



















Vedant Puri
PhD student at Carnegie Mellon University
JUL 22, 2024
Vedant Puri, Aviral Prakash, Levent Burak Kara, Yongjie Jessica Zhang
Mechanical Engineering, Carnegie Mellon University
1
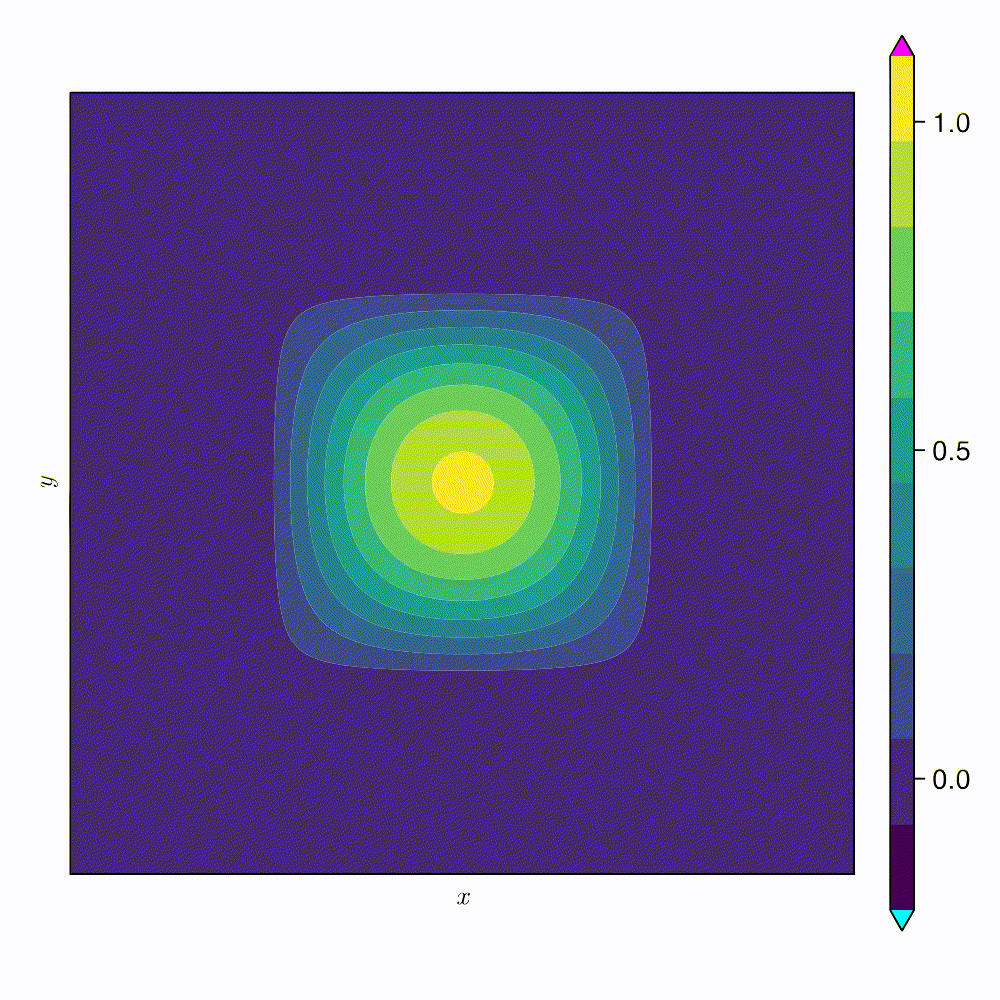
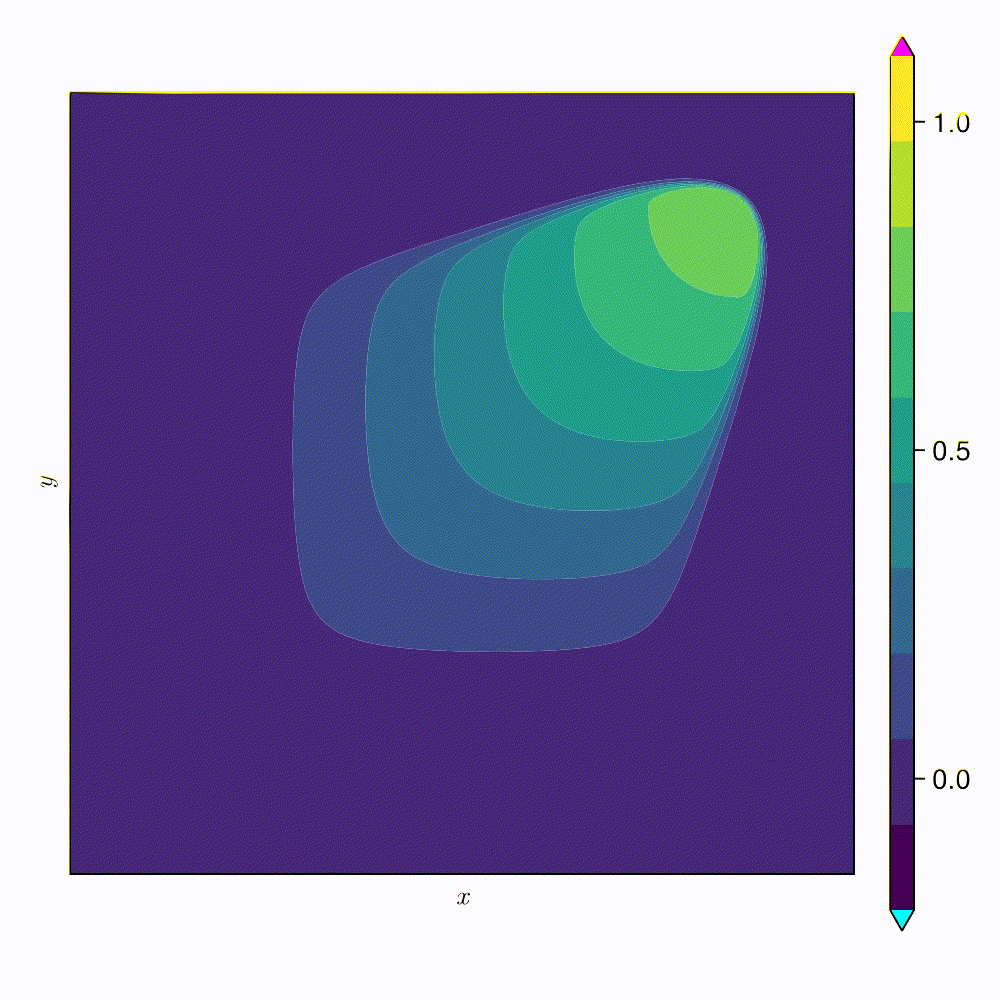
2D Viscous Burgers problem \( (\mathit{Re} = 1\text{k})\)
Nonlinear model order reduction
Full order model (FOM)
2
4
5
\(\text{Coordinates}\)
\(\text{Loss } (L)\)
\(\text{PDE Problem}\)
\((\boldsymbol{x}, t, \boldsymbol{\mu})\)
\(\text{ Parameters}\)
\( \text{and time}\)
\(\text{Smooth neural field MLP }(g_\theta)\)
\(\text{Backpropagation}\)
\(\text{ Intrinsic ROM manifold}\)
\(\tilde{u}\)
\(\boldsymbol{x}\)
\(\boldsymbol{u}\left( \boldsymbol{x}, t; \boldsymbol{\mu} \right)\)
\(\mathcal{\tilde{U}}\)
\(\nabla_\theta L\)
\(\nabla_\varrho L\)
\(\nabla_\theta L\)
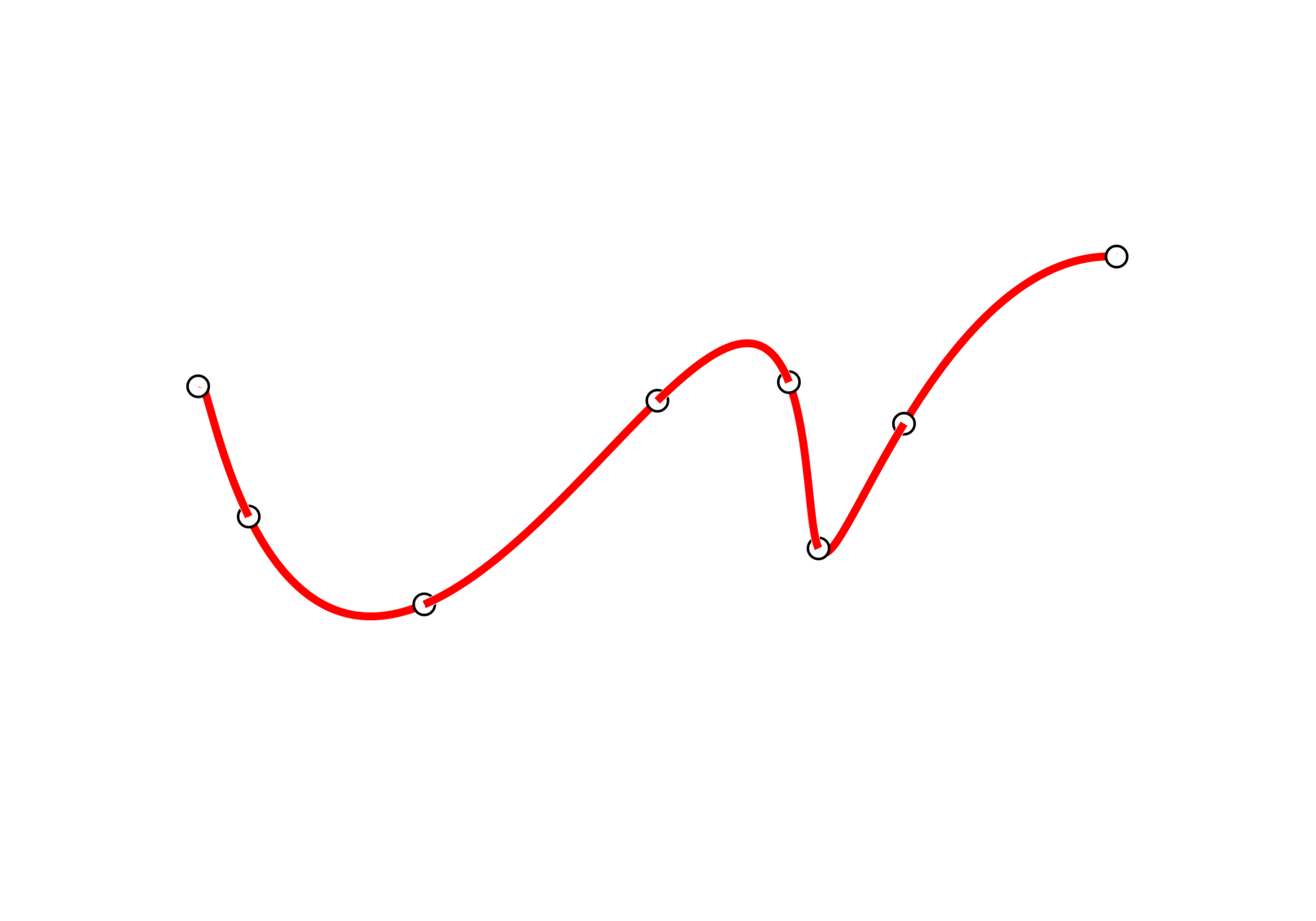
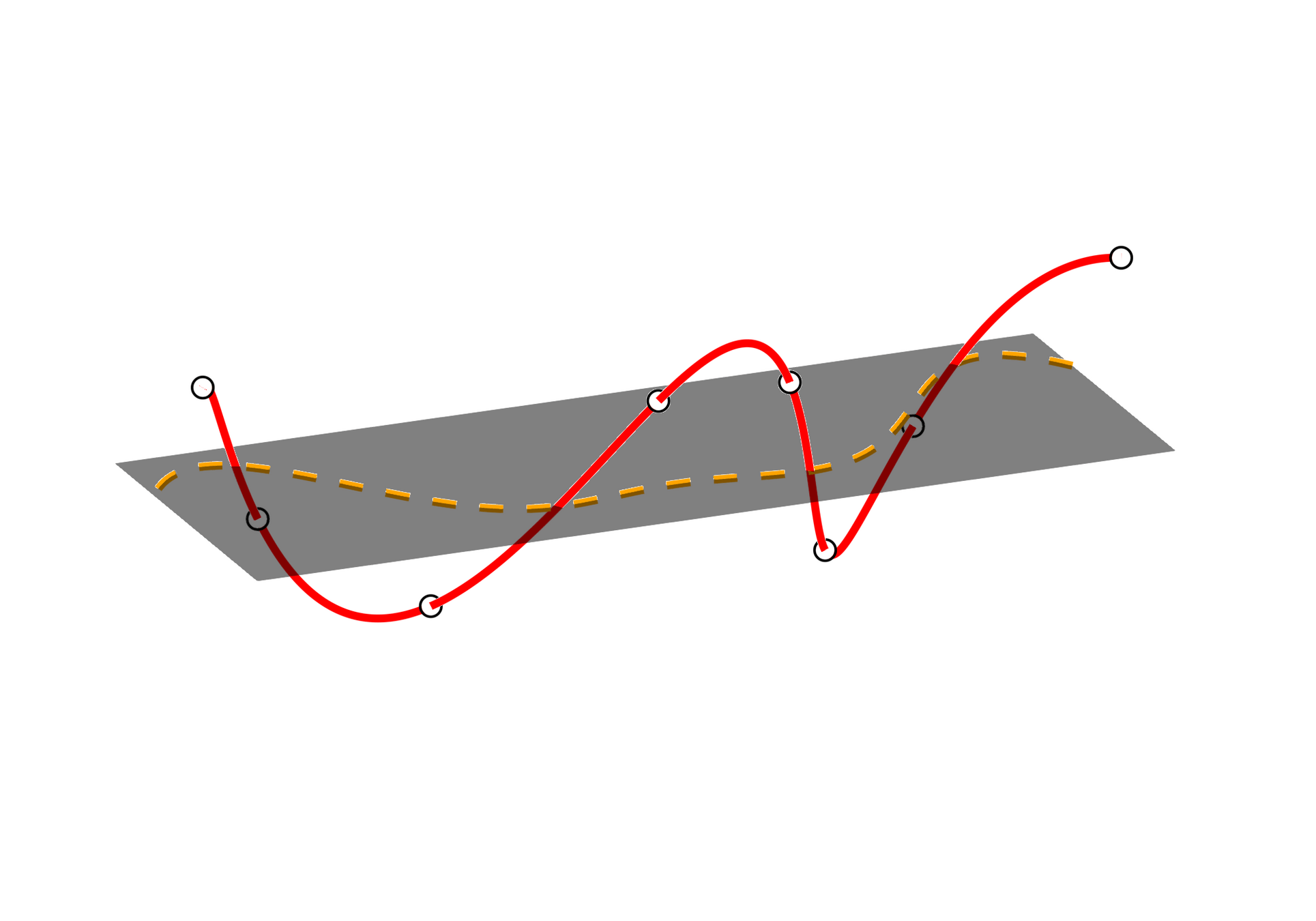
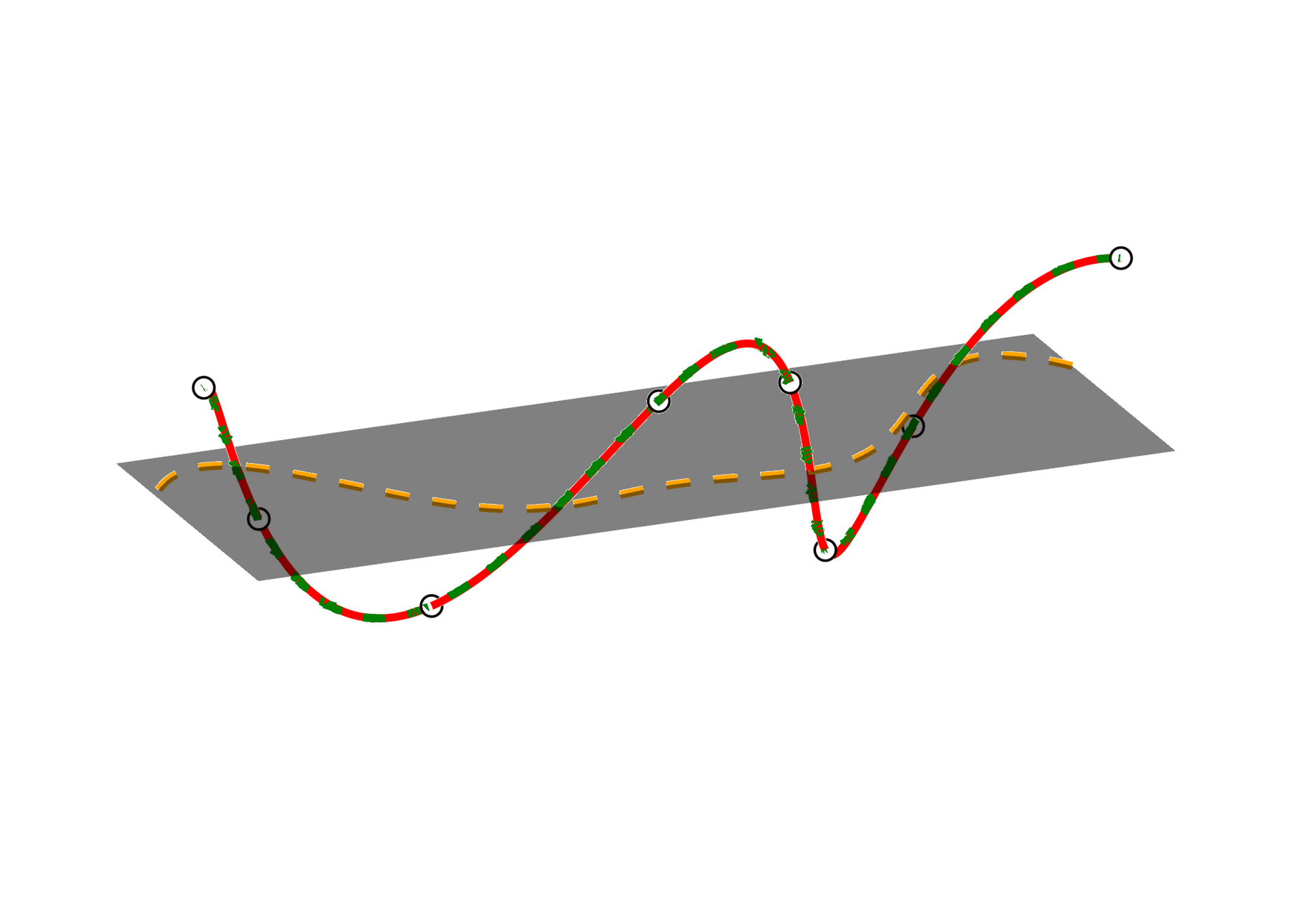
Modeling \(\tilde{\mathcal{U}}\) as a learnable function \(\Xi_\varrho\) restricts ROM states to follow a smooth trajectory.
8
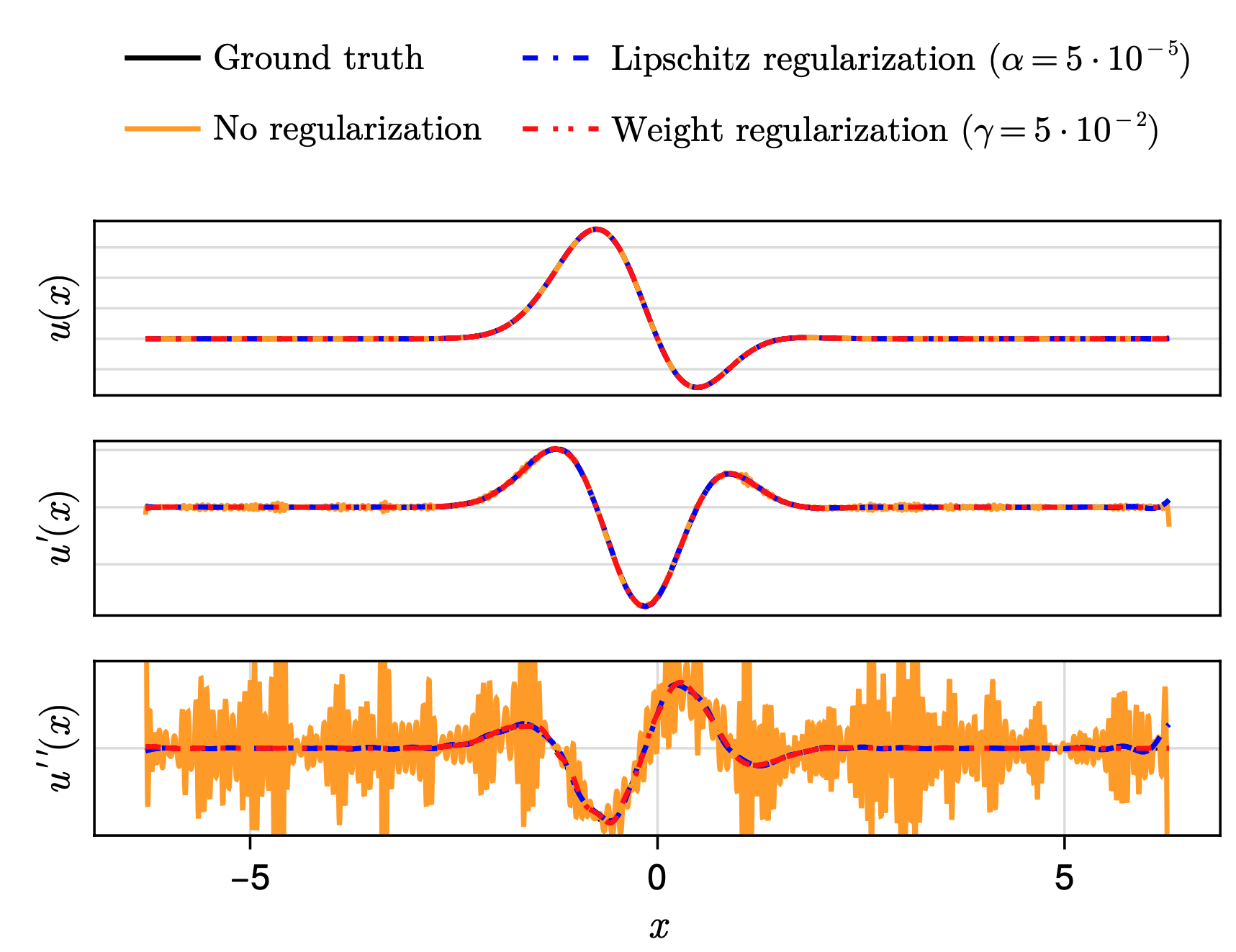
\(\text{Neural field MLP } (g_\theta)\)
\(\boldsymbol{x}\)
\(\boldsymbol{u}\left( \boldsymbol{x} \right)\)
Solution: Apply regularization to ensure that the learned neural field is inherently smooth
3
6
7
Smooth trajectory of ROM states allows for taking larger time-steps without sacrificing accuracy
\(\text{Predictions}\)
\(\text{Relative error } (\Delta t = \Delta t_0)\)
\(\text{Relative error } (\Delta t = 10\Delta t_0)\)
\(\text{CAE-ROM}\)
\(\text{SNFL-ROM}\)
\(\text{SNFW-ROM}\)
9
\(\text{Predictions}\)
\(\text{Relative error } (\Delta t = \Delta t_0)\)
\(\text{Relative error } (\Delta t = 10\Delta t_0)\)
10
AB
Scan QR code to access project website
10
\(\text{Predictions}\)
\(\mu = 0.600 \text{ (training)}\)
\(\mu = 0.575 \text{ (inteprolation)}\)
\(\mu = 625 \text{ (extrapolation)}\)
\(\text{CAE-ROM}\)
\(\text{SNFL-ROM}\)
\(\text{SNFW-ROM}\)
1
1
1
Notes
By Vedant Puri
Presented at WCCM 2024




