Lie-Jordan splitting iteration methods for systems of linear equations
Milo Viviani (joint work with prof. Michele Benzi)
Scuola Normale Superiore - Pisa
UMI23
Pisa, 04-09 September 2023
Motivation
A x = b
Solution of (large) linear systems
- \(A\in\mathbb{M}_n(\mathbb{C})\) and \(x,b\in \mathbb{C}^n\)
- \(A\) is large non-Hermitian positive definite
(\alpha I + H) x_{n+1/2} = (\alpha I - S) x_{n} + b\\
(\alpha I + S) x_{n+1} = (\alpha I - H) x_{n+1/2} + b
Let \(A = H + S\), where \(H=\frac{A+A^*}{2}\) and \(S=\frac{A-A^*}{2}\)
HSS algorithm (Bai, Golub and Ng, 2003)
HSS algortihm
(\alpha I + H) x_{n+1/2} = (\alpha I - S) x_{n} + b\\
(\alpha I + S) x_{n+1} = (\alpha I - H) x_{n+1/2} + b
- Unconditionally convergent to the solution of \(Ax=b\), for any \(\alpha>0\)
- Upper bound of the contraction factor depends on \(\sigma(H)\) but not on \(\sigma(S)\)
- Optimal \(\alpha\) is given by \(\alpha_{opt}:=\sqrt{\lambda_{max}(H)\lambda_{min}(H)}\)
- The two-step iteration is solved via some CG + Krylov subspace method (IHSS)
- Efficient solver for saddle-point problems for discretized elliptic PDEs (Benzi, Gander and Golub, 2003)
Skew shifted HSS algortihm (Greif, 2022)
(\alpha J + H) x_{n+1/2} = (\alpha J - S) x_{n} + b\\
(\alpha J + S) x_{n+1} = (\alpha J - H) x_{n+1/2} + b
- \(J\) is the standard symplectic matrix
- Not unconditionally convergent to the solution of \(Ax=b\), but there is a critical value for \(\alpha\) depending on the eigenvalues of the skew-Hamiltonian matrix \(JS\)
or
(\alpha I + H) x_{n+1/2} = (\alpha I - S) x_{n} + b\\
(\alpha J + S) x_{n+1} = (\alpha J - H) x_{n+1/2} + b
(1)
(2)
Skew shifted HSS algortihm (Greif, 2022)
Rmk. The scheme (1) is equivalent to
(\alpha I - JH) x_{n+1/2} = (\alpha I + JS) x_{n} - Jb\\
(\alpha I - JS) x_{n+1} = (\alpha I + JH) x_{n+1/2} - Jb
which corresponds to the splitting of \(JA\) in the Hamiltonian and skew-Hamiltonian parts \(JH\) and \(JS\)
Rmk. Hermitian and skew-Hermitian and skew-Hamiltonian and Hamiltonian are of Jordan and Lie algebras pairs
Q. How the Lie-Jordan theory is linked to the HSS scheme?
Lie and Jordan algebras
Def. A Lie algebra \(\mathfrak{g}\) is a vector space with a bilinear operator \([\cdot,\cdot]:\mathfrak{g}\times\mathfrak{g}\rightarrow\mathfrak{g}\), such that for all \(A,B,C\in\mathfrak{g}\):
- \([[A,B],C] + [[B,C],A] + [[C,A],B] = 0\) (Jacobi)
- \([A,B] = - [B,A] \)
Def. A Jordan algebra \((\mathbb{J},\circ)\) is a non-associative algebra over a field, such that for all \(A,B\in \mathbb{J}\):
- \(A\circ B = B\circ A\)
- \((A\circ B)\circ A^2 = A\circ ( B\circ A^2)\)
Es. \(\mathbb{M}_n(\mathbb{R})\) is both a Lie and Jordan algebra, w.r.t. to the commutator and anti-commutator
Lie-Jordan splitting
Key ingredient: any \(A\in\mathbb{M}_n(\mathbb{R})\) can be uniquely decomposed in a symmetric and a skew-symmetric part
\(\mathbb{M}_n(\mathbb{R})\cong\mathfrak{so}_n(\mathbb{R}) \oplus sym_n(\mathbb{R})\)
- \(\mathfrak{so}_n(\mathbb{R}) \) is a real Lie algebra w.r.t. the matrix commutator \([A,B]=AB-BA\)
- \(sym_n(\mathbb{R})\) is a real Jordan algebra w.r.t. the matrix anticommutator \( A\circ B = AB+BA\)
- The splitting above is known as the Polar decomposition at the algebra level or the Cartan decomposition w.r.t. the involution \(\cdot^T\)
Lie-Jordan splitting
More generally, given any \(J\in\mathbb{M}_n(\mathbb{R})\) invertible symmetric or skew-symmetric, we get a pair of quadratic Lie and Jordan algebras
where
\(\mathfrak{g}_J:=\lbrace A\in\mathbb{M}_n(\mathbb{R})\) such that \(A^TJ + JA=0\rbrace\)
\(\mathbb{J}:=\lbrace A\in\mathbb{M}_n(\mathbb{R})\) such that \(A^TJ - JA=0\rbrace\)
\(\mathbb{M}_n(\mathbb{R})\cong\mathfrak{g}_J \oplus_S \mathbb{J}\)
- The splitting is orthogonal w.r.t.: \(<A,B>_S :=Tr(A^TSB)\), where \(S=JJ^T\)
J-HSS scheme
Let \(A = H + S\), where \(H=\frac{J^{-1}(A^TJ+JA)}{2}\) and \(S=\frac{J^{-1}(A^TJ-JA)}{2}\)
(\alpha J^{-1} + H) x_{n+1/2} = (\alpha J^{-1} - S) x_{n} + b\\
(\alpha J^{-1} + S) x_{n+1} = (\alpha J^{-1} - H) x_{n+1/2} + b
Thm.
- Let \(J\) be symmetric. Then, the scheme above converges toward the solution of \(Ax=b\) if \(max_{\lambda\in\sigma(JH)}|\frac{\alpha-\lambda}{\alpha + \lambda}|<1\)
- Let \(J\) be skew-symmetric. Then, the scheme above converges toward the solution of \(Ax=b\) if \(max_{\lambda\in\sigma(JS)}|\frac{\alpha-\lambda}{\alpha + \lambda}|<1\)
J-HSS scheme
- By the Sylvester's inertia theorem, when \(J\) is congruent to a diagonal matrix with zeros and \(\pm 1\) equal to the rank of \(J\), whereas when J is skew is a block diagonal with zeros and symplectic blocks equal to half the rank of \(J\). Hence, in this case the Lie algebra g is isomorphic to \(\mathfrak{u}(p,q)\) or \(\mathfrak{sp}(n)\).
- \(J\) neither symmetric or skew can be reconducted to the previous case
- Considering \(JAx=Jb\), brings us to the classical HSS scheme
Q. Are there Lie-Jordan splitting not isomorphic to the Hermitian and skew-Hermitian one?
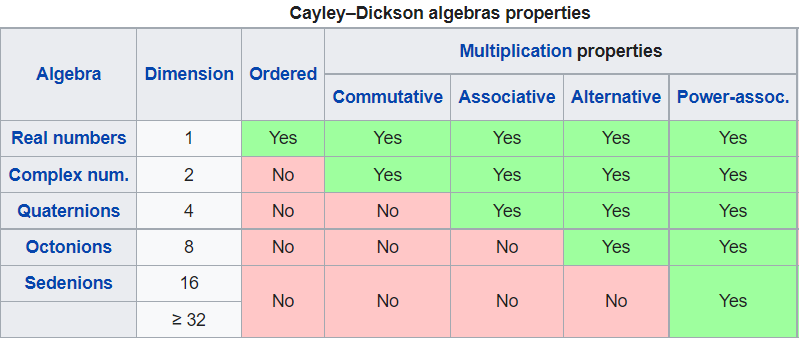
Formally real Jordan algebras
In 1934, Jordan, Von Neumann and Wigner classified the simple formally real Jordan algebras, i.e. real Jordan algebras such that:
if \(A_1^2+A_2^2+...+A_n^2=0\), then \(A_1=A_2=...=A_n=0\)
They are of three kinds:
- Hermitian matrices for any \(n\geq 1\) with coefficients in \(\mathbb{R},\mathbb{C},\mathbb{H}\)
- \(JSpin_n\): \(\mathbb{R}\textbf{1}\oplus\mathbb{R}^n\) with \((a\textbf{1},\textbf{v})\circ(b\textbf{1},\textbf{w})=((ab+<\textbf{v},\textbf{w}>)\textbf{1},a\textbf{v}+b\textbf{w})\)
- Hermitian matrices for \(n=3\) with coefficients in \(\mathbb{O}\) [Albert algebra]
Rmk.
- \(JSpin_n\) can be embedded in \(sym_{2^n}(\mathbb{R})\)
- The Albert algebra is the only formally real exceptional algebra, since it cannot be embedded in a associative algebra
Formally real Jordan algebras
- The Hermitian and skew-Hermitian splitting and the relative HSS scheme can be extended to matrix with coefficients in \(\mathbb{R},\mathbb{C},\mathbb{H}\)
- \(\mathbb{M}_n(\mathbb{H})\cong\mathbb{M}_{2n}(\mathbb{C})\), hence all the analysis for quaternionic matrices can be performed using complex matrices
- A \(JSpin_n\) Jordan algebra has a Lie algebra complement \(\mathfrak{g}\subset\mathfrak{so}(2^n)\)
- The Albert algebra is not clearly treatable, since it cannot be represented via real or complex matrix calculus
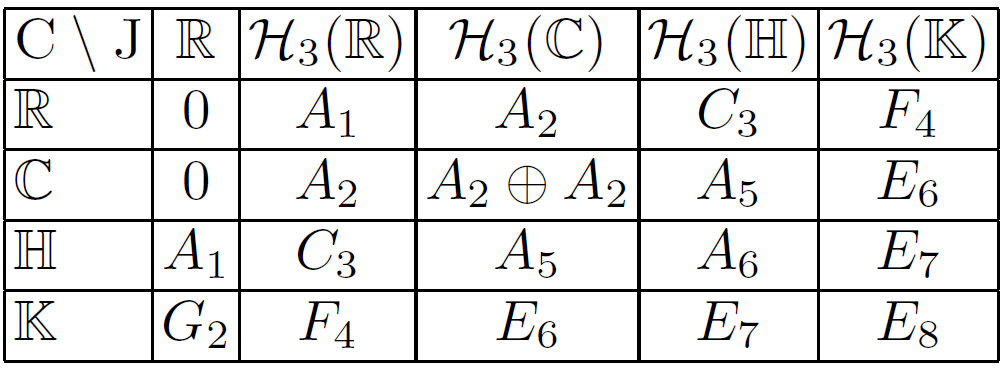
Freudenthal-Tits magic square
- Another way to associate a Lie algebra to a Jordan algebra \(\mathbb{J}\) is to define the structure algebra \(str(\mathbb{J})=\mathbb{J}\oplus Der(\mathbb{J})\).
Es. \(\mathbb{J}=sym_n(\mathbb{R})\) has \(Der(\mathbb{J})\cong\mathfrak{so}(n)\) and \(str(\mathbb{J})\cong\mathbb{M}_n(\mathbb{R})\)
- The Freudenthal-Tits construction \(FT (C, J) := Der(C)⊕(C0⊗J0)⊕Der(J)\) links \(3\times 3\) Hermitian matrices to semisimple Lie algebras
Conclusions and future work
- The HSS scheme can be directly extended to J-quadratic Lie and Jordan algebras
- The HSS scheme works for Hermitian matrices with coefficients in \(\mathbb{R},\mathbb{C},\mathbb{H}\)
- Is there any case in which is convenient to consider the \(JSpin_n\) structure and its Lie algebra complement?
- The exceptional cases emerge while considering octonions, but only for dimension 3, which makes the interest for iterative schemes purely academic
- Extend the analysis of the HSS algorithm for any real Jordan algebra of matrices, considering the structure algebra \(str(\mathbb{J})=\mathbb{J}\oplus Der(\mathbb{J})\)
Lie-Jordan splitting iteration methods for systems of linear equations
By Milo Viviani




