


Klas Modin PRO
Mathematician at Chalmers University of Technology and the University of Gothenburg
Find transformation warping \(I_0\) to \(I_1\)
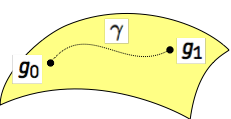
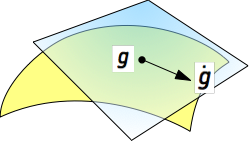
Geodesics on Lie group \(G\)
Right-invariant metric
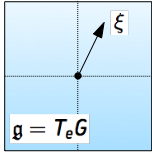
defined by \(\mathcal A: \mathfrak{g}\to\mathfrak{g}^* \)
Euler-Poincaré equation
in variable \(\xi=g'\cdot g^{-1} \)
\[\mathcal A \xi'+\mathrm{ad}^*_\xi \mathcal A\xi = 0\]
Rigid body
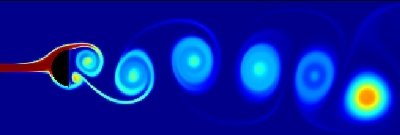
Incompressible Euler equations
Lie group \(G\) with left action on manifold \(Q\)
Minimization problem
Right-invariant metric on \(G\) defined by \(\mathcal A: \mathfrak{g}\to \mathfrak{g}^*\)
Distance function \(d_Q\) on \(Q\)
Minimization problem
(Large Deformation Diffeomorphic Metric Matching)
Reformulation as curve on \(\mathfrak{g}\)
Lemma:
Minimizer \(\xi(t)\) fulfills the Euler-Poincaré equation
Proof:
Approach 1
Gradient flow on curve \(v = v(t)\)
Approach 2
Geodesic shooting to minimize \(d_Q^2(\varphi(1)\cdot q_0,q_1)\)
Both are expensive!
Right-invariant metric on \(G\) defined by \(\mathcal A: \mathfrak{g}\to \mathfrak{g}^*\)
Distance function \(d_S\) on \(S\)
Minimization problem
Origin of expensiveness: no formula for \(d_G\)
Regularization element \(r\in R\)
\(G\) acts on \(Q = S\times R \)
\( E(g) = F_{q_1}(g\cdot q_0)\) where \(q_i = (s_i,r)\)
Def: momentum map \(J: T^*Q\to \mathfrak{g}^* \) for cotangent lifted action
Proposition: gradient flow is
Gradient flow
Lie-Euler method
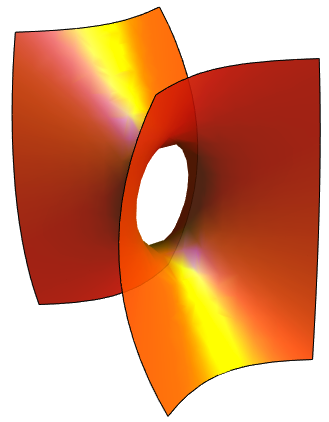
horizontal slice
fiber
fiber
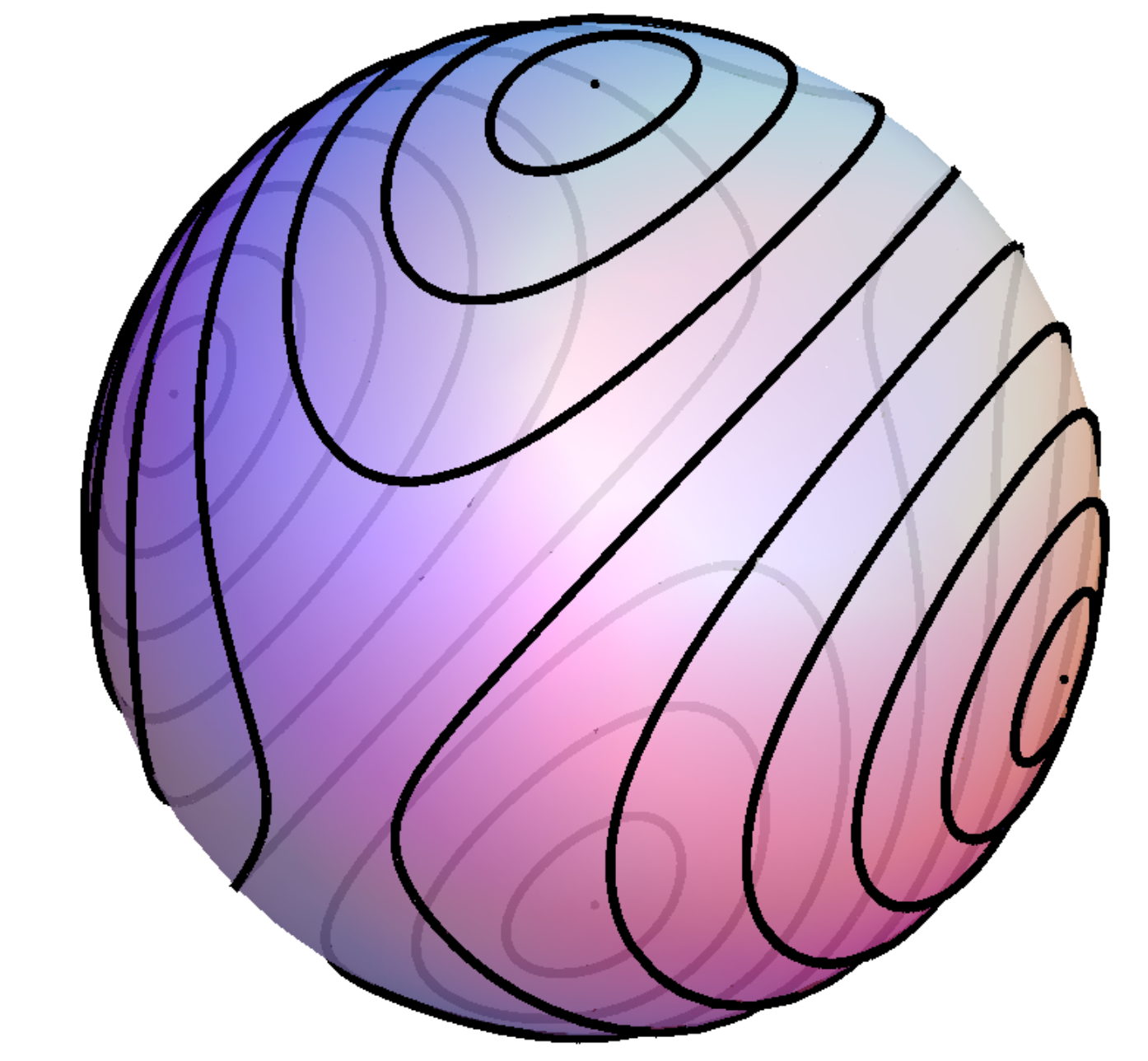
Take \(G = \mathrm{GL}(n)\) and \(Q = P(n)\)
By Klas Modin
Presentation given at the MaGIC meeting in Vatnahalsen, Norway, 2017-03-04




