9
By tsunwong625



