Procurando por
Tamanhos de Passo por Coordenada Ótimos com
Victor Sanches Portella
Abril 2025
ime.usp.br/~victorsp
junto de Frederik Kunstner, Nick Harvey, e Mark Schmidt
Multidimensional Backtracking



Unicamp,

Who am I?
Postdoc at USP
ML Theory
Optimization
Randomized Algs
Optimization


p_t
1 - p_t

My interests according to a student:
"Crazy Algorithms"
Gradient Descent and Line Search
Why first-order optimization?
Training/Fitting a ML model is often cast a (uncontrained) optimization problem
Usually in ML, models tend to be BIG
\displaystyle \min_{x \in \mathbb{R}^{d}}~f(x)
\(d\) is BIG
First-order (i.e., gradient based) methods fit the bill
(stochastic even more so)
\(O(d)\) time and space per iteration is preferable
Convex Optimization Setting
\(f\) is convex
Not the case with Neural Networks
Still quite useful in theory and practice
\displaystyle \Bigg\{
More conditions on \(f\) for rates of convergence
\(L\)-smooth
\displaystyle \min_{x \in \mathbb{R}^{d}}~f(x)
\(\mu\)-strongly convex



\preceq \nabla^2 f(x) \preceq
L \cdot I
\mu \cdot I
"Easy to optimize"
Gradient Descent
\displaystyle x_{t+1} = x_t - \alpha \nabla f(x_t)
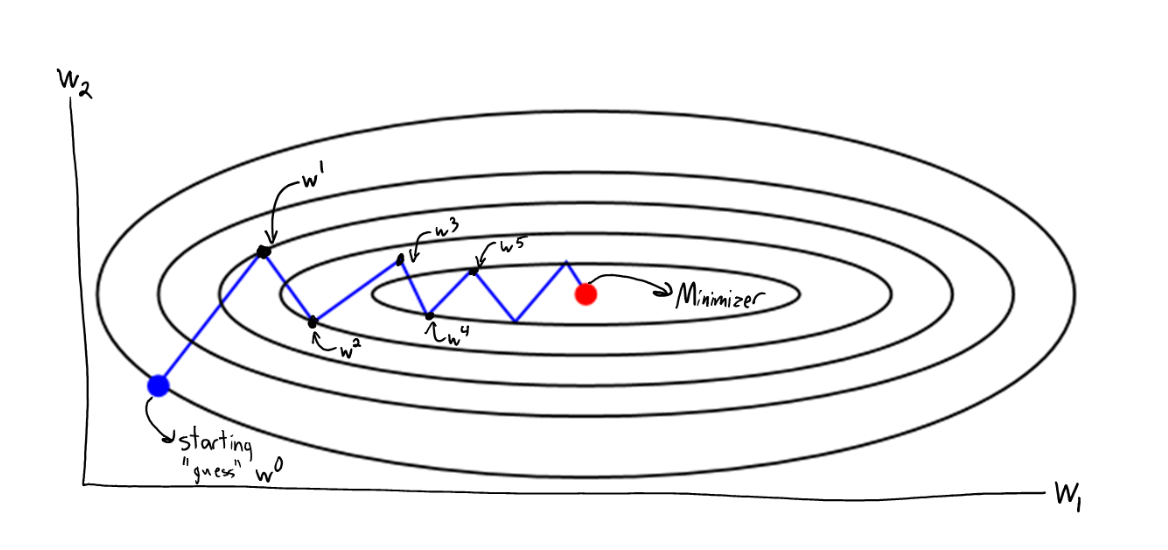
Which step-size \(\alpha\) should we pick?
\displaystyle \implies
\displaystyle f(x_t) - f(x_*) \leq \left( 1 - \frac{\mu}{L} \right)^t (f(x_0) - f(x_*))
Condition number
\displaystyle \alpha = \frac{1}{L}
\displaystyle \kappa = \frac{L}{\mu}
\(\kappa\) Big \(\implies\) hard function
What Step-Size to Pick?
If we know \(L\), picking \(1/L\) always works
and is optimal
What if we do not know \(L\)?
\displaystyle x_{t+1} = x_t - \tfrac{1}{L} \nabla f(x_t)
\displaystyle f(x_{t+1}) \leq f(x_t) - \tfrac{1}{L} \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_2^2
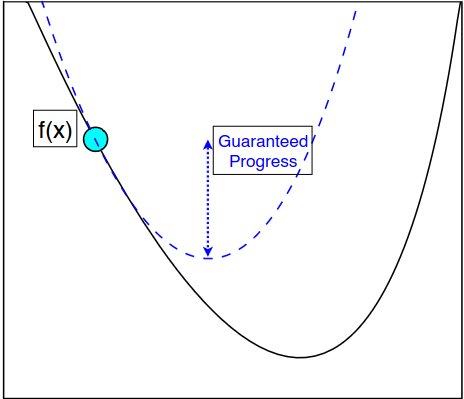
"Descent Lemma"
Idea: Pick \(\eta\) big and see if the "descent condition" holds
(Locally \(1/\eta\)-smooth)
worst-case
Backtracking Line Search
Line-search: test if step-size \(\alpha_{\max}/2\) makes enough progress:
\displaystyle f(x_{t+1}) \leq f(x_t) - \alpha_{\max} \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_2^2
Armijo condition
If this fails, cut out everything bigger than \(\alpha_{\max}/2\)
0
\alpha_{0}
\tfrac{\alpha_{0}}{2}
\tfrac{1}{L}
\tfrac{\alpha_{0}}{4}
Backtracking Line-Search
Backtracking Line-Search
Start with \(\alpha_{\max} > 2 L\)
\(\alpha \gets \alpha_{\max}/2\)
If
\displaystyle f(x_{t+1}) \leq f(x_t) - \alpha \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_2^2
\(t \gets t+1\)
Else
While \(t \leq T\)
\displaystyle \alpha_{\max} \gets \alpha_{\max}/2
Halve candidate space
Guarantee: step-size will be at least \(\tfrac{1}{2} \cdot \tfrac{1}{L}\)
Makes enough progress?
Beyond Line-Search?
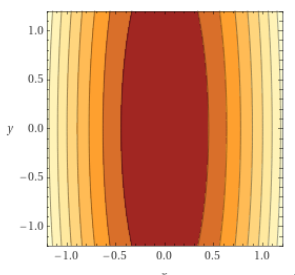
\displaystyle f(x) = x^T A x
\displaystyle A =
\begin{pmatrix}
1000 & 0 \\
0 & 0.001
\end{pmatrix}
\displaystyle \kappa = 10^{-6}
\displaystyle x_{t+1} = x_t -
\begin{pmatrix}
0.001 & 0 \\
0 & 1000
\end{pmatrix}
\nabla f(x_t)
Converges in 1 step
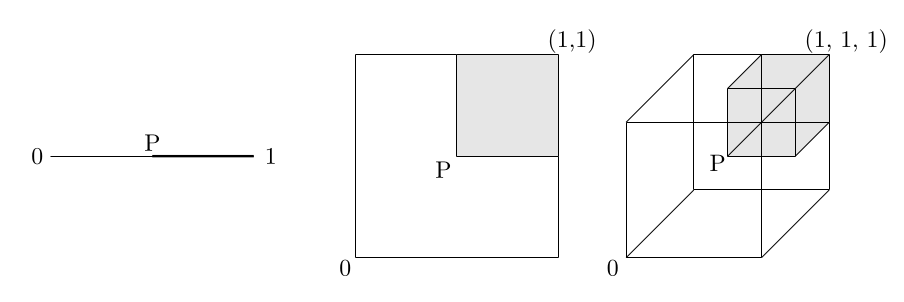
\(P\)
Can we find a good \(P\) automatically?
"Adapt to \(f\)"
Preconditioer \(P\)
"Adaptive" Optimization Methods

Second-order Methods
P_t = \nabla^2 f(x_t)
Newton's method
is usually a great preconditioner
Superlinear convergence
...when \(\lVert x_t - x_*\rVert\) small
Newton may diverge otherwise
Using step-size with Newton and QN method ensures convergence away from \(x_*\)
Worse than GD
\displaystyle f(x_t) - f(x_*) \leq \left( 1 - \frac{1}{\kappa^2} \right)^t (f(x_0) - f(x_*))
\displaystyle \phantom{\kappa}^2
\(\nabla^2 f(x)\) is usually expensive to compute
P_t \approx \nabla^2 f(x_t)
should also help
Quasi-Newton Methods, e.g. BFGS
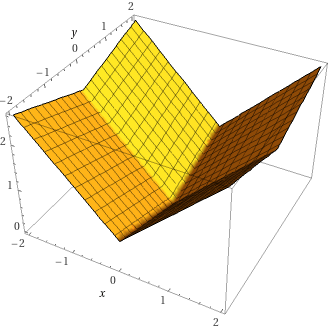
Non-Smooth (why?) Optimization
Toy Problem: Minimizing the absolute value function
Adaptivity in Online Learning
\displaystyle x_{t+1} = x_t - P_t \cdot \nabla f(x_t)
Preconditioner at round \(t\)
AdaGrad from Online Learning
\displaystyle P_t = \mathrm{Diag}\Big( \sum_{i \leq t} \nabla f(x_i) \nabla f(x_i)^T \Big)^{-1/2}
Convergence guarantees
"adapt" to the function itself
Attains linear rate in classical convex opt (proved later)
But... Online Learning is too adversarial, AdaGrad is "conservative"
Also... "approximates the Hessian" is not quite true
"Fixing" AdaGrad
But... Online Learning is too adversarial, AdaGrad is "conservative"
"Fixes": Adam, RMSProp, and other workarounds
\displaystyle G_t = (1 - \rho) \cdot \nabla f(x_i) \nabla f(x_i)^T + \rho \cdot G_{t-1}
\displaystyle P_t = G_t^{-1/2}
RMSProp
Adam
Uses "momentum" (weighted sum of gradients)
Similar preconditioner to the above
"Fixing" AdaGrad
"AdaGrad inspired an incredible number of clones, most of them with similar, worse, or no regret guarantees.(...) Nowadays, [adaptive] seems to denote any kind of coordinate-wise learning rates that does not guarantee anything in particular."
Francesco Orabona in "A Modern Introduction to Online Learning", Sec. 4.3
Hypergradient Methods
Idea: look at step-size/preconditioner choice as an optimization problem
Gradient descent on the hyperparameters
How to pick the step-size of this? Well...
Little/ No theory
Unpredictable
... and popular?!
State of Affairs
What does it mean for a method to be adaptive?
(Quasi-)Newton Methods
\displaystyle \Bigg \{
Super-linear convergence close to opt
May need 2nd-order information.
Hypergradient Methods
Hyperparameter tuning as an opt problem
Unstable and no theory/guarantees
\displaystyle \Bigg \{
Online Learning
Formally adapts to adversarial and changing inputs
\displaystyle \Bigg \{
Too conservative in this case (e.g., AdaGrad)
"Fixes" (e.g., Adam) have few guarantees
State of Affairs
adaptive methods
f(x_t) - f(x_*) \displaystyle \lesssim \left( 1 - O\Big(\frac{1}{\kappa}\Big) \right)^t
only guarantee (globally)
In Smooth
and Strongly Convex optimization,
Should be better if there is a good Preconditioner \(P\)
Online Learning
Smooth Optimization
1 step-size
\(d\) step-sizes
(diagonal preconditioner )
Backtracking Line-search
Diagonal AdaGrad
Multidimensional Backtracking
Scalar AdaGrad
(and others)
(and others)
(non-smooth optmization)
Preconditioner Search
Optimal (Diagonal) Preconditioner
\displaystyle \frac{1}{\kappa} P^{-1} \preceq \nabla^2 f(x) \preceq P^{-1}
Optimal step-size: biggest that guarantees progress
Optimal preconditioner: biggest (??) that guarantees progress
\displaystyle P = \tfrac{1}{L} I
\displaystyle \kappa = \tfrac{L}{\mu}
\(L\)-smooth
\(\mu\)-strongly convex
\(f\) is
and
\preceq \nabla^2 f(x) \preceq
L \cdot I
\mu \cdot I
Optimal Diagonal Preconditioner
\(\kappa_* \leq \kappa\), hopefully \(\kappa_* \ll \kappa\)
Over diagonal matrices
\displaystyle P_*
minimizes \(\kappa_*\) such that
\displaystyle \frac{1}{\kappa_*} P^{-1} \preceq \nabla^2 f(x) \preceq P^{-1}
Optimal (Diagonal) Preconditioner
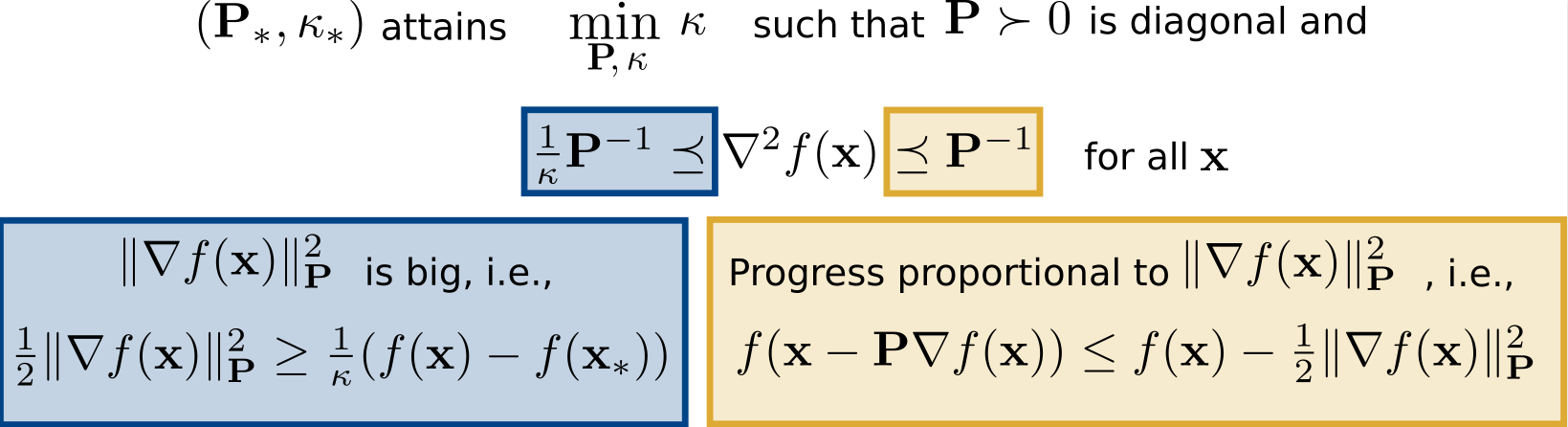
\displaystyle P_*, \kappa_*
attain
From Line-search to Preconditioner Search
Line-search
\displaystyle \Bigg\{
Worth it if \(\sqrt{2d} \kappa_* \ll 2 \kappa\)
\displaystyle f(x_t) - f(x_*) \leq\Big(1 - \phantom{\frac{1}{2}} \cdot \frac{1}{\kappa}\Big)^t (f(x_0) - f(x_*))
\displaystyle
\frac{1}{2}
Multidimensional Backtracking
\displaystyle \Bigg\{
(our algorithm)
# backtracks \(\lesssim\)
\displaystyle d \cdot \log\Big( \alpha_0 \cdot L\Big)
\displaystyle f(x_t) - f(x_*) \leq\Big(1 - \phantom{\frac{1}{\sqrt{2d}}} \cdot \frac{1}{\phantom{\kappa_*}}\Big)^t (f(x_0) - f(x_*))
\displaystyle\frac{1}{\sqrt{2d}}
\displaystyle \kappa_*
# backtracks \(\leq\)
\displaystyle \log\Big(\alpha_{0} \cdot L \Big)
Multidimensional Backtracking
Why Naive Search does not Work
Line-search: test if step-size \(\alpha_{\max}/2\) makes enough progress:
\displaystyle f(x_{t+1}) \leq f(x_t) - \alpha_{\max} \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_2^2
Armijo condition
If this fails, cut out everything bigger than \(\alpha_{\max}/2\)
Preconditioner search:
0
\alpha_{0}
\tfrac{\alpha_{0}}{2}
\tfrac{1}{L}
\tfrac{\alpha_{0}}{4}
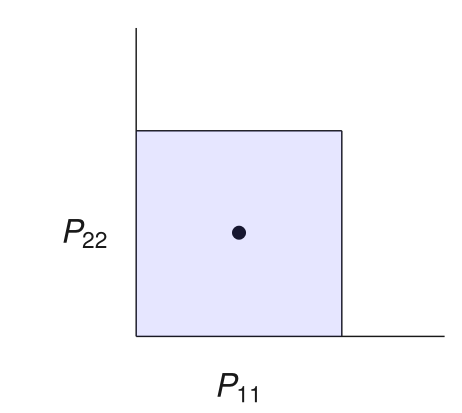
Test if preconditioner \(P\) makes enough progress:
Candidate preconditioners \(\mathcal{S}\): diagonals in a box
\displaystyle f(x_{t+1}) \leq f(x_t)
- \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_P^2
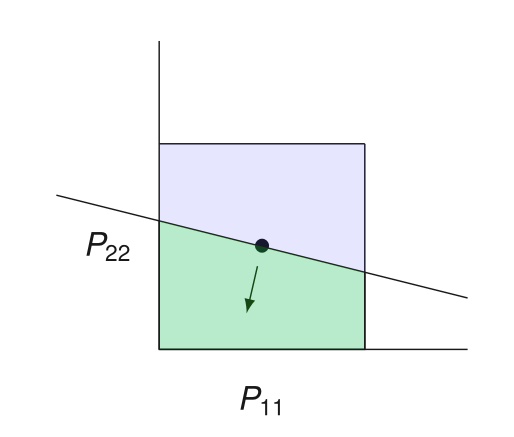
If this fails, cut out everything bigger than \(P\)
\langle \nabla f(x_t), P \nabla f(x_t) \rangle
Why Naive Search does not Work
Preconditioner search:
Test if preconditioner \(P\) makes enough progress:
Candidate preconditioners \(\mathcal{S}\): diagonals in a box
\displaystyle f(x_{t+1}) \leq f(x_t)
\langle \nabla f(x_t), P \nabla f(x_t) \rangle
- \tfrac{1}{2} \lVert \nabla f(x_t) \rVert_P^2
If this fails, cut out everything bigger than \(P\)
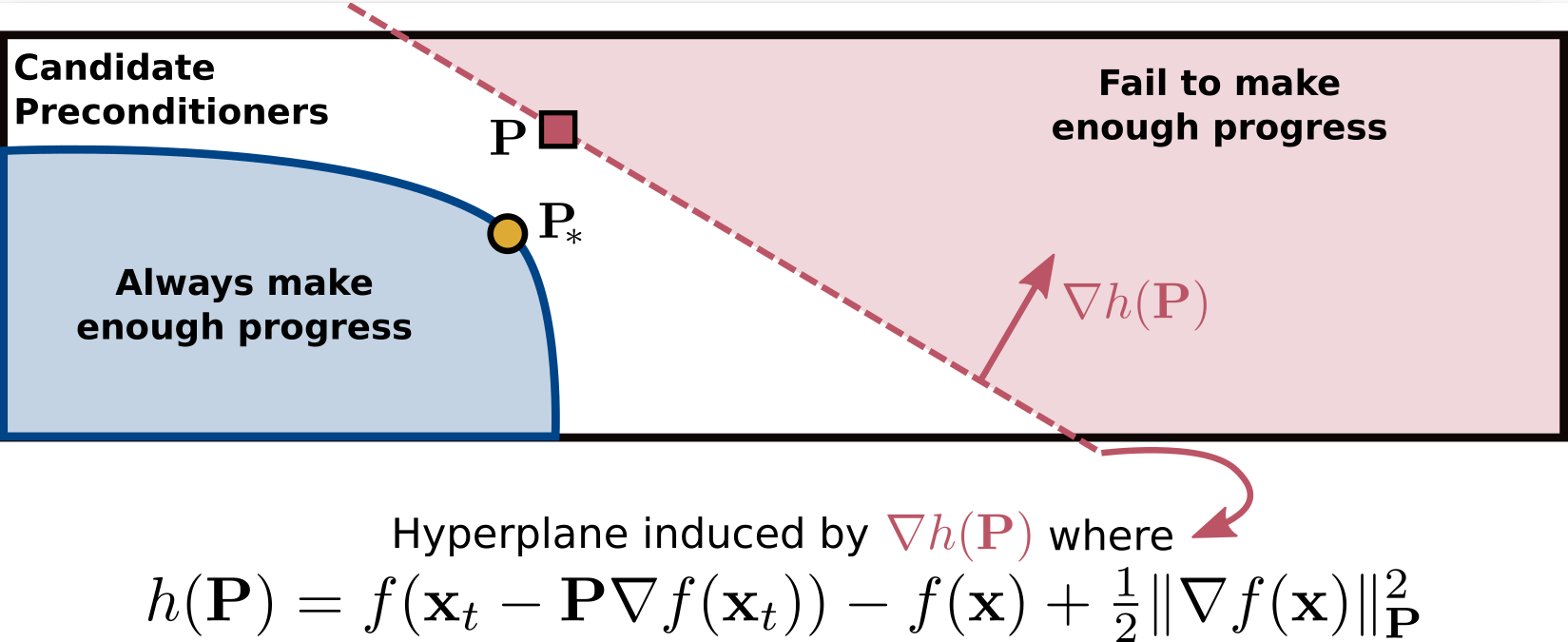
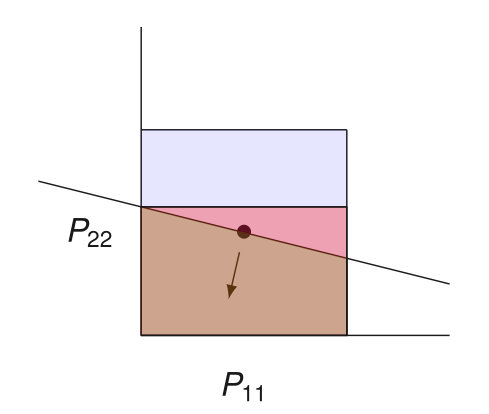
Convexity to the Rescue
\(P\) does not yield sufficient progress
Which preconditioners can be thrown out?
All \(Q\) such that \(P \preceq Q\) works, but it is too weak
\displaystyle
h(P) \coloneqq f(x - P^{-1} \nabla f(x)) - f(x) + \tfrac{1}{2} \lVert \nabla f(x) \rVert_P^2
\(P \) does not yield sufficient progress \(\iff\) \(h(P) > 0\)
\displaystyle
h(Q) \geq h(P) + \langle \nabla h(P), Q - P \rangle
Convexity \(\implies\)
\displaystyle
h(P) + \langle \nabla h(P), Q - P \rangle > 0
\(\implies\) \(Q\) is invalid
A separating hyperplane!
\(P\) in this half-space
\displaystyle \Bigg\{
Convexity to the Rescue
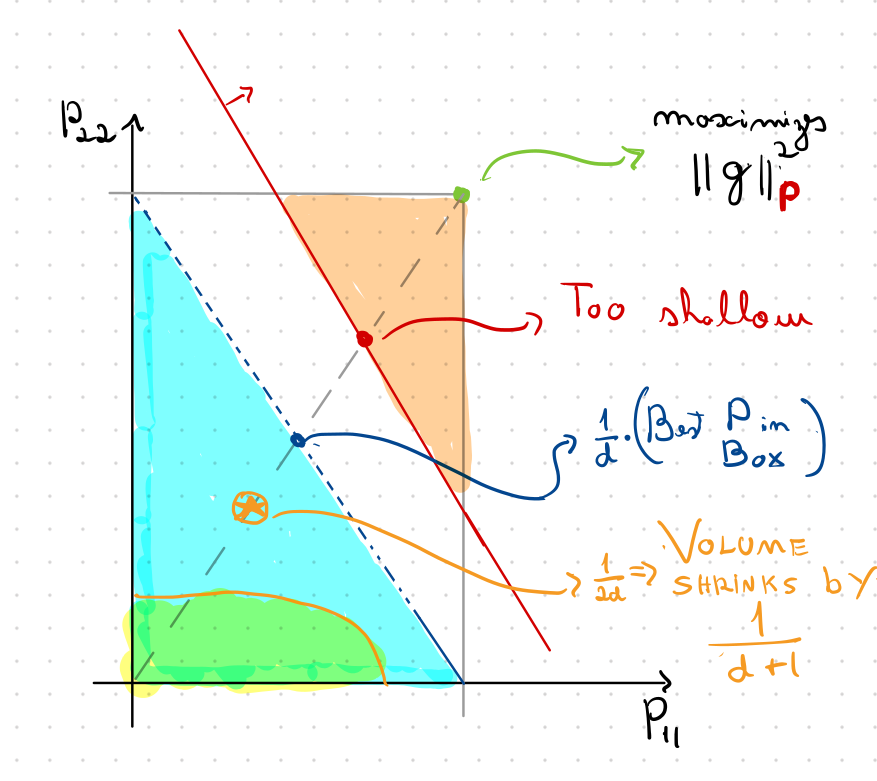
Box as Feasible Sets
How Deep to Query?

that maximizes
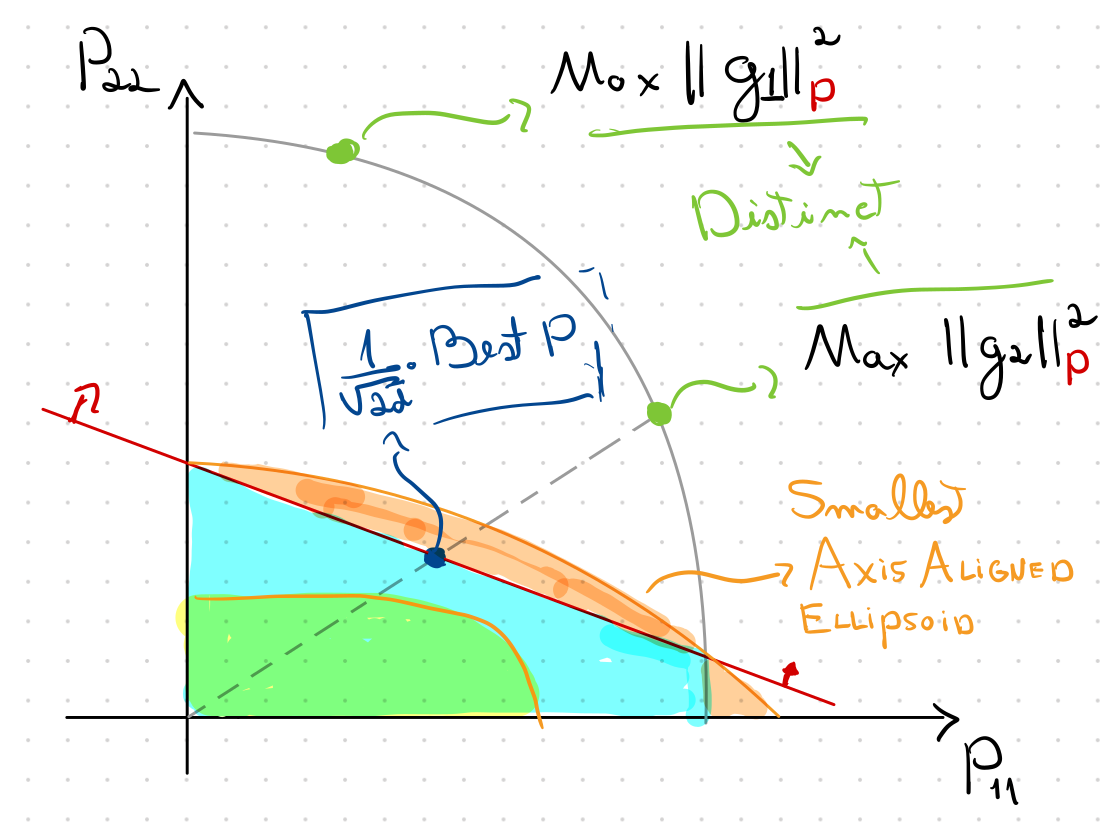
Ellipsoid Method to the Rescue
that maximizes

Ellipsoid Method to the Rescue
We want to use the Ellipsoid method as our cutting plane method
\(\Omega(d^3)\) time per iteration
We can exploit symmetry!
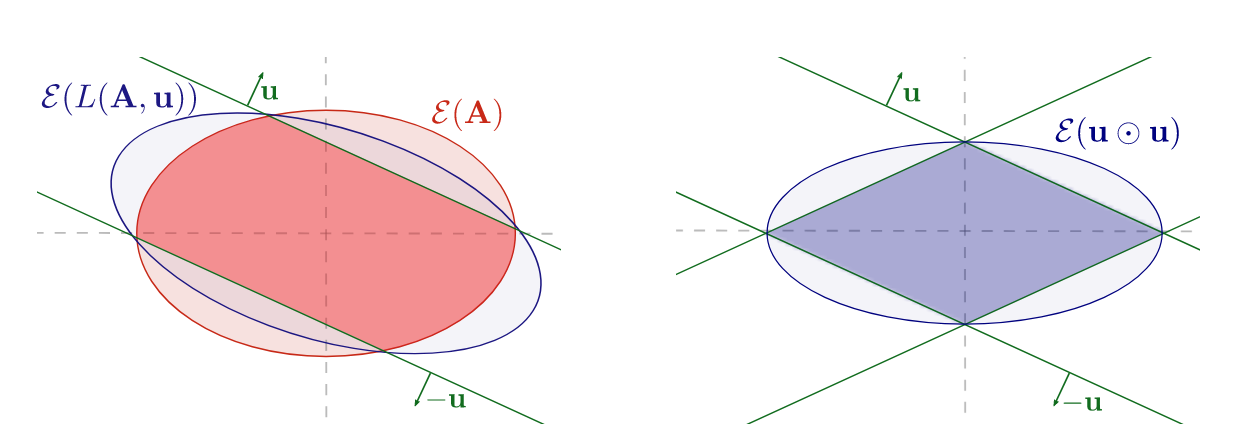
\(O(d)\) time per iteration
Constant volume decrease on each CUT
\displaystyle f(x_t) - f(x_*) \lesssim\Big(1 - \phantom{\frac{1}{\sqrt{2d}}} \cdot \frac{1}{\kappa_*}\Big)^t
\displaystyle
\frac{1}{\sqrt{2d}}
Query point \(1/\sqrt{2d}\) away from boundary
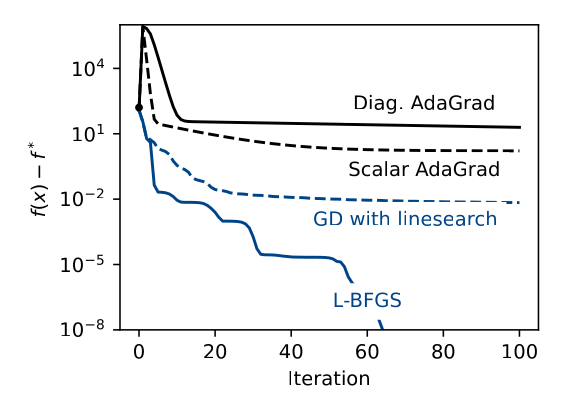
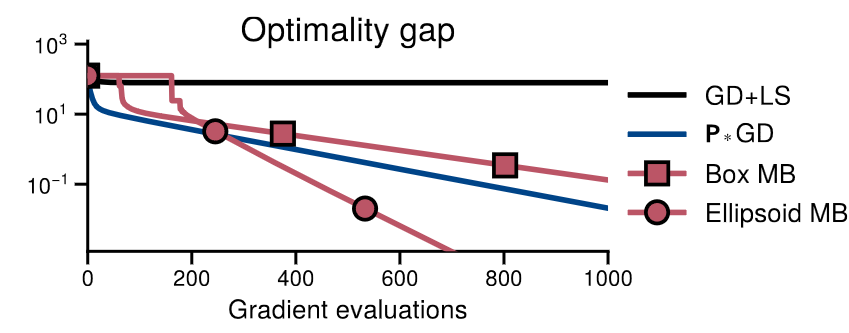
Experiments
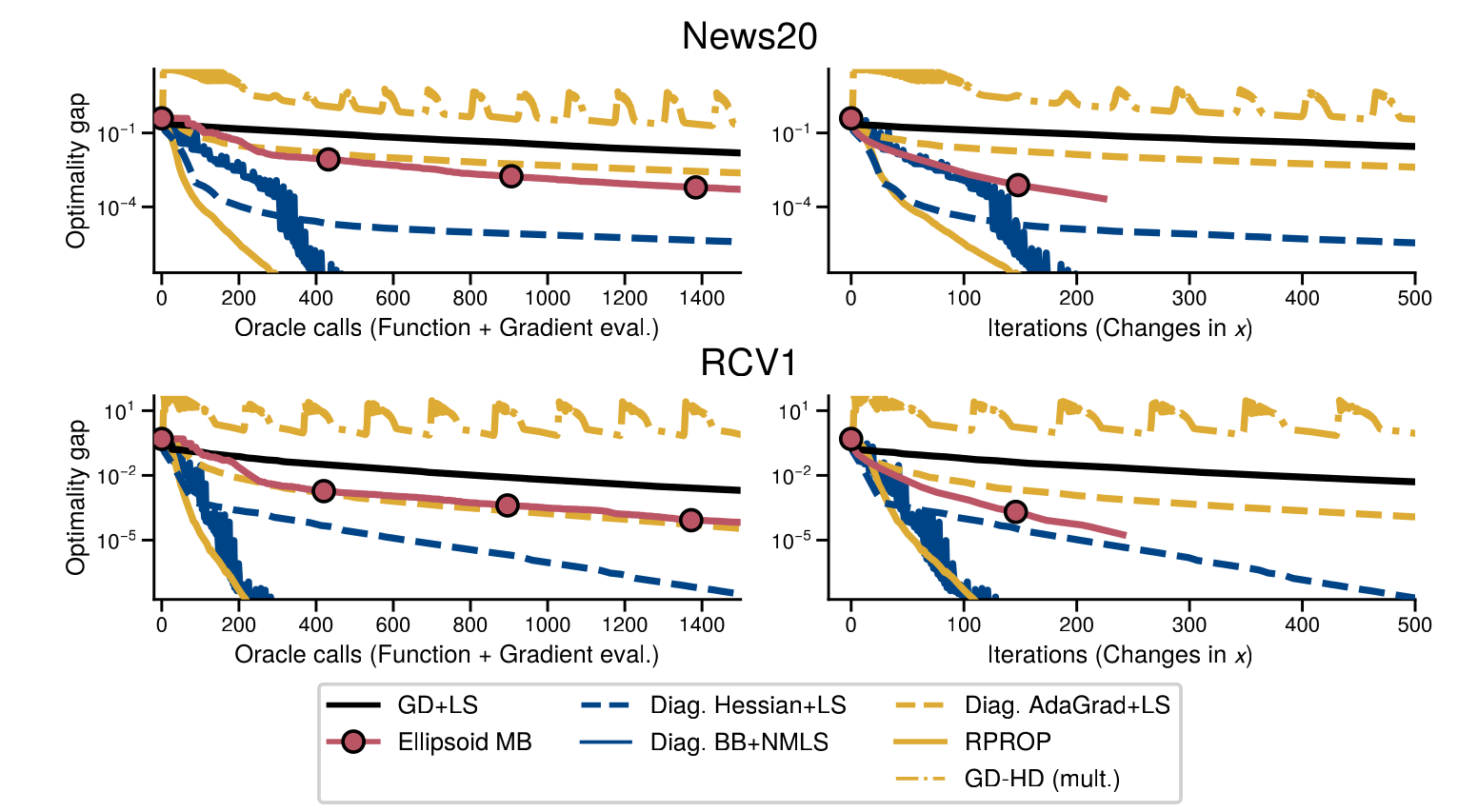
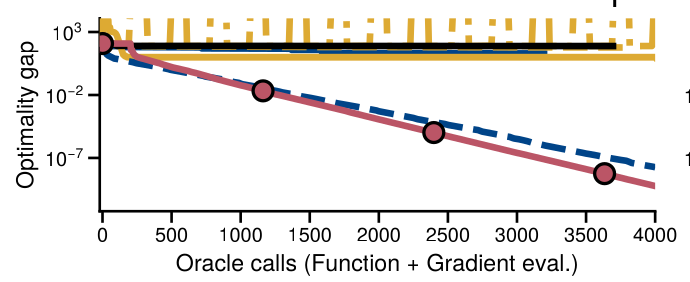
\kappa \approx 10^{13}
\kappa_* \approx 10^{2}
Experiments
Conclusions
Theoretically principled adaptive optimization method for strongly convex smooth optimization
A theoretically-informed use of "hypergradients"
ML Optimization meets Cutting Plane methods
Stochastic case?
Heuristics for non-convex case?
Other cutting-plane methods?
?
?
?
Thanks!
Backup Slides
How Deep to Query?
Ellipsoid Method to the Rescue
Preconditioner Search - 1hr Talk
By Victor Sanches Portella




