第五章 机械能
锥体“上滚”
第五章A 功
功(Work)的要素
1
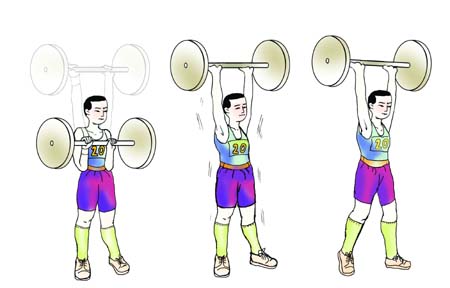
力、物体在力方向上的位移
F
上举过程
挺住不动
匀速向前移动
F
F
s
s
功的计算
2
W=Fs \cos \theta
W=Fs \cos \theta
功的计算
2
力对物体所做的功W等于力的大小F、位移的大小s、力和位移之间夹角θ的余弦三者的乘积。

F
s
θ
功的计算
2
1、首先确定研究对象。
2、对物体进行受力分析,作出物体的受力图。
3、找准每个力与位移方向之间的夹角θ。
4、根据功的公式:W=Fscosθ求解。
计算力对物体做功的步骤
功的计算
2
1 用此公式计算功时,α为力和位移方向上的夹角,F必须为恒力。
2 做功与物体运动形式无关,也就是说,力对物体做功具有独立性。
3 计算功时,一定要明确是计算哪个力对物体所做的功,不能张冠李戴。
力对物体做功的理解
当\( \theta= \frac{\pi}{2} \)时,\( \cos \theta=0 \),\( W=0\),这时力的方向与位移的方向垂直,力不做功。
当\(\frac{\pi}{2}<\theta≤ \pi \)时,\( \cos \theta<0 \),\( W<0\),这时力做的功为负值,或者说物体克服力做功。
当\( 0≤\theta<\frac{\pi}{2} \)时,\( \cos \theta>0 \),\( W>0\),这时力做的功为正值。
正功和负功
3
注意:虽然功有正负,但功是标量,符号并不表示方向。

如图所示,一位老爷爷在一片平坦的草地遛狗,拉狗的绳子与地面夹角为30°,设绳的拉力始终是20 N,在向前运动2 m的过程中拉力做了多少功 ?
正功和负功
3
如图所示,用一根长 l=0.8 m的细绳拴住一个质量为0.5 kg的小球悬挂在O点,将小球拉至A点使细绳呈水平状态。求从释放小球到细绳和小球摆至竖直位置OC的过程中,重力和细绳的拉力对小球做的功。(g取10 m/s 2)
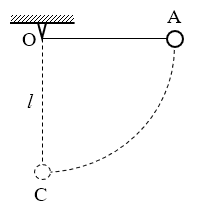
正功和负功
3
Title Text
合力做功的求法
先把合力F求出来,然后用公式W=Fscosθ计算合力所做的功。
先把每个分力所做的功算出来,然后求它们的代数和,即合力所做的功等于每个分力所做功的代数和。
正功和负功
3
在F-s图中,表示F与s关系的曲线和坐标轴所包围的面积表示功的大小。
功的图示
4
s
F
W
第五章B 功率
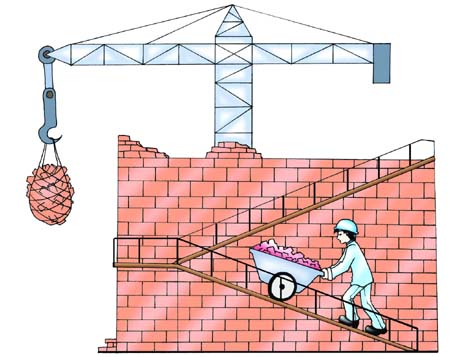
做功的快慢
1、做功是否相同?
2、做功快慢是否相同?
在建筑工地,将砖块送到楼顶
功率的定义
1
P= \frac {W}{t}
功 W 跟完成这些功所用时间 t 的比值,叫做功率。
单位是W(读作瓦),1 W = 1 J/s
功率的计算
2
P= \frac {W}{t}
定义式:
P= Fv
推论:
推导过程:\(P=\frac{W}{t} =\frac{Fs}{t}=Fv\)
平均功率和瞬时功率
3
\overline{P}= \frac {W}{t}
平均功率
P= Fv
瞬时功率
\overline{P}= F\overline{v}
额定功率和实际功率
4
额定功率:机械正常条件下长时间工作的最大功率
实际功率:机械实际运行时的功率
第五章C 动能
E_{k}=\frac{1}{2}mv^2
第五章D 重力势能
3、重力做功的特点
重力做功与路径无关,仅取决于始点与终点的位置
第五章E 功和能量变化的关系
第五章F 机械能守恒定律
八年级第二学期物理课本
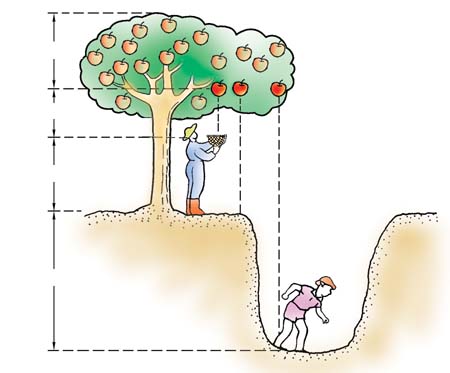
1、动能和势能的相互转化
自由落体运动
抛体运动
动能和重力势能之间的相互转化
过山车
1、动能和势能的相互转化
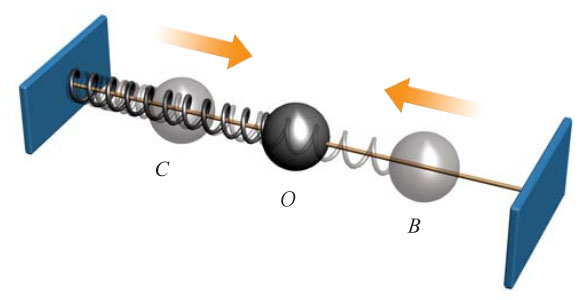

动能和弹性势能之间的相互转化
动能、重力势能和弹性势能
之间的相互转化
弹簧振子
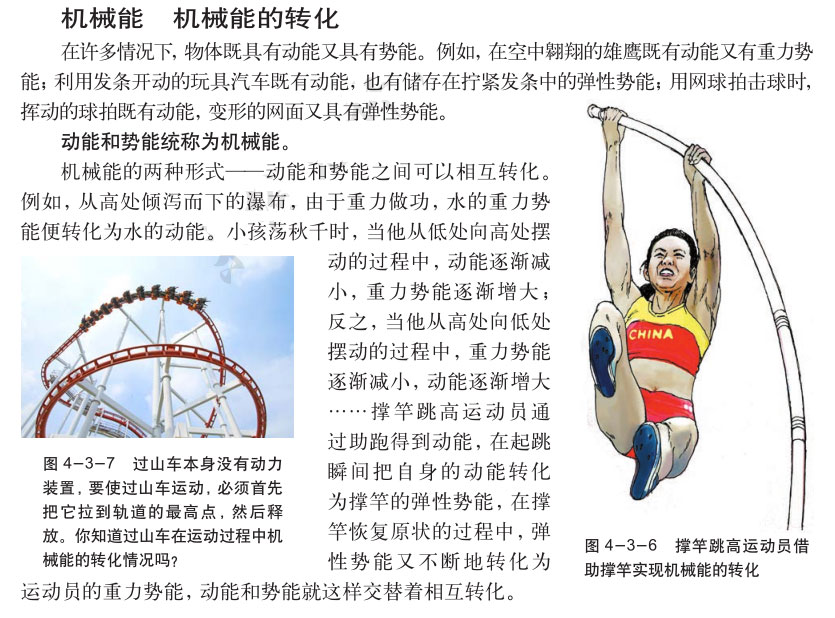
撑杆跳
2、机械能
动能、势能统称为机械能
E=E_k+E_p
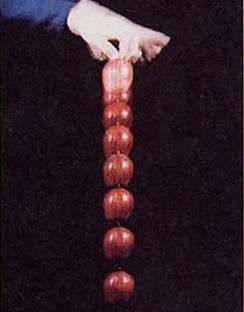
提桶碰鼻

3、机械能守恒定律
守恒条件
只有重力做功
表达式
mgh_1+\frac{1}{2}mv_1^2=mgh_2+\frac{1}{2}mv_2^2
3、机械能守恒定律
如何理解只有重力做功?
物体只受重力
除重力外还受其他力,但其他力不做功
自由落体运动
抛体运动

接触面光滑
不计空气阻力
3、机械能守恒定律
判断下面各个实例中,哪些是机械能守恒?为什么?说明理由。
(1)跳伞运动员带着张开的降落伞在空气中匀速下降。
(2)不计空气阻力,把手榴弹或标枪斜向上抛出。
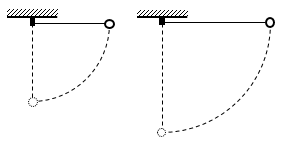
(3)用细绳拴着一个小球,绳的一端固定,使小球在光滑水平面上做匀速圆周运动。
(4)用细绳拴着一个小球,绳的一端固定,设法使小球在竖直平面上做匀速圆周运动。
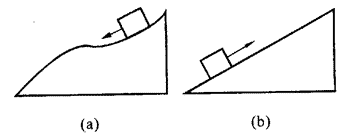
(5)物体沿着光滑的曲面滑下,如图(a)所示。
(6)拉着一个物体沿着光滑的斜面匀速上升,如图(b)所示。
3、机械能守恒定律
一小球做自由落体运动,求下落45m高度时速度为多大?( g 取 10 \(m/s^2\))
3、机械能守恒定律
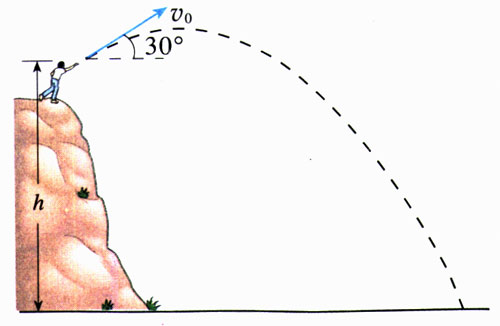
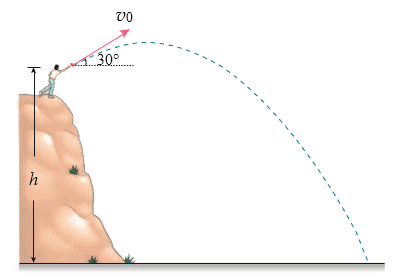
质量为 0.5 kg 的石块从 10 m 高处以 30° 角斜向上方抛出,速度 \(v_0\) 的大小为 5 m/s。求:(不计空气阻力, g 取 10 \(m/s^2\))
(2)求落地时的速度大小。
结论: \({W_F}= \Delta {E_k}\) 如何运用?(做正功的情况)
机械能守恒定律: \({mgh_1}+\frac{1}{2}mv_1^2= {mgh_2}+\frac{1}{2}mv_2^2\)
4、机械能和其他形式能的转化
情景:跳伞运动员带着张开的降落伞匀速下落
机械能转化为什么能?
(3)

机械能增加还是减少?
(2)
除重力之外还有什么力做功,做正功还是负功?
(1)
4、机械能和其他形式能的转化
情景:拉着一个物体在光滑斜面匀速上升
什么能转化为机械能?
(3)
F
机械能增加还是减少?
(2)
除重力之外还有什么力做功,做正功还是负功?
(1)
功是能量转化的量度
W 合正功, E k增加; W 合负功, E k减少
1
W G正功, E p减少; W G负功, E p增加。 W G=-ΔEp
2
W 除G外正功, E增加; W 除G外负功, E减少
3
DIS实验:验证机械能守恒定律
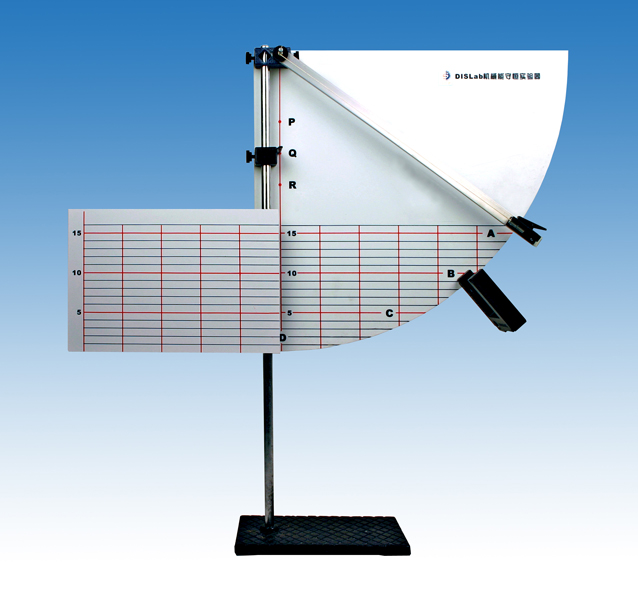
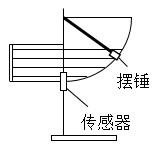
观察由同一高度释放的摆锤上升的最大高度
1
摆锤释放器
定位挡片
DIS实验:验证机械能守恒定律
验证机械能守恒定律
2
摆锤释放器
光电门传感器
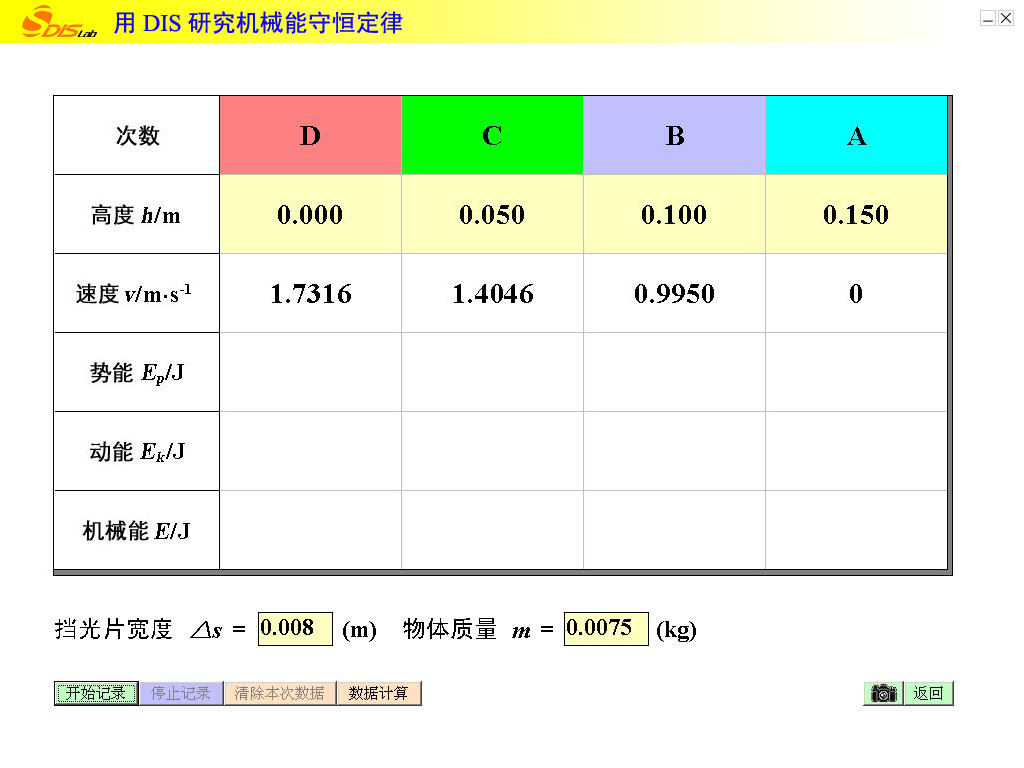
\begin{aligned} mgh_{\rm A}+\frac{1}{2}mv{\rm_A}^2=mgh_{\rm B}+\frac{1}{2}mv{\rm_B}^2 \\
=mgh_{\rm C}+\frac{1}{2}mv{\rm_C}^2=mgh_{\rm D}+\frac{1}{2}mv{\rm_D}^2 \end{aligned}
要验证
h_A=0.15\,{\rm{m}},h_B=0.10\,{\rm{m}},h_C=0.05\,{\rm{m}},h_D=0.00\,{\rm {m}}
已知
v_A=0.0\,{\rm{m/s}}
(每次都从A点静止释放)
只需测
v_B,v_C,v_D
DIS实验:验证机械能守恒定律

(1)实验1中,装上定位挡片,将摆锤从A点静止释放,观察到它到达左侧最高点,此点与A点高度基本相同。由此得到的结论是:摆锤②。(选填“①”或“②”)
①在摆动过程中,机械能处处相等
②在左侧最高点的机械能与A点的机械能基本相等
在如图所示的“用DIS研究机械能守恒定律”的实验中,有实验1和实验2两部分。
1
(2)请按正确的实验2顺序填写下列步骤:__________。
①开启电源,运行DIS应用软件,点击实验条目中的“研究机械能守恒定律”软件界面
②卸下“定位挡片”和“小标尺盘”,安装光电门传感器并接入数据采集器
③摆锤置于A点,点击“开始记录”,同时释放摆锤,摆锤通过D点的速度将自动记录在表格的对应处
④把光电门传感器放在大标尺盘最底端的D点,并以此作为零势能点。A、B、C点相对于D点的高度已事先输入,作为计算机的默认值
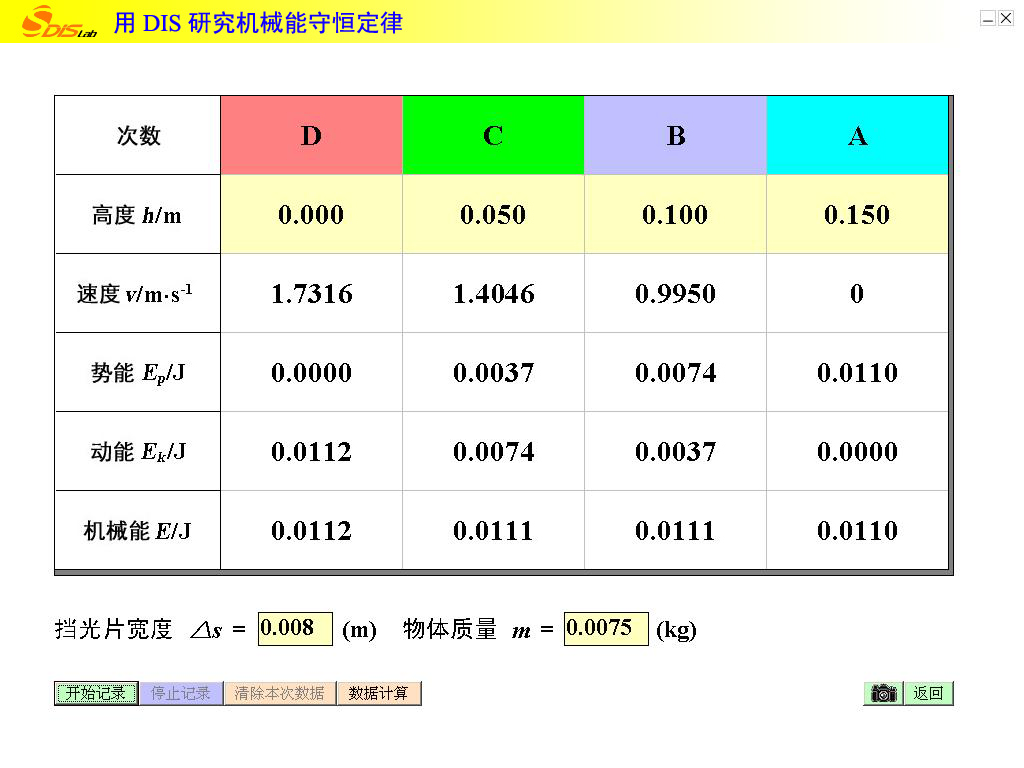
⑤点击“数据计算”,计算D点的势能、动能和机械能
⑥依次将光电门传感器放在标尺盘的C、B点,重复实验,得到相应的数据
1
在如图所示的“用DIS研究机械能守恒定律”的实验中,有实验1和实验2两部分。
②①④③⑤⑥
(3)(多选题)除了以上实验步骤,该实验还需要测量的物理量有( BC )
A.摆线的长度 B.摆锤的直径
C.摆锤的质量 D.摆锤下落的时间
1
在如图所示的“用DIS研究机械能守恒定律”的实验中,有实验1和实验2两部分。
2
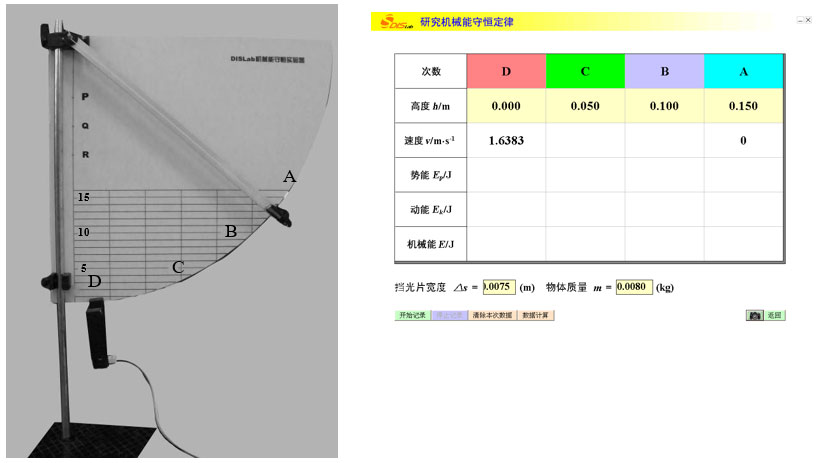
“用DIS研究机械能守恒定律”的实验中,用光电门测定摆锤在某一位置的瞬时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度(实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认),求得摆锤在该位置的重力势能,进而研究势能与动能转化时的规律。
(1)实验时,把___D_____点作为了零势能点。
(2)本实验中,先选取零势能面再进行实验,则零势能面位置的选取对验证摆锤动能与重力势能之和为常数__无____影响(选填“有”或“无”)。
2
“用DIS研究机械能守恒定律”的实验中,用光电门测定摆锤在某一位置的瞬时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度(实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认),求得摆锤在该位置的重力势能,进而研究势能与动能转化时的规律。
(3)(单选)将摆锤由A点静止释放,在摆锤摆到最低点的过程中( B )
(A)摆锤只受重力作用
(B)绳子拉力不做功,重力做正功
(C)绳子拉力做负功,重力做正功
(D)摆锤受到的合外力不为零,合外力做功为零
(4)(单选)若实验测得D点的机械能明显偏大,造成该误差的原因可能是( C )
(A)摆锤在运动中受到空气阻力的影响 (B)光电门没有放在D点
(C)摆锤在A点不是由静止释放的 (D)摆锤释放的位置在AB之间
3
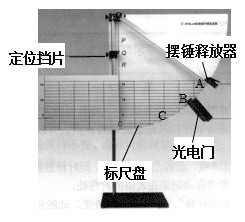
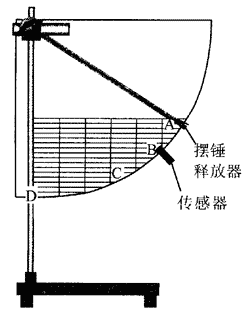
如图为“DIS研究机械能守恒定律”的实验装置。
(1)请指出该同学实验中的错误之处:
①光电门传感器未放在标尺盘最低端的D点;
②摆锤释放器未置于A点。
(2)图中计算机记录的数据与真实值相比将偏小(填“偏大”、“偏小”或“仍准确”)
4
如图所示是在“用DIS实验系统研究机械能守恒定律”的实验装置,完成下列有关问题:
(1)图中摆锤释放器的作用是使摆锤每次从同一位置由静止释放。
(2)每次都准确从同一位置静止释放摆锤,改变传感器安装的高度,以同一零势能面测得四个不同位置的重力势能和动能数据。
|
动能(×10-2J) |
重力势能(×10-2 J) |
机械能(×10-2 J) |
|
0.00 |
7.50 |
7.50 |
|
2.46 |
5.00 |
7.46 |
|
4.91 |
2.50 |
7.41 |
|
7.34 |
0.00 |
7.34 |
分析实验数据可以发现,动能与势能之和(机械能)随测量位置的不同而不断减小,其可能的原因是:摆动过程中存在阻力做负功。
5
如图为“用DIS研究机械能守恒定律”的实验中,将一传感器先后分别固定在竖直板上的D、C和B三点,最低点D作为零势能点。逐次将摆锤从A点自由释放,分别测出摆锤经过D、C和B点时的速度。
(1)实验中使用的传感器是光电门传感器。
(2)已知摆锤的直径为Δs,由传感器测出摆锤通过传感器时的挡光时间为Δt,则摆锤经过传感器时的速度大小为\(\frac {\Delta s}{\Delta t}\)。
(3)若摆锤直径的测量值大于其真实值会造成摆锤动能的测量值偏大。(选填:“大”或“小”)。
5
如图为“用DIS研究机械能守恒定律”的实验中,将一传感器先后分别固定在竖直板上的D、C和B三点,最低点D作为零势能点。逐次将摆锤从A点自由释放,分别测出摆锤经过D、C和B点时的速度。
(4)已知B、C两点与最低点D和高度差分别为hB、hC,实验测得摆锤经过B、C两点时的速度分别为vB、vC,重力加速度为g。为了证明摆锤在B、C两点的机械能相等,需要得到的关系式是\(\frac{1}{2}v_B^2+gh_B=\frac{1}{2}v_C^2+gh_C\)。
(5)某同学由于操作不当,测得摆锤在B点的机械能明显比在A、C和D的机械能大,其原因可能是___________。
光电门传感器固定在B点下方;摆锤释放点高于A点;摆锤离开A点时速度不为零。
P104/15 在20 m高的平台上,弹簧手枪将质量为10 g的子弹以15 m/s的速度水平射出。若不计空气阻力,子弹落地速度大小为25m/s,弹簧手枪对子弹做的功是1.125 J 。
P100/14 某人在距地面10 m高处以10 m/s的速度抛出一个质量为1.5 kg的物体,不计空气阻力,则此人对物体做的功为75J,物体落地时的速度为\( 10 \sqrt{3} \)m/s 。
=10m
=10m/s
\(v_t = 10 \sqrt{3}\)m/s
\(v_0\)=10m/s
\(v_t\)=25m/s
第五章 机械能
By fjphysics



