cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
Introduction
1
Three step plan:
Introduction
2
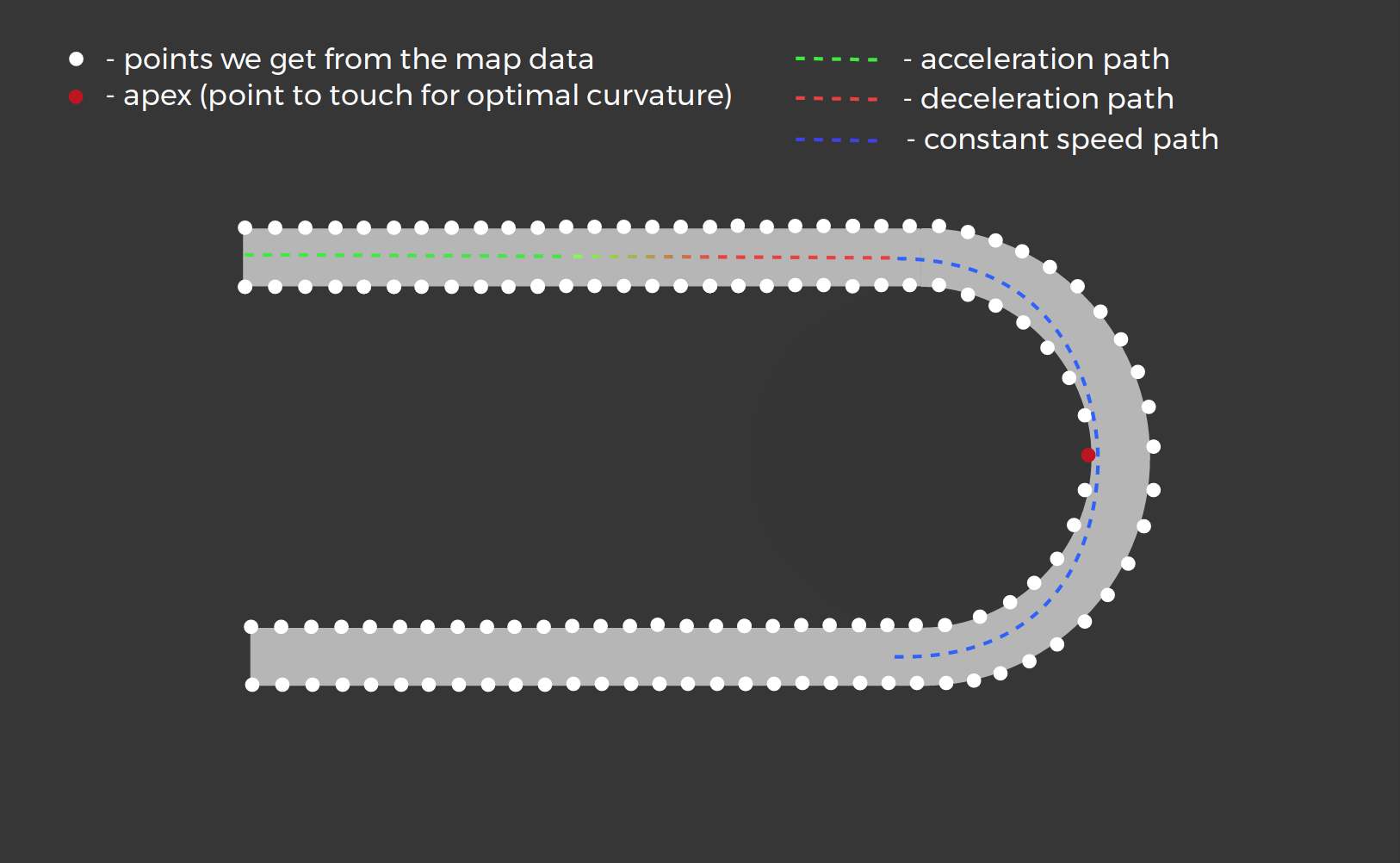
Legend
3
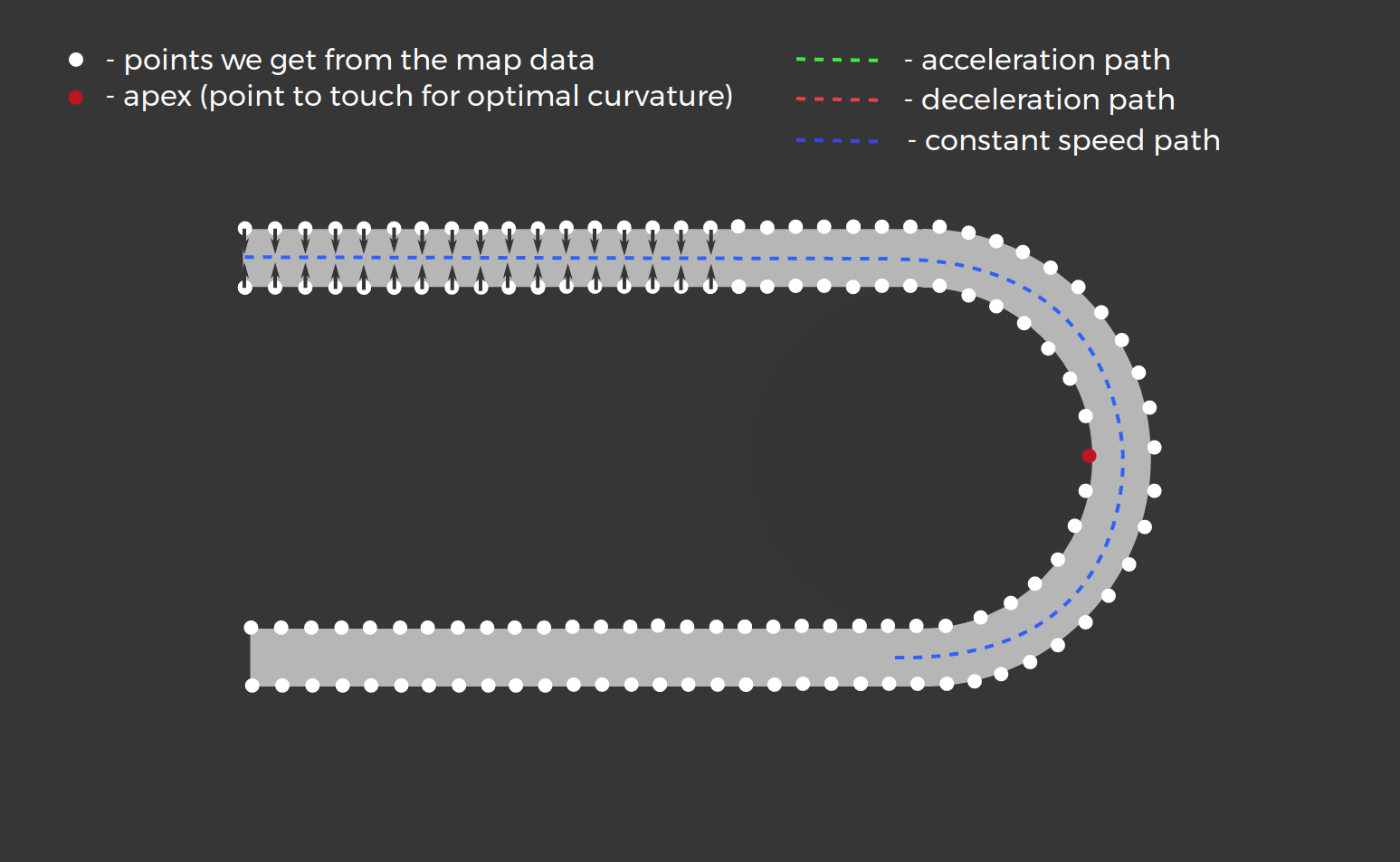
Base Case - Middle Path
4
Cross Entropy & Maximizing Radii
5
Approach 1:
[1] Brachistochrone Problem - https://en.wikipedia.org/wiki/Brachistochrone_curve
[2] Tires & Downforce - https://www.youtube.com/watch?v=fjrOsp6S8rA
Cross Entropy & Maximizing Radii
6
Advantages:
Disadvantages:
Deterministic Line Calculation & Cross Entropy Method
7
Approach 2:
[3] http://vamos.sourceforge.net/computer-controlled-cars/node2.html
Deterministic Line Calculation & Environment Mapping
8
Advantages:
Disadvantages:
By cirquit



