Solving cubic matrix equations arising in conservative dynamics
Milo Viviani (joint work with prof. Michele Benzi)
Scuola Normale Superiore - Pisa
Due Giorni di Algebra Lineare Numerica e Applicazioni
Napoli, 14-15 Febbraio 2022
Introduction
Isospectral flows
\dot{Y} = [\mathcal{L} Y,Y]\\
Y(0)=Y_0
- \(Y_0\in \mathbb{M}(N,\mathbb{C})\), \(\mathcal{L}:\mathbb{M}(N,\mathbb{C})\rightarrow\mathbb{M}(N,\mathbb{C})\) linear
- \([A,B] = AB - BA\)
- The spectrum of \(Y\) is time-invariant
- \(\mathcal{L}\) self-adjoint w.r.t. Frobenious inner product \(\Rightarrow\) flow Hamiltonian w.r.t. \(H=\frac{1}{2}Tr(\mathcal{L}YY^*)\)
Examples
- Euler equations of ideal fluid dynamics
\(\mathcal{L}=\Delta_N^{-1}\), \(Y\in\mathfrak{su}(N)\) - Drift-Alfvén plasma
\(\mathcal{L}=(\Delta_N^{-1}(\cdot_1 + \cdot_2),\frac{1}{\lambda}(\Delta_N-\frac{1}{\lambda^2})^{-1}(\cdot_1 - \cdot_2))\),
\(Y\in\mathfrak{su}(N)\oplus\mathfrak{su}(N)\) - Heisenberg spin chain
\(\mathcal{L}=(\cdot_N+\cdot_2,\cdot_1+\cdot_3,\dots,\cdot_{N-1}+\cdot_1)\),
\(Y\in\mathfrak{su}(2)^{\oplus_N}\) - Rmk. Assume \(\mathcal{L}(\cdot)\) to be fast to evaluate
Geometric integration of isospectral flows
(I - h \mathcal{L} X_n)X_n(I + h \mathcal{L} X_n) := Y_n\\
(I + h \mathcal{L} X_n)X_n(I - h \mathcal{L} X_n) =: Y_{n+1}
- Second order in time (\(h\) is the time-step)
- Spectrum of \(Y\) exactly preserved
- Hamiltonian conserved up to \(\mathcal{O}(h^2)\)
Geometric integration of isospectral flows
\mathfrak{g}_J=\lbrace Y\in\mathbb{M}(N,\mathbb{C})\mid YJ+JY^*=0\rbrace
- \(\mathcal{L}:\mathfrak{g}_J\rightarrow\mathfrak{g}_J\Rightarrow\)the numerical scheme above restricts to a discrete flow on \(\mathfrak{g}_J\)
- Main examples \(\mathfrak{u}(N)\), \(\mathfrak{sp}(N)\), \(\mathfrak{o}(N)\)
\(J-\)quadratic Lie algebras
Cubic equation
(I - h\mathcal{L} X)X(I + h \mathcal{L}X) = Y \ \ (*)
- \(X\) unknown
- \(Y\in \mathbb{M}(N,\mathbb{R}) \ or \ \mathbb{M}(N,\mathbb{C})\) given
Thm. Given \(Y\in\mathbb{M}(N,\mathbb{C})\), equation (*) has a unique solution for sufficiently small \(h>0\) in some neighbourhood of \(Y\).
Furthermore, when equation (*) takes place in \(\mathfrak{su}(N)\), there exists such a neighbourhood for any \(h\leq\frac{1}{3\|\mathcal{L}\|_{op}\|Y\|}\).
proof.
X = F_h(X)\\
F_h(X):=Y + h[\mathcal{L} X,X] + h^2\mathcal{L} X X \mathcal{L}X
- Existence: apply Peano local existence theorem to
Write equation (*) as the fixed point problem
X'(h) = G_h^{-1}(X(h))\left[\frac{\partial F_h}{\partial h}(X(h))\right]\\
X(0) = Y
where \(G_h=I -\frac{\partial F_h}{\partial X}\)
proof.
- Uniquenss: apply Banach-Caccioppoli theorem for \(F_h\) in the neighbourhood of \((0,X)\), where \(X\) is a fixed point
A:=(0,X)+\lbrace (h,Z)\vert\hspace{.3cm} \\
h\|\mathcal{L}\|_{op}(\|X\|+\|X+Z\|)+h^2\|\mathcal{L}\|_{op}^2\\
(\| X\|^2+\|X\|\|X+Z\|+\|X+Z\|^2)<1\rbrace
- Take \(Z\) such that \(X+Z = Y\) and get a bound for \(h\) to get the desired neighbourhood of \(Y\)
proof.
- \(X,Y\in\mathfrak{su}(N)\): evaluate the Frobenius norm of \(Y\)
\|Y\|^2=Tr(X(I - (h\mathcal{L} X)^2)(I - (h\mathcal{L} X)^2)X^*)
- \( - (h\mathcal{L} X)^2\) is positive semidefinite (matrices in \(\mathfrak{su}(N)\) have purely imaginary eigenvalues
- Hence \(\|X\|\leq \|Y\|\)
- Replacing \(\|Y\|\) to \(\|X\|\) and \(\|X+Z\|\) in the previous inequality gives the bound for \(h\)
Numerical schemes
Explicit fixed point iteration
X_{k+1}:=Y + h[\mathcal{L} X_k,X_k] + h^2\mathcal{L} X_k X_k \mathcal{L}X_k
- Convergence is guaranteed by the Theorem above, for \(h\) sufficiently small and \(X_0:=Y\)
- The complexity is \(\mathcal{O}(N^3)\)
- Only two matrices multiplications are required when working in \(\mathfrak{su}(N)\)
Linear iteration
P_k := \mathcal{L}X_k\\
(I - hP_k)X_{k+1}(I + h P_k) := Y
- Convergence can be derived by the Theorem above, for \(h\) sufficiently small and \(X_0:=Y\)
- The complexity is \(\mathcal{O}(N^3)\)
- To solve the second equation we take the LU-factorization of \(I\pm hP_k\)
Inexact Newton iteration
G(X)=0
\(G(X):=X - h[\mathcal{L} X,X]- h^2(\mathcal{L} X)X(\mathcal{L} X) - Y\)
\(DG(X)=I - h(\mathcal{B}_1 + h\mathcal{B}_2)\)
\(\mathcal{B}_2=(\mathcal{L}\cdot)X(\mathcal{L}X)+(\mathcal{L}X)\cdot(\mathcal{L}X)+(\mathcal{L}X)X(\mathcal{L}\cdot)\)
\(\mathcal{B}_1=[\mathcal{L}\cdot,X]+[\mathcal{L}X,\cdot]\)
Inexact Newton iteration
Need an approximation for \(DG(X)^{-1}\)
- \(DG(X)^{-1}\approx I + h\mathcal{B}_1\) [Exact 1st order]
- \(DG(X)^{-1}\approx I + h\mathcal{B}_1 + h^2\mathcal{B}_2\)
- \(DG(X)^{-1}\approx I + h\mathcal{B}_1 + h^2\mathcal{B}_1^2\)
- \(DG(X)^{-1}\approx I + h\mathcal{B}_1 + h^2(\mathcal{B}_1^2+\mathcal{B}_2)\) [Exact 2nd order]
Rmk. the second one is the best compromise between exactness and computational cost
- The total complexity is \(\mathcal{O}(N^3)\)
Numerical experiments
Euler Equations
Spatial semidiscretization of the Euler equations on a compact orientable surface \(S\), \(\omega_t\in C^\infty(S)\)
\(\dot{\omega}=\nabla\omega\cdot\nabla^\perp\Delta^{-1}\omega\)
Give the Hamiltonian isospectral flow on \(\mathfrak{su}(N)\), for \(N\geq 1\)
\(\dot{W}=[W,\Delta_N^{-1}W]\)
Rmk. \(\Delta_N\) is tridiagonal, the evaluation of \(\Delta_N^{-1}W\) (via LU-factorization done once) requires \(\mathcal{O}(N^2)\) operations
Euler Equations
Time-step \(h=0.5\), normalized initial data
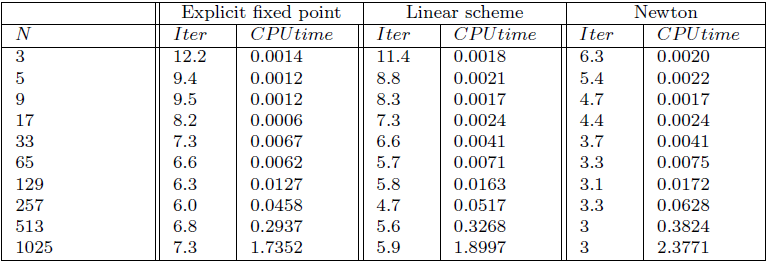
Rmk. Explicit fixed point performs the best in terms of CPU time
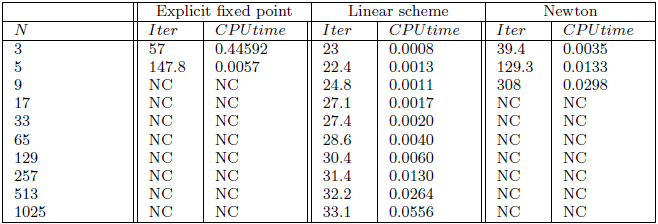
Heisenberg spin chain
Spatial semidiscretization of the Landau–Lifshitz–Gilbert Hamiltonian PDE, \(\sigma_t:S^1\rightarrow S^2\)
\(\dot{\sigma}=\sigma\times\partial_{xx}\sigma\)
Give the Hamiltonian isospectral flow on \(\mathfrak{su}(2)^{\oplus_N}\), for \(N\geq 1\)
\(\dot{S}_i=[S_i,S_{i-1}+S_{i+1}]\)
for \(i=1,...,N\) with \(S_1\equiv S_N\)
Time-step \(h=0.5\), normalized initial data
Rmk. Explicit fixed point performs the best in terms of stabilty and CPU time.
Heisenberg spin chain
An unpractical scheme
Quadratic iteration
(I - h P_k)X_k(I + h P_k) := Y\\
\mathcal{L} X_{k+1} := P_k
-
The first equation is CARE (Continuous Algebraic Riccati Equation) in \(P_k\)
- Non-uniqueness issues
h^2PXP + h[P,X] + Y - X = 0
Quadratic iteration
non-uniqueness issues
Prop. Let \(A,B\in\mathfrak{su}(N)\) be non-singular, with signature matrix equal to \(I_{p,N-p}\).
Then, the equation \(ZAZ^*=B\) has solution \(Z\in GL(N,\mathbb{C})\) if and only if \(Z=C U D\), for some \(U\in U(p,N-p)\) and \(C,D\) non-singular such that \(B = C I_{p,N-p} C^*\) and \(DA D^*= I_{p,N-p}\).
Ex. Search for \(Z=I + P\), for \(P\) skew-Hermitian.
Let \(A,B\) diagonal s.t. \(i(A-B)\geq 0\).
Then, any \(P\) diagonal skew-hermitian (i.e. purely imaginary) such that \(P^2=BA^{-1}-I\) is a solution.
For generic \(A,B\) as above, we get \(2^N\) solutions.
Conclusions
Conclusions
- Iterative schemes for the solution of cubic matrix equations arising in the numerical solution of certain conservative PDEs
- Geometrical integrators: preservation of important physical features
- Both fixed point iterations and inexact Newton work well
- Fixed point iterations more efficient for large time-step and large dimensions
- Implicit fixed point iteration is more stable
Thanks for your attention
Solving cubic matrix equations arising in conservative dynamics_short
By Milo Viviani




