




Klas Modin PRO
Mathematician at Chalmers University of Technology and the University of Gothenburg
Lagrange-d'Alembert
for virtual displacements \( \delta\mathbf{q}\)
Constraint defined by distribution \(A(\mathbf{q})\dot{\mathbf{q}}=0\)
Lagrange-d'Alembert
for virtual displacements \( \delta\mathbf{q}\)
Constraint defined by distribution \(A(\mathbf{q})\dot{\mathbf{q}}=0\)
Distribution is integrable
\(\Rightarrow\) Lagrangian dynamics on \(T\mathcal C\)
Distribution nonintegrable
Distribution is integrable
\(\Rightarrow\) Lagrangian dynamics on \(T\mathcal C\)
Distribution nonintegrable
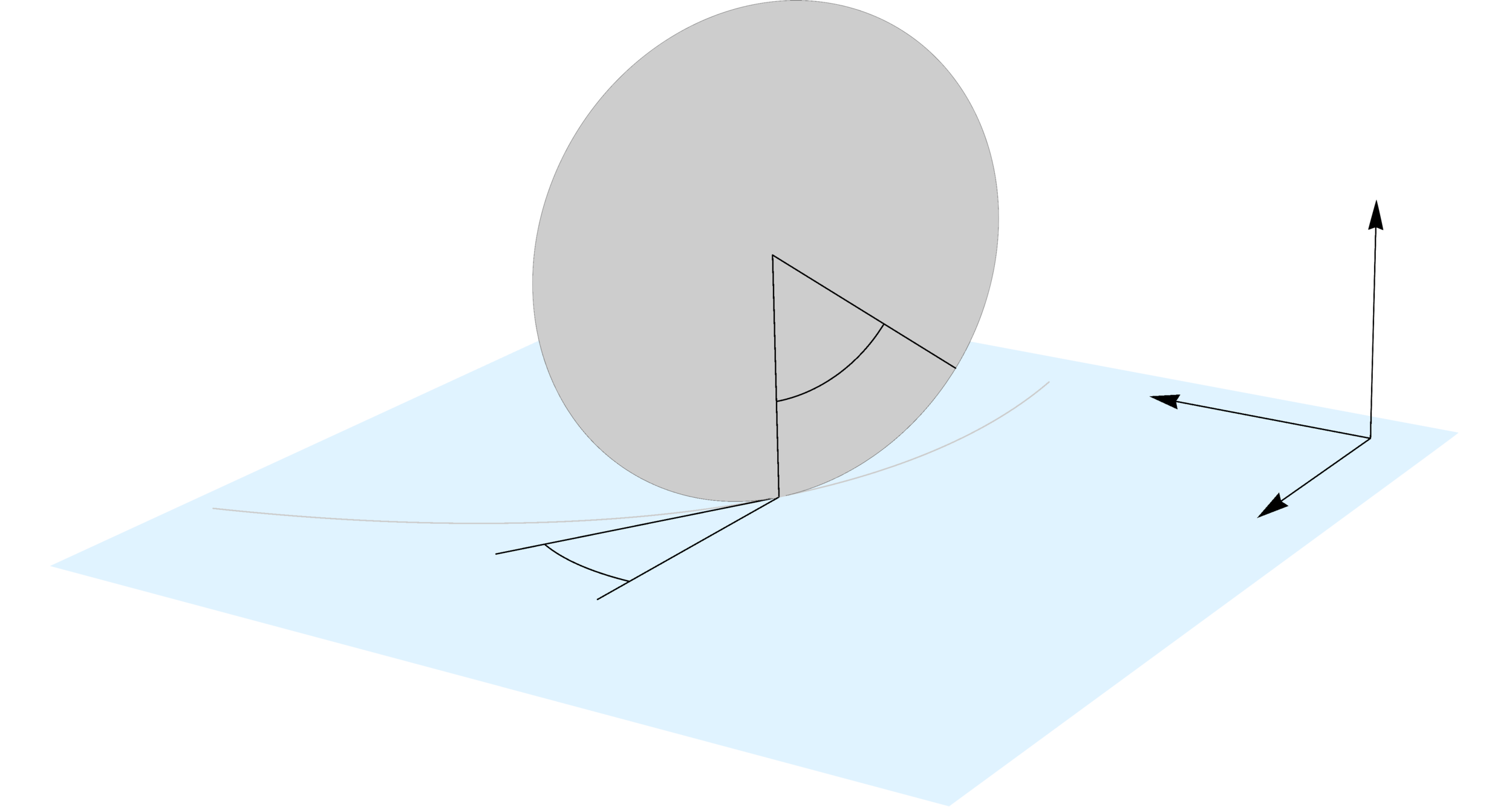
Rolling disk
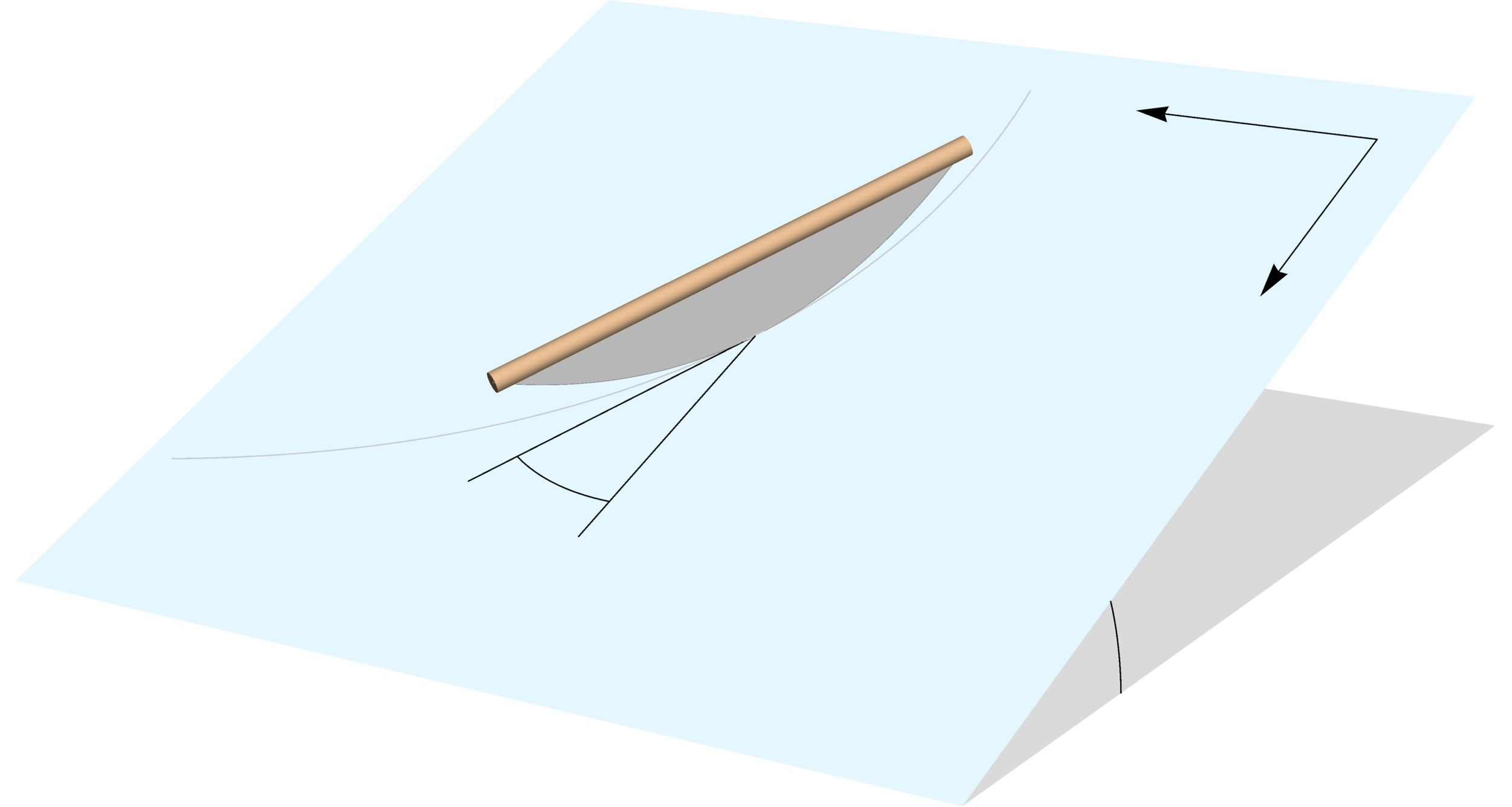
Knife edge
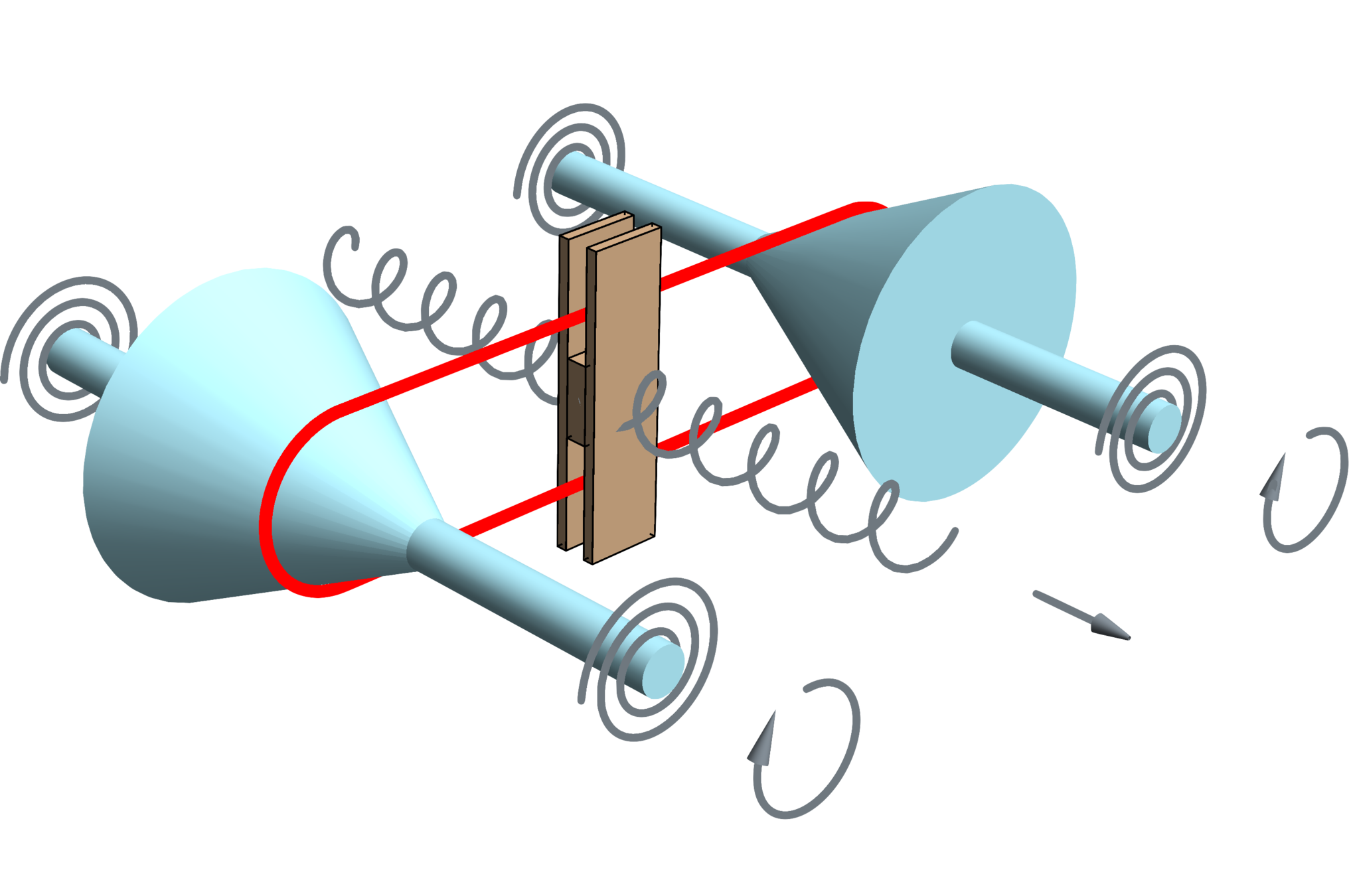
Continuously variable transmission (CVT)
Definition: Numerical integrator
Map \( \Phi_h: (\mathbf{q}_{k},\dot{\mathbf{q}}_{k})\mapsto (\mathbf{q}_{k+1},\dot{\mathbf{q}}_{k+1}) \) that preserves constraints and approximates exact flow \(\varphi^h\)
Exact flow \(\varphi^h\) \(\Rightarrow\) Hamiltonian system on \(T^*\mathcal C\)
Geometric numerical integration and backward error analysis:
Exact flow \(\varphi^h\) \(\Rightarrow\) energy system on \(\mathcal M\)
Idea: discrete analog of Lagrange d'Alembert (DLA)
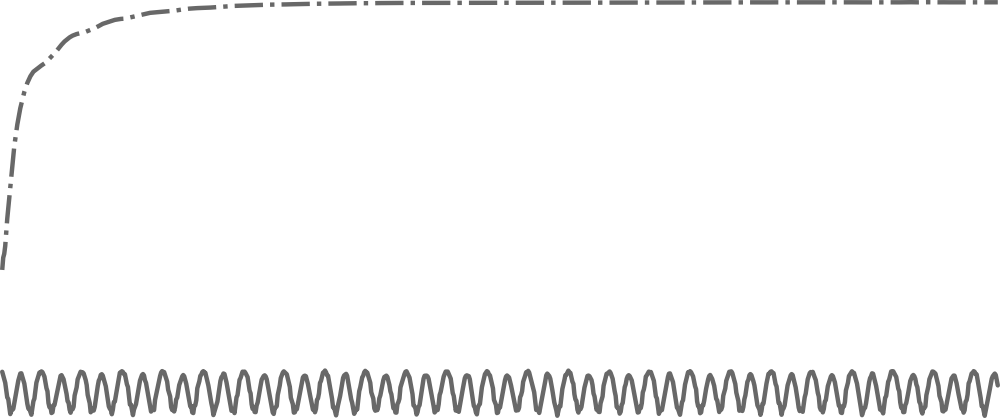
Energy
Time
Strategy
Clues
Strategy
Clues
Energy
Time
DLA but nonreversible
DLA and reversible
Definition: Nonholonomically Coupled System (NCS)
independent subsystem (driver)
Conserved energies: \(E_1(\mathbf x,v)\) and \(E_2(\xi,\dot\xi)\)
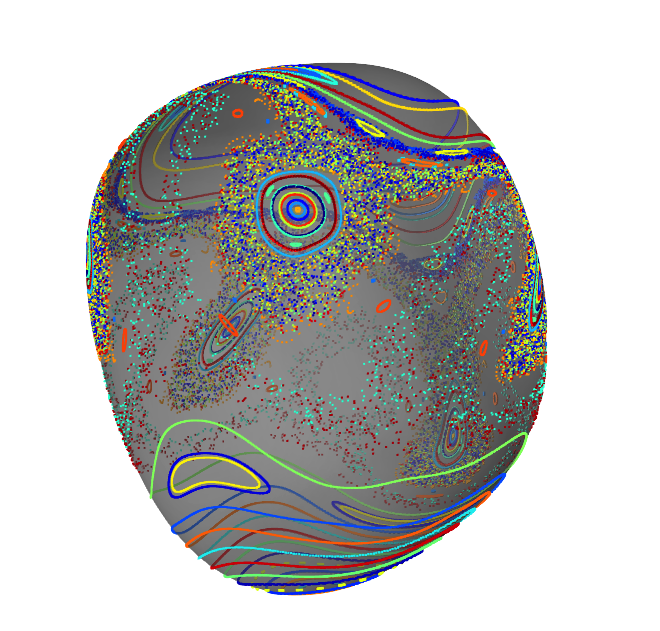
Is system on \(\mathcal M\) integrable?
\(B(\xi)\in \mathfrak{g}\subset \mathfrak{gl}(n)\)
(\(\mathfrak{g}\)-system)
Definition: ODE system integrable \(\iff\) Action-Angle variables
Theorem (M. and Verdier)
NCS (with additional assumptions) are fibrated over integrable system
Reduced dynamics
Requirement for KAM:
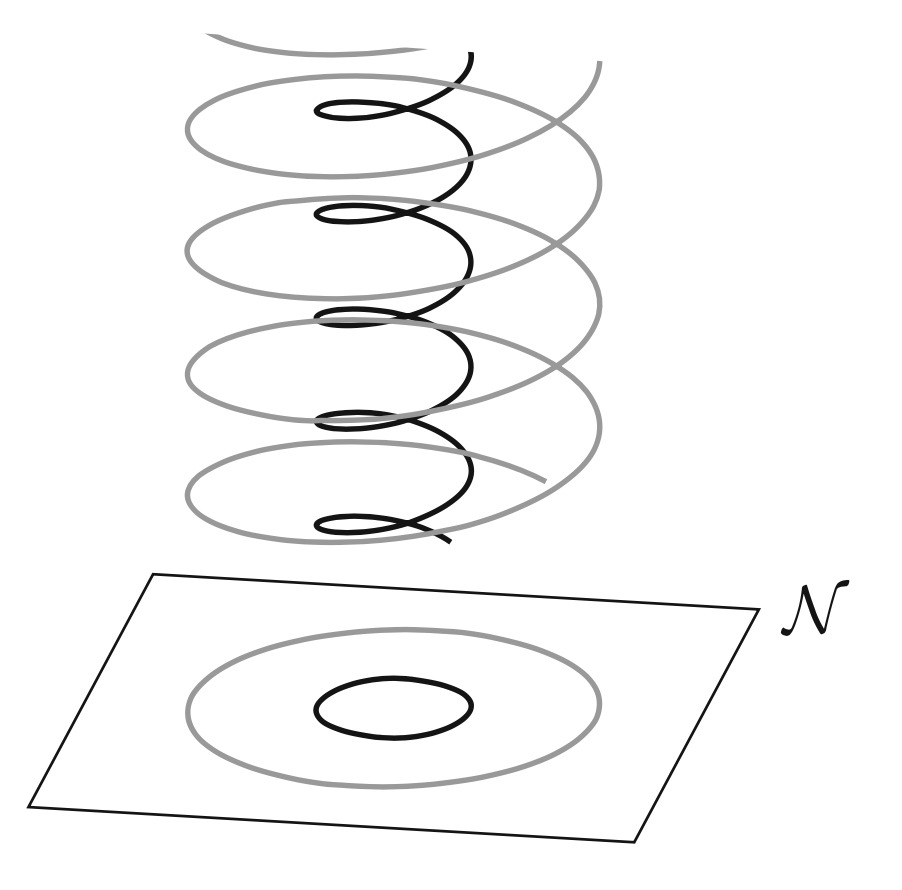
Exact flow:
Action-Angle variables
KAM stable tori
reversible perturbation
Discrete flow:
Requirement for KAM:
Exact flow:
Action-Angle variables
KAM stable tori
reversible perturbation
Discrete flow:
possible failure
Requirement for KAM:
Exact flow:
Action-Angle variables
KAM stable tori
reversible perturbation
Discrete flow:
possible failure
Theorem (M. and Verdier)
If discrete flow
then all integrals are nearly conserved
Requirement for KAM:
Exact flow:
Action-Angle variables
KAM stable tori
reversible perturbation
Discrete flow:
possible failure
Theorem (M. and Verdier)
If discrete flow
then all integrals are nearly conserved
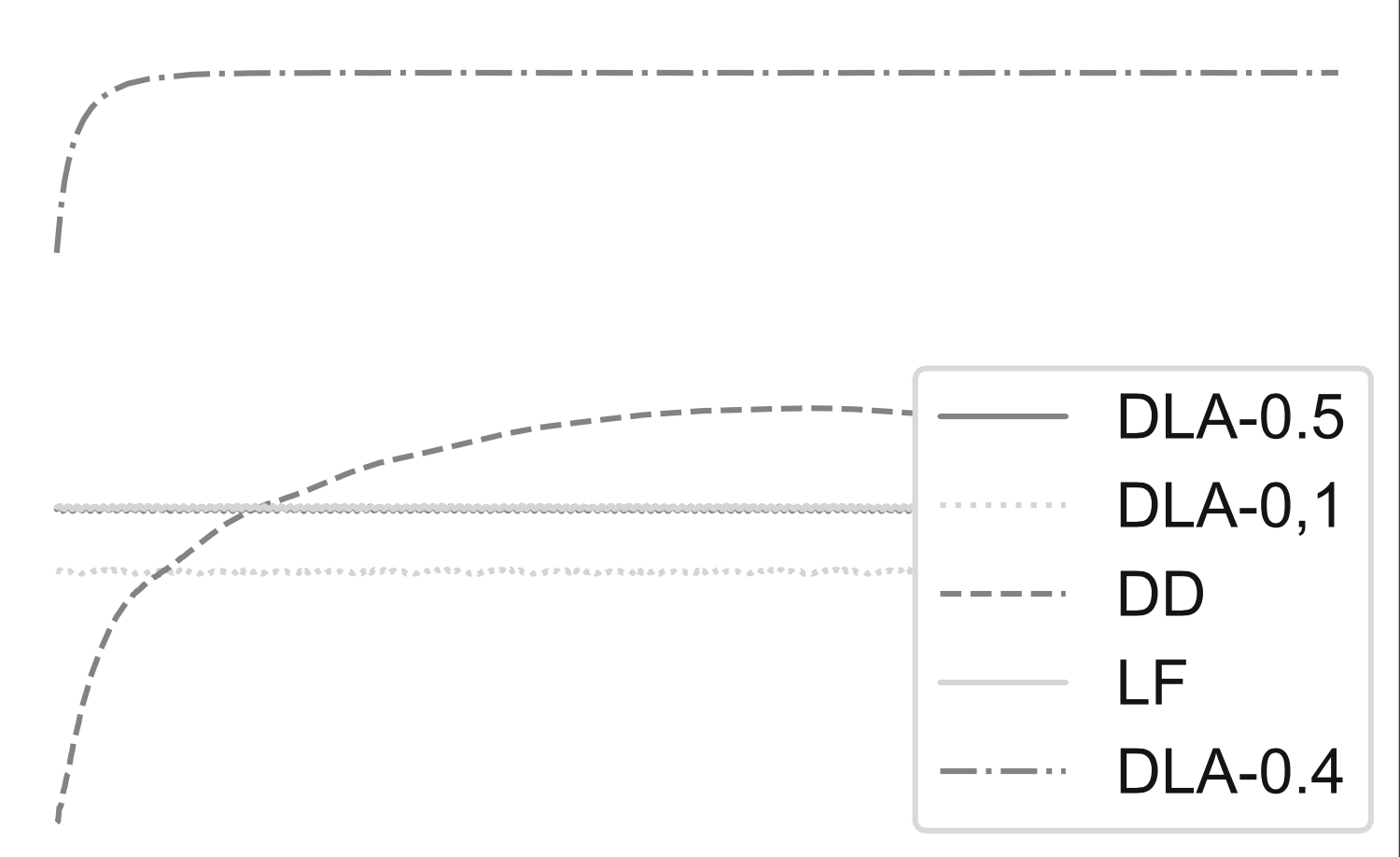
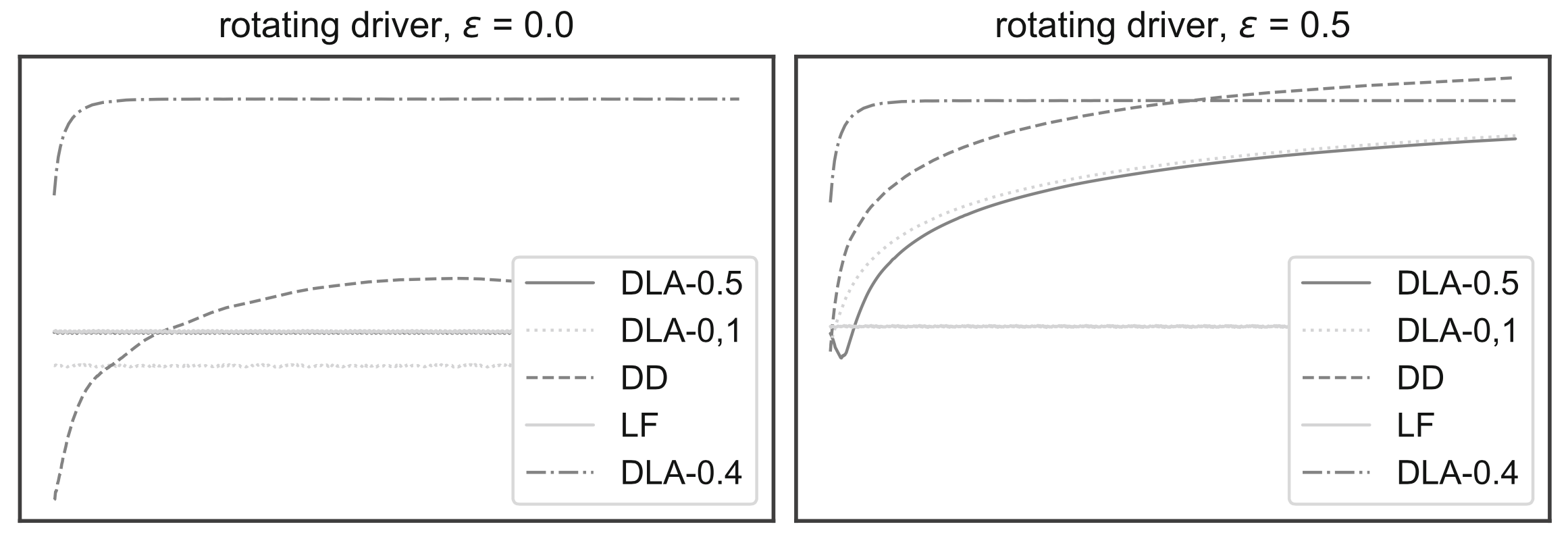
CVT problem
Sub-energy \(E_1\)
Time
Strategy: construct NCS by perturbing
IMPORTANT: resulting systems are still integrable NCS
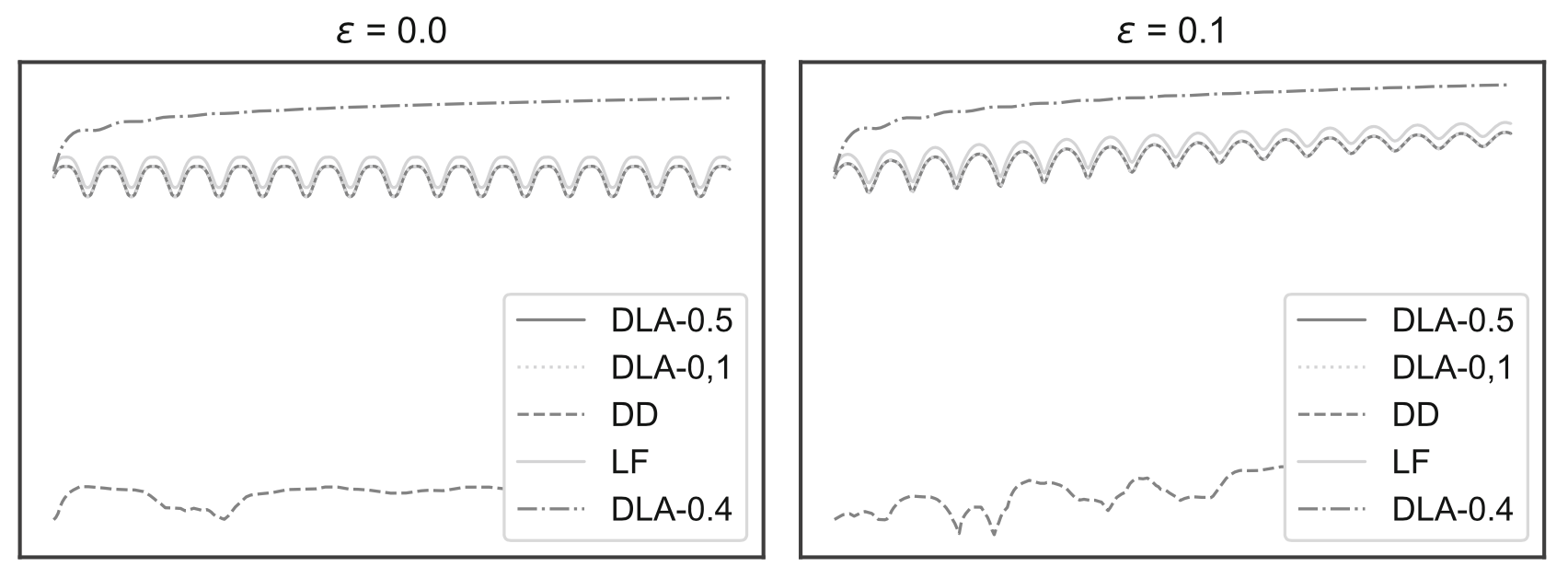
Knife edge, perturbed fibration
Total energy
Strategy: construct NCS by perturbing
IMPORTANT: resulting systems are still integrable NCS
CVT, perturbed reversibility
Sub-energy \(E_1\)
Slides available at: slides.com/kmodin
By Klas Modin
Online-presentation given 2021-05 in the Geometry, Dynamics, and Mechanics Seminar.




