June 8, 2026
Adam Wei
Ambient Diffusion Policy
Imitation Learning From Suboptimal Data in Robotics

Agenda
- Problem Statement
- Ambient Diffusion Policy
- Why does this work?
- Results
- Limitations + Future Directions
Key takeaways!
Results are good...
Part 1
Problem Statement
"Suboptimal" Data Is Abundant
- Sim2real gaps
- Noisy or non-expert teleop
- Task-level mismatch
- Changes in low-level controller
- Embodiment gap
- Camera models, poses, etc
- Different environment, objects, etc

Open-X
In-Distribution Data
simulation

Suboptimal / OOD Data
Utility of Suboptimal Data
But there is still value and utility in OOD data!
... we just aren't using it correctlty
Open-X
In-Distribution Data
simulation
Suboptimal / OOD Data

Problem Statement
Open-X
In-Distribution Data
simulation
Suboptimal / OOD Data

Colab w/ Giannis Daras
What are principled algorithms for learning from suboptimal data sources?
\(p\)
\(q\)
"Suboptimal" Data Is Abundant
Q. What does "suboptimal" actions mean?
A. You decide 😊
- Low-quality
- High-quality, but out-of-distribution
- Hand tracking data, UMI, etc
Open-X
In-Distribution Data
simulation
Suboptimal / OOD Data
Part 2
Ambient Diffusion Policy
Diffusion Training
\(t=0\)
\(t=T\)
"High-quality" Data
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
Co-training
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
"Suboptimal" Data
"High-quality" Data
\(t=0\)
\(t=T\)
Co-training
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
"Suboptimal" Data
"High-quality" Data
\(t=0\)
\(t=T\)
\(\alpha\)
\(1-\alpha\)
\(p^{train} = \alpha\) \(p\)\(+(1-\alpha)\) \(q\)
\(p^{train}\) contains \(q\) \(\implies\) This is the wrong objective
\(\pi(A|O)\) learns both the good and the bad features of \(q\)
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(p_t\) \(\not\approx\) \(q_t\)
\(p_t\) \(\approx\) \(q_t\)
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t=0\)
Gaussian Noise As Contraction
\(p_0\)
\(q_0\)
\(p_t\)
\(q_t\)
D(p_0, q_0) \geq D(p_t, q_t)
\(D(p_t, q_t) \to 0\) as \(t\to \infty\)
\(\implies \exists t_{min} \ \mathrm{s.t.}\ D(p_t, q_t) < \epsilon\ \forall t \in (t_{min}, T]\)
Noisy Channel
\(Y = X + \sigma_t Z\)
\(D(p_0, q_0)\)
\(D(p_t, q_t)\)
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(p_t\) \(\not\approx\) \(q_t\)
\(p_t\) \(\approx\) \(q_t\)
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t=0\)
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
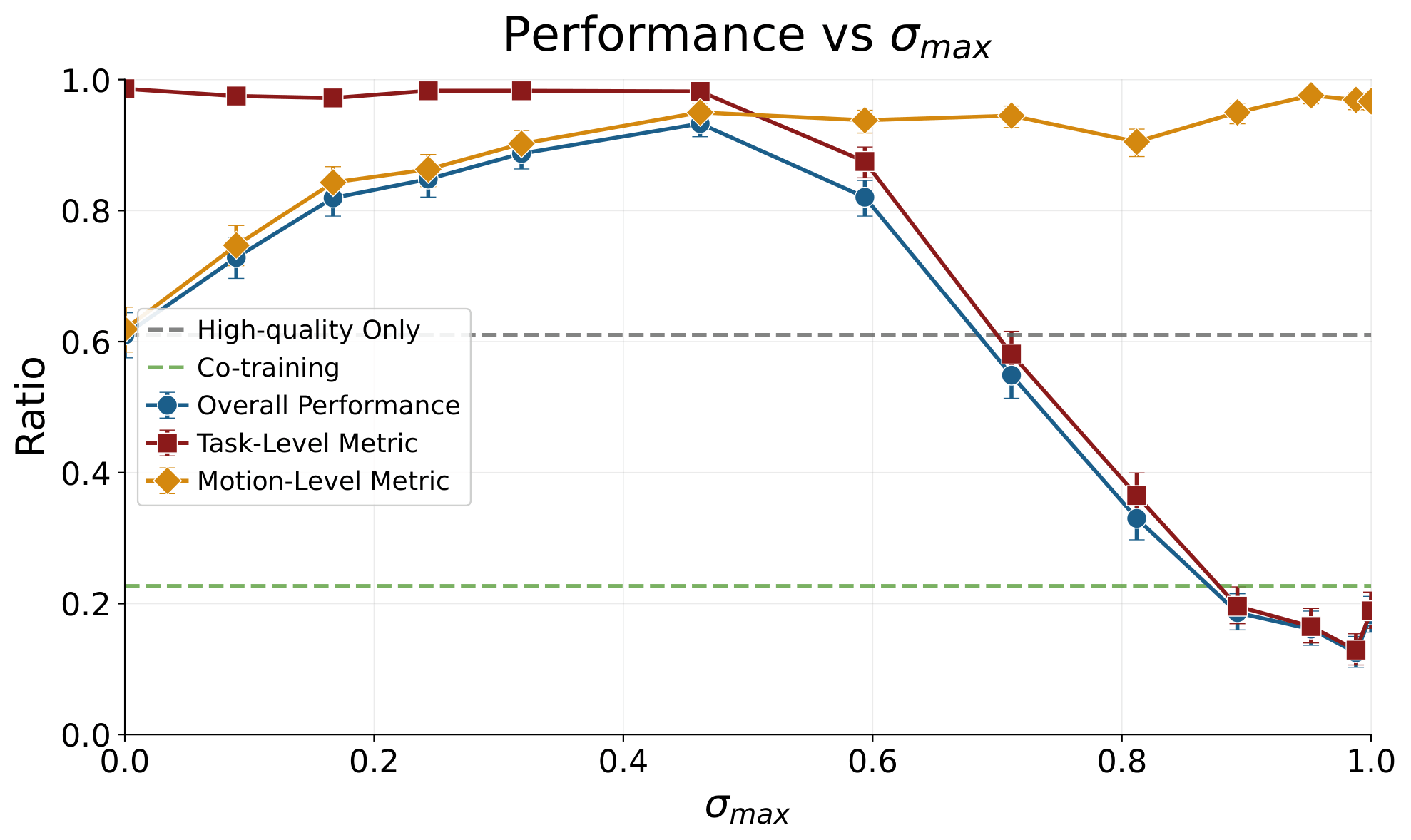
Choosing \(\sigma_{min}\)
How to choose \(t_{min}\)?
\(\sigma_{t_{min}}\)
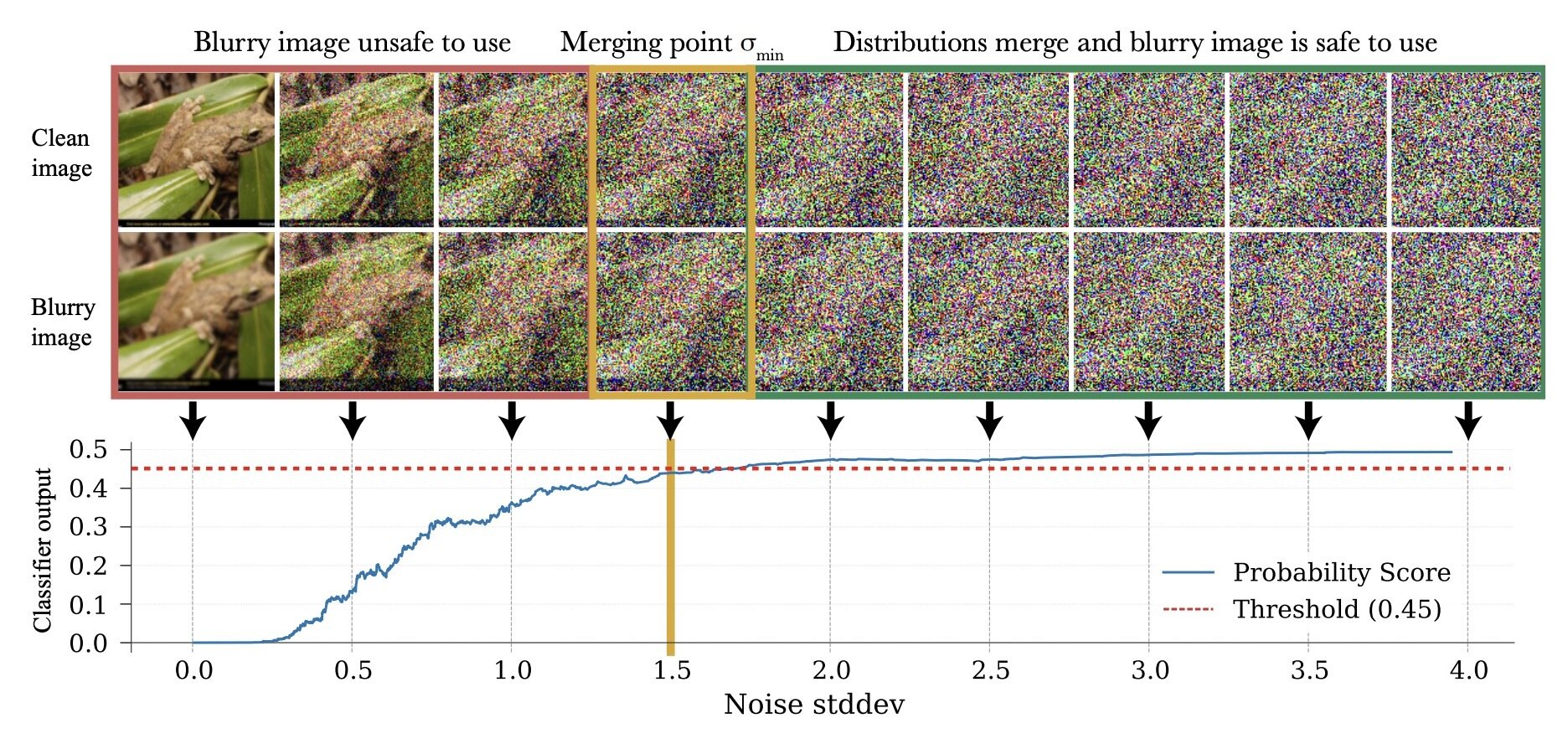
At high noise, high quality and low-quality actions are indistinguishable
Suff: if a classifier cannot reliable discern \(p_t\) and \(q_t\), then the data is safe to use
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
How to choose \(t_{min}\)?
Increasing granularity
Assign \(t_{min}\) per datapoint
Assign \(t_{min}\) per dataset
Run the classifier per dataset
Run the classifier per datapoint
We will see examples across this spectrum...
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(p_t\) \(\approx\) \(q_t\)
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t<t_{\max}\)
"Locality"
Both intervals \([0, t_{max})\) and \((t_{min}, T]\) have interpretations. More on this later...
\(t=0\)
\(t_{\max}\)
Implementation: Very simple!!
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t<t_{\max}\)
- Sample diffusion time, \(t\)
- Sample admissible datapoint from \(\mathcal{D}_p \cup \mathcal{D}_q\)
\(t_{\max}\)
\(t=0\)
Implementation: Very simple!!
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
\(t<t_{\max}\)
- Sample diffusion time, \(t\)
- Sample admissible datapoint from \(\mathcal{D}_p \cup \mathcal{D}_q\)
\(t_{\max}\)
\(t=0\)
Question break!
Part 3
Why Does This Work?
Answer
The structure of robot data
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t<t_{\max}\)
\(t_{\max}\)
\(p_t\) \(\approx\) \(q_t\)
"Locality"
Both intervals \([0, t_{max})\) and \((t_{min}, T]\) have interpretations.
\(t=0\)
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t_{\max}\)
\(p_t\) \(\approx\) \(q_t\)
Utility of \(q\) is highest when \(t_{min}\) is small.
\(t=0\)
Let's start with \((t_{min}, T]\).
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
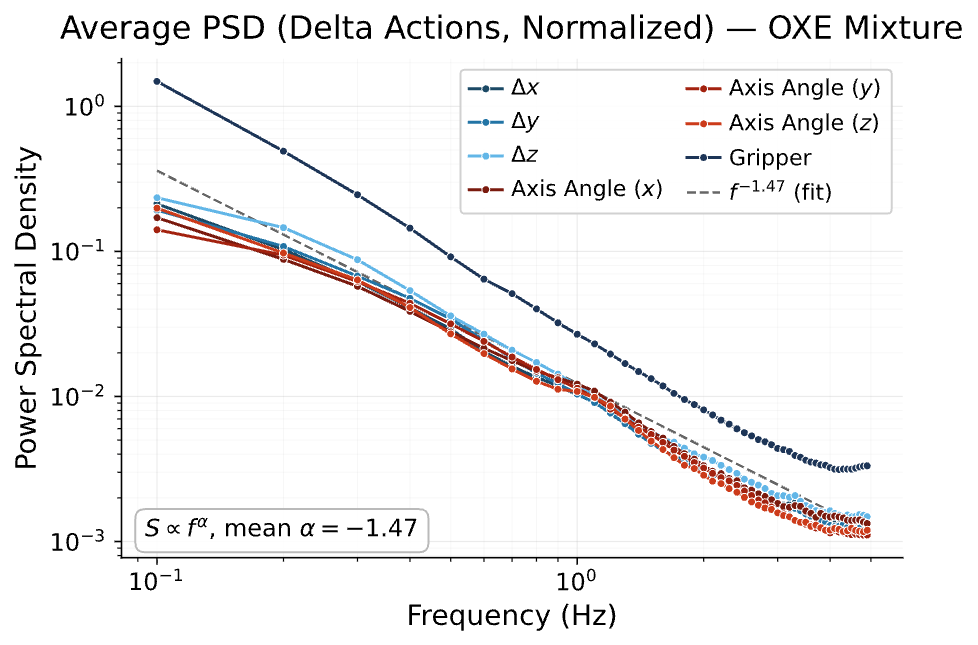
Power Spectral Density (PSD)
By Sander Dieleman
Image data has spectral power law
\(\implies\)
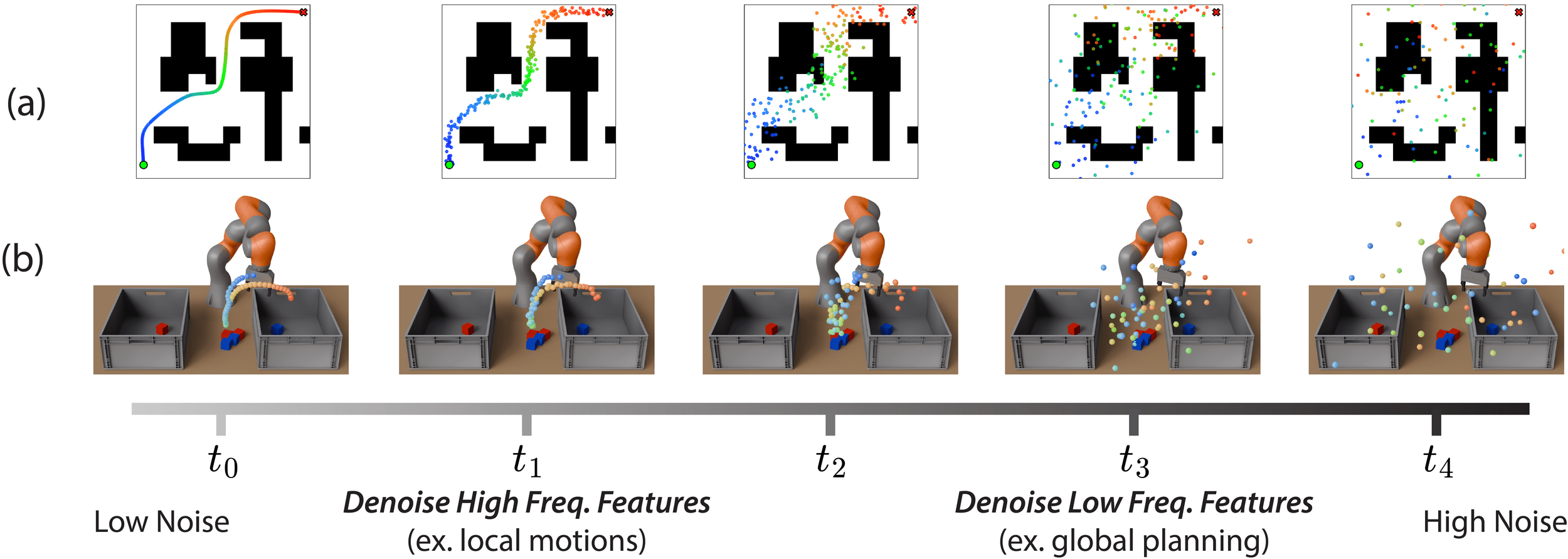
- Image diffusion is coarse-to-fine
- Noise masks high-freq first
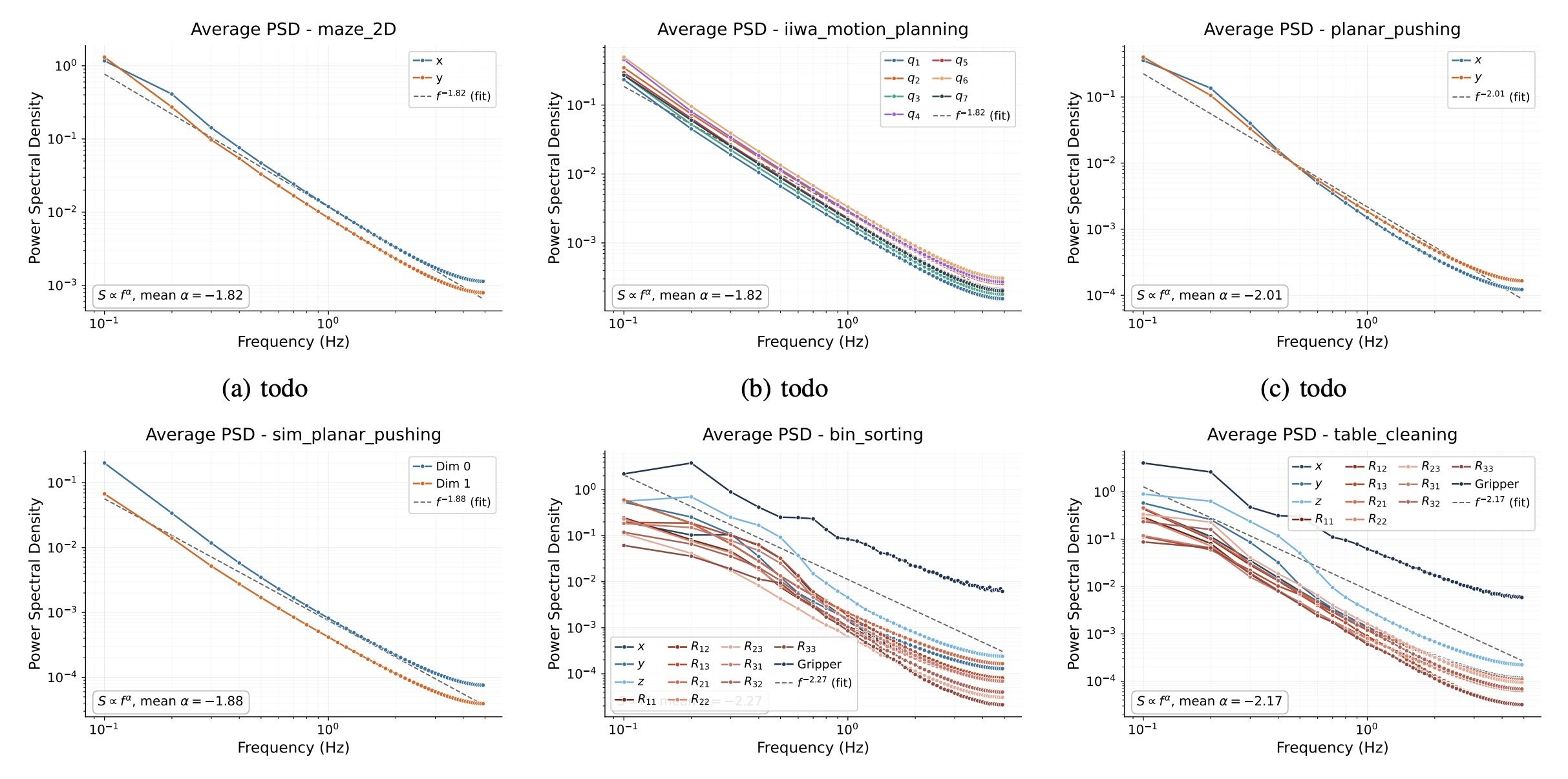
Robot action data exhibits a spectral power law
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Robot Data: PSD
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Robot Data: PSD
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Implications for Robotics
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Implications for Robotics
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Implications for Diffusion Policy
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
1. Implications for Diffusion Policy
Diffusion Policy's learn different features at different noise levels
We should only use suboptimal data when it aligns with high-quality data
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
2. Implications for Ambient Diffusion Policy
Noise masks motion primitives first
\(\implies t_{min}\) is small when the suboptimality is motion-level
Noise masks motion primitives first
\(\implies t_{min}\) is small when the suboptimality is motion-level
i.e. \(q\) contains the correct global plan, but the incorrect low-level motions
- Noisy or non-expert teleop
- Sim2real gaps
- Changes in low-level controller
- Embodiment gap
- Hand-tracking Data
- Different environment, objects, etc
2. Implications for Ambient Diffusion Policy
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t<t_{\max}\)
\(t_{\max}\)
\(p_t\) \(\approx\) \(q_t\)
"Locality"
Both intervals \([0, t_{max})\) and \((t_{min}, T]\) have interpretations.
\(t=0\)
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Task-level Corruptions
What if the action corruption is task-level?
Red \(\rightarrow\) Left
Blue \(\rightarrow\) Right
Red \(\rightarrow\) Right
Blue \(\rightarrow\) Left
(out-dated video...)
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
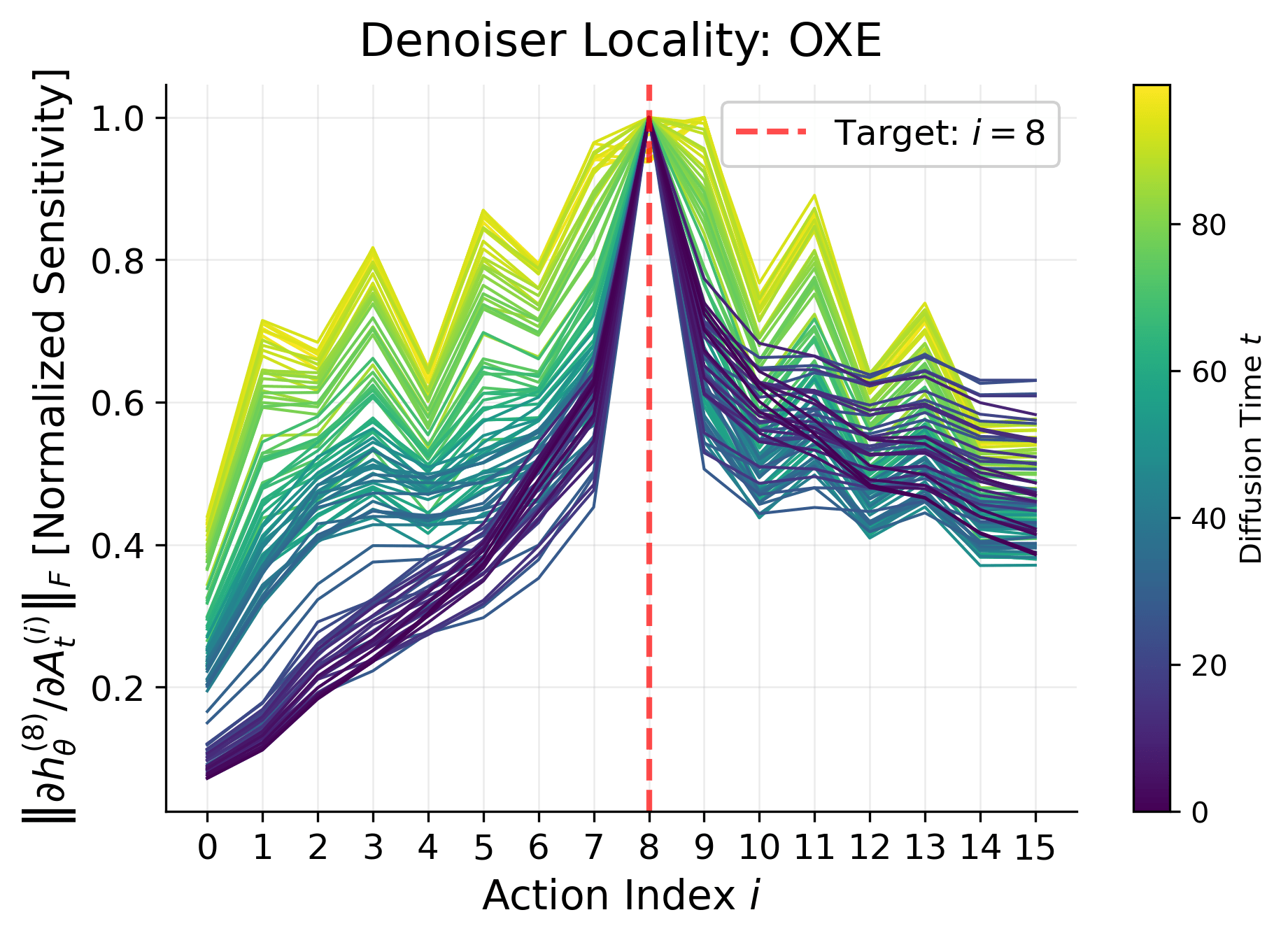
Locality
Locality (of the optimal denoiser at low noise)
The output at each coordinate depends primarily on a small receptive field in the noisy input
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Locality
Sensitivity of \(\hat a_0^{(8)}\) to \(a_\sigma^{i}\) at different noise levels
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Locality
Locality (of the optimal denoiser at low noise)
The output at each coordinate depends primarily on a small receptive field in the noisy input
For robotics, denoisers at low noise
- Learn motion primitives
- Ignore global task structure
\(\implies\) can learn to grasp from data for the wrong task!
Part 4a
Controlled Experiments
Question break!
Ambient Diffusion Policy
\(t_{\min}\)
\(t> t_{\min}\)
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t_{\max}\)
\(p_t\) \(\approx\) \(q_t\)
\(t=0\)
Following 3 experiments only use \(t_{min}\)
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
Motion Planning Experiments
Distribution shift: Low-quality, noisy trajectories
High Quality:
100 GCS trajectories
Low Quality:
5000 RRT trajectories
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
Task vs Motion Level
Distribution shift: Low-quality, noisy trajectories
\(\sigma=0\)
5000 RRT Trajectories
\(\sigma_{min}\)
\(\sigma=1\)
100 GCS Trajectories
Task level:
learn the maze structure
Motion level:
learn smooth motions
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
Results
GCS
Success Rate
Avg. Acc^2
(Motion-level)
RRT
GCS+RRT
(Co-train)
GCS+RRT
(Ambient)
57.5%
Swept for best \(t_{min}\) per dataset
Policies evaluated over 1000 trials each
99.0%
141.65
74.8
99.4%
62.2
99.5%
30.9
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
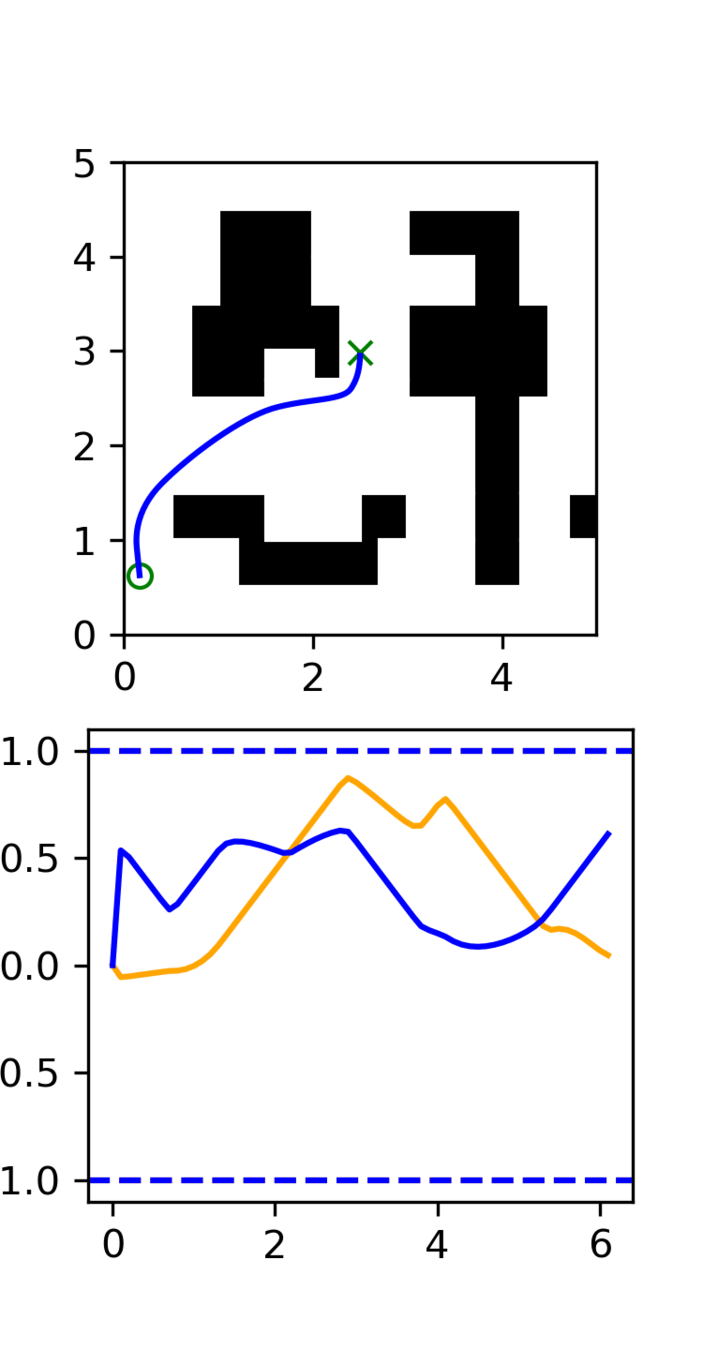
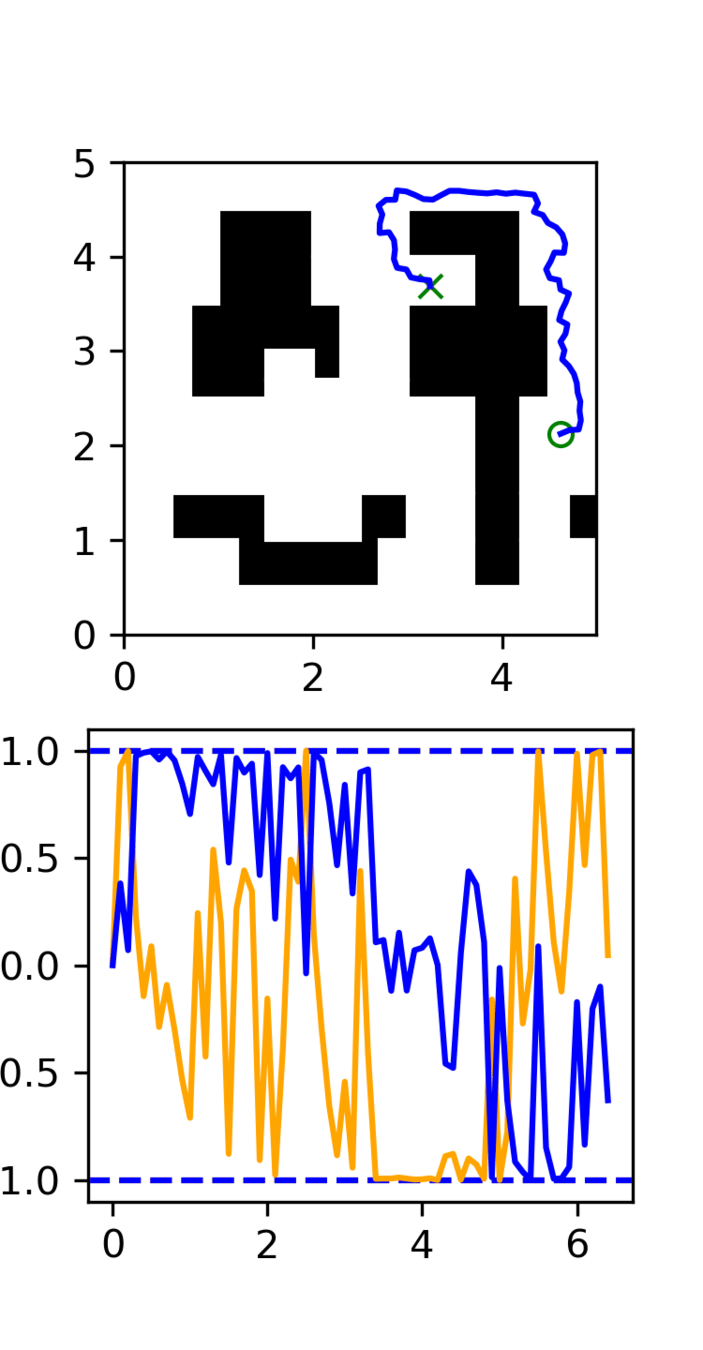
Qualitative Results
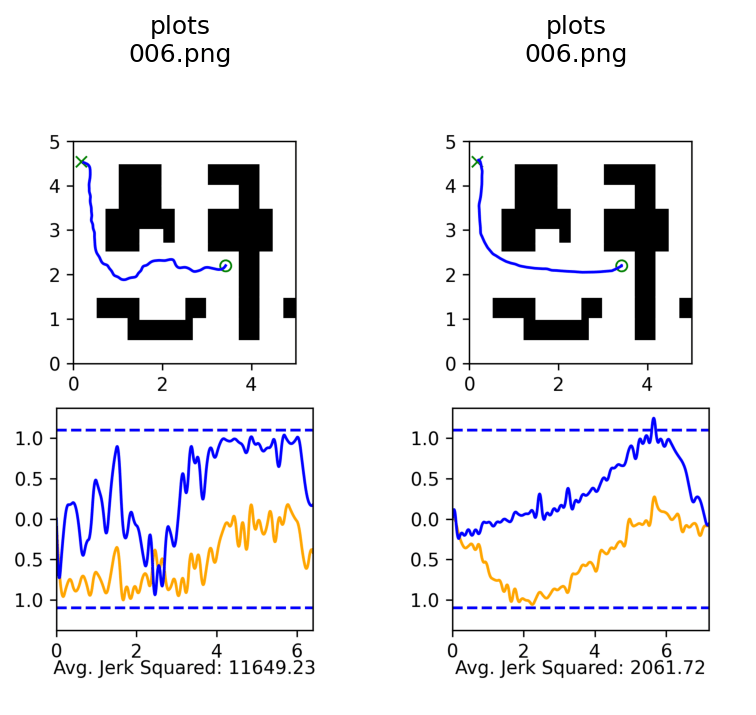
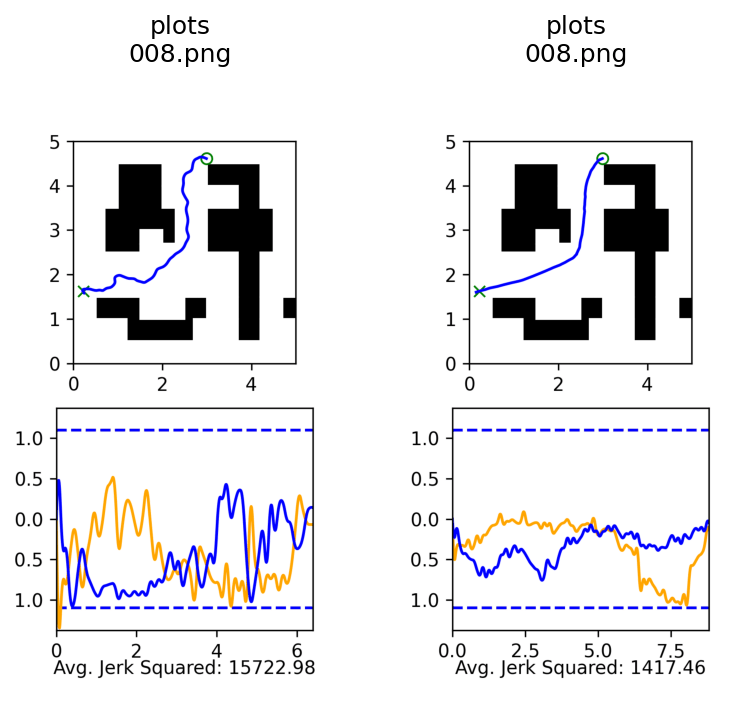
Co-trained
Ambient
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
7-DoF Motion Planning
Clean data:
- 100k trajopt trajectories
Corrupt data:
- 1M RRT trajectories
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
7-DoF Motion Planning
Trajopt
Success Rate
Avg. Acc^2
(Motion-level)
RRT
Trajopt+RRT
(Co-train)
Trajopt+RRT
(Ambient)
46.0%
52.0%
3.9
54.9
59.9%
42.7
65.9%
31.4
Swept for best \(\sigma_{min}\) per dataset
Policies evaluated over 1000 trials each
Sim & Real Cotraining
Distribution shift: sim2real gap
In-Distribution:
50 demos in "target" environment
Out-of-Distribution:
2000 demos in sim environment
Loss Function
Loss Function (for \(x_0\sim q_0\))
Denoising Loss vs Ambient Loss
Choosing \(\sigma_{min}\)
Results
"Real" Only
Success Rate
Co-train
Ambient
(single \(t_{min}\))
56.5%
Policies evaluated over 200 trials each
84.5%
87.0%
Ambient
(\(t_{min}\) per datapoint)
93.5%
Goal: isolate the effect of locality in robotics
Locality Only
"High-quality" Data
\(t=T\)
For all \(t \in [0,T]\): train \(h_\theta(A_t, O, t) \approx \mathbb{E}[A_0 \mid A_t, O]\)
\(t<t_{\max}\)
\(t_{\max}\)
"Locality"
\(t=0\)
Example: Bin Sorting
Distribution shift: task level mismatch, motion level correctness
In-Distribution:
50 demos with correct sorting logic
Out-of-Distribution:
200 demos with incorrect sorting
2x
2x
Metrics
Robot needs to learn two things:
1. Motion Planning
2. Logic
\(\frac{\#\ blocks \ in \ any \ bin}{total \ blocks}\)
\(\frac{\# \ blocks \ in \ correct \ bin}{\# \ blocks \ \ in \ any bin}\)
Goal: learn motion planning from the bad data, but not the task planning
Success rate:
\(\frac{\# \ blocks \ in \ correct \ bin}{\# \ total \ blocks}\) = (motion planning) x (logic)
Results
Diffusion
Success Rate
Logic Metric
Cotrain
Motion Metric
Locality
61.0%
61.9%
98.6%
22.7%
87.2%
26.0%
93.3%
95.0%
98.2%
Task Planning
Motion Planning
Task Conditioning
Success Rate
Logic Metric
Cotrain
(with task condition)
Motion Metric
Locality
90.3%
91.5%
98.6%
93.3%
95.0%
98.2%
Locality
(with task condition)
92.8%
94.2%
98.5%
Part 4b
Scaling Experiments
Scaling to Real-World Datasets
Open-X
Diffusion Policy
In-Distribution Data
Policy
\(\pi(a | o, l)\)
\(p\)
\(q\)
"Suboptimal" / OOD Data
- cross-embodied
- diff. teleoperators
- sim data
- mislabeled data
- diff tasks, environments, camera
"Suboptimal" Data
Open-X
Magic Soup++: 27 Datasets
Custom OXE: 48 Datasets
- 1.4M episodes
- 55M "datagrams"
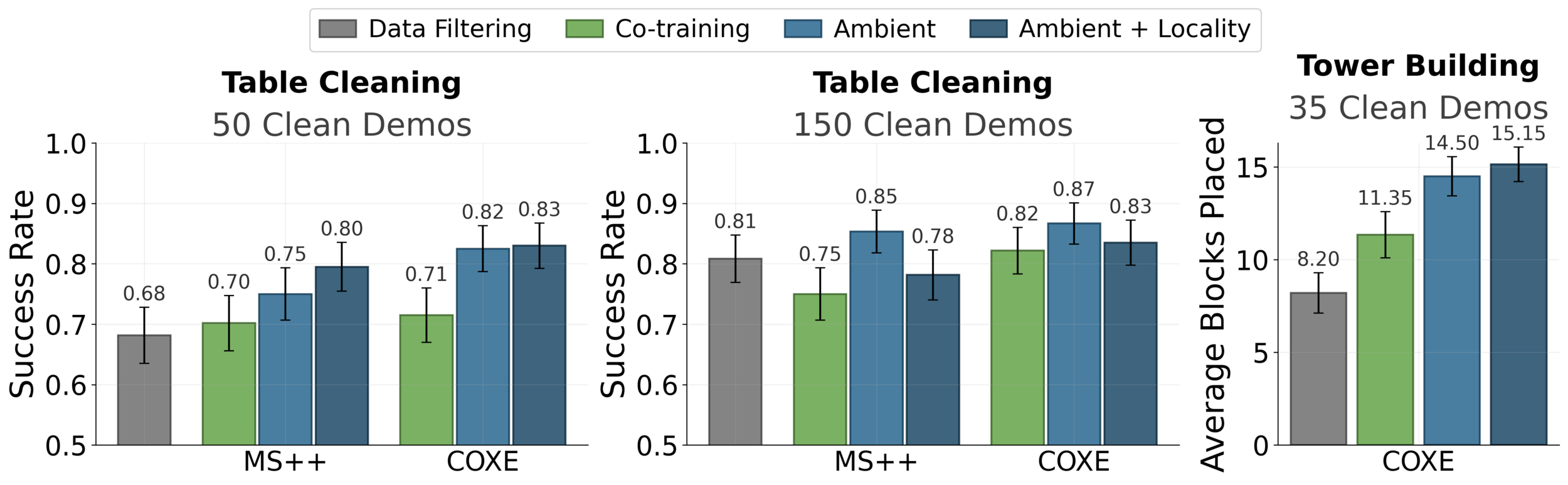
Table Cleaning
Tower Building
*both videos are autonomous rollouts from Ambient Diffusion Policies at 2x speed
Table Cleaning & Tower Building
Scaling to Real-World Datasets
84%
33%
More "suboptimal" data
Ablations
- Finetuning comparison
- Re-weighting + Ambient
- "Suboptimal" Observations
- Parameter sweeps
- Evidence of global-to-local hierarchy
Part 5
Limitations and Future Work
Future Directions
Q: What is "in-distribution" or "high-quality"?
A [in this paper]: expert teleoperator on your robot, your task, your environment
A [more generally]: data quality?
Q: Better methods to choose \(t_{min}\) and \(t_{max}?\)
Q: Soft Ambient / Rejection-based sampling
Thank You!
Ambient can be used to learn from any suboptimal / OOD data in robotics
In-Distribution Data
Open-X
simulation
Suboptimal / OOD Data
Project Website
Ambient Diffusion Policy: Imitation Learning From Suboptimal Data in Robotics
By weiadam


