An introduction to automatic differentiation
[Baydin et al., 2015, Automatic differentiation in machine learning: a survey]
Automatic differentiation ?
- Method to compute the differential of a function using a computer
Input
def f(x):
return x ** 2
f(1.)
>>>> 1.Output
g = grad(f)
g(1.)
>>>> 2.0Automatic differentiation ?
- Method to compute the differential of a function using a computer
Input
def f(x):
return np.log(1 + x ** 2) / x
f(1.)
>>>> 0.6931471805599453Output
g = grad(f)
g(1.)
>>>> 0.3068528194400547Prototypical case
\(f\) defined recursively:
- \(f_0(x) = x\)
- \(f_{k+1}(x) = 4 f_{k}(x) (1 - f_k(x))\)
Input
def f(x, n=4):
v = x
for i in range(n):
v = 4 * v * (1 - v)
return v
f(0.25)
>>>> 0.75Output
g = grad(f)
g(0.25)
>>>> -16.0Automatic differentiation is not...
Numerical differentiation
$$f'(x) \simeq \frac{f(x + h) - f(x)}{h}$$
In higher dimension:
$$ \frac{\partial f} {\partial x_i} (\mathbf{x}) \simeq \frac{f(\mathbf{x} + h \mathbf{e}_i) - f(\mathbf{x})}{h}$$
Drawbacks:
- Computing \(\nabla f = [\frac{\partial f}{\partial x_1}, \cdots, \frac{\partial f}{\partial x_n}]\) takes \(n\) computations
- Inexact method
- How to choose \(h\)?
Automatic differentiation is not...
Numerical differentiation
Example:
from scipy.optimize import approx_fprime
approx_fprime(0.25, f, 1e-7)
>>>> -16.00001599
Automatic differentiation is not...
Symbolic differentiation
- Takes as input a function specified as symbolic operations
- Apply the usual rules of differentiation to give the derivative as symbolic operations
Example:
\(f_4(x) = 64x(1−x)(1−2x)^2 (1−8x+ 8x^2 )^2\), so:
f'_4(x) = 128x(1 − x)(−8 + 16x)(1 − 2x)^2(1 − 8x+ 8x^2)+ 64(1−x)(1−2x)^2(1−8x+ 8x^2)^2−64x(1 − 2x)^2(1 − 8x+ 8x^2)^2 − 256x(1 − x)(1 −2x)(1 − 8x + 8x^2
)^2
Then, evaluate \(f'(x)\)
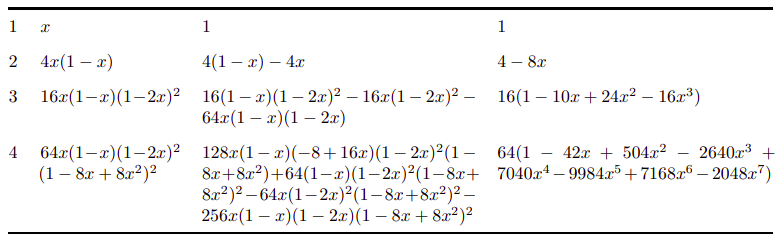
Automatic differentiation is not...
Symbolic differentiation
- Exact
- Expression swell: derivatives can have many more terms than the base function
\(f_n\) \(f'_n\) \(f'_n\) (simplified)
Automatic differentiation:
Apply symbolic differentiation at the elementary operation level and keep intermediate numerical results, in lockstep with the evaluation of the main function.
- Function = graph of elementary operations
- Follow the graph and differentiate each operation using differentiation rules (linearity, chain rule, ...)
def f(x, n=4):
v = x
for i in range(n):
v = 4 * v * (1 - v)
return v
f(0.25)
>>>> 0.75def g(x, n=4):
v, dv = x, 1.
for i in range(n):
v, dv = 4 * v * (1 - v), 4 * dv * (1 - v) - 4 * v * dv
return dv
g(0.25)
>>>> -16.0Forward automatic differentiation:
Apply symbolic differentiation at the elementary operation level and keep intermediate numerical results, in lockstep with the evaluation of the main function.
- Function = graph of elementary operations
- Follow the graph and differentiate each operation using differentiation rules (linearity, chain rule, ...)
- If \(f:\mathbb{R}\to \mathbb{R}^m\): need one pass to compute all derivatives :)
- If \(f:\mathbb{R}^n \to \mathbb{R}\): need \(n\) passes to compute all derivatives :(
- Bad for ML
Reverse automatic differentiation: Backprop
- Function = graph of elementary operations
- Compute the graph and its elements
- Go through the graph backwards to compute the derivatives
def f(x, n=4):
v = x
for i in range(n):
v = 4 * v * (1 - v)
return v
f(0.25)
>>>> 0.75def g(x, n=4):
v = x
memory = []
for i in range(n):
memory.append(v)
v = 4 * v * (1 - v)
dv = 1
for v in memory[::-1]:
dv = 4 * dv * (1 - v) - 4 * dv * v
return dv
g(0.25)
>>>> -16.0Reverse automatic differentiation: Backprop
- Function = graph of elementary operations
- Compute the graph and its elements
- Go through the graph backwards to compute the derivatives
-Only one passe to compute gradients of functions \(\mathbb{R}^n \to \mathbb{R}\) :)
Example on a 2d function
$$f(x, y) = yx^2, \enspace x = y= 1$$
Function
\(x =1\)
\(y = 1\)
\(v_1 = x^2 = 1\)
\(v_2 =yv_1 = 1\)
\(f = v_2 =1\)
Forward AD (w.r.t. \(x\))
Backprop \( \)
\(\frac{dx}{dx} =1\)
\(\frac{dy}{dx} = 0\)
\(\frac{dv_1}{dx} =2x \frac{dx}{dx} = 2\)
\(\frac{dv_2}{dx} =y\frac{dv_1}{dx} +v_1 \frac{dy}{dx} =2\)
\(\frac{df}{dx} = \frac{dv_2}{dx}=2\)
\(\frac{df}{dv_2}= 1\)
\(\frac{df}{dy} = \frac{df}{dv_2 }\frac{dv_2}{dy} = \frac{df}{dv_2 }v_1 = 1\)
\(\frac{df}{dv_1} =y\frac{df}{ dv_2} = 1\)
\(\frac{df}{dx} = 2 x \frac{df}{dv_1} = 2\)
Automatic differentiation:
- Exact
- Takes about the same time to compute the gradient and the function
- Requires memory: need to store intermediate variables
- Easy to use
- Available in Pytorch, Tensorflow, jax, package autograd with numpy
from autograd import grad
g = grad(f)
g(0.25)
>>>> -16.0
Automatic differentiation applications
Example 0: Differentiating a sequence of transforms
Let \(g_0, \dots, g_{N-1}\) a sequence of functions, and consider the transform staring from \(x\):
- \(x_0 = x\)
- \(x_{n + 1} = g_n(x_n)\) for n=0...N-1
Consider a final cost function \(G(x) = \ell(x_N)\) where \(\ell\) is differentiable.
What is the gradient of G?
Example 0: Differentiating a sequence of transforms
We can apply forward differentiation (classical chain rule):
\(x_{n+1} = g_n(x_n)\) so \(\frac{\partial x_{n+1}}{\partial x} = J_n \times \frac{\partial x_n}{\partial x}\).
Iterating this relationship:
\(\frac{\partial x_{N}}{\partial x} =J_{N-1}\times \dots\times J_0 \)
and finally \(\nabla G(x) = \nabla \ell(x_N)J_{N-1}\times \dots\times J_0 \)
\(J_n\) is the Jacobian of \(g_n\) at \(x_n\)
Example 0: Differentiating a sequence of transforms
- \(x_0 = x\)
- \(x_{n+1} = g_n(x_n)\)
- \(G(x) = \ell(x_N)\)
We have found \(\nabla G(x) = \nabla \ell(x_N)J_{N-1}\times \dots\times J_0 \)
Will backprop give us another formula?
What is the difference?
Example 1: Computing Stochastic gradients in Neural networks
Neural network with parameters \(\theta\): function \(f_{\theta}(x)\)
E.g. defined recursively:
- \(x_0 = x\)
- \(x_{k + 1} = \sigma(W_kx_k + b_k)\)
- \(f_{\theta}(x) = x_K\)
Here, \(\theta = (W_0, b_0, \dots, W_{K - 1}, b_{K-1})\).
Note! Can have much more complicated architecture
Example 1: Computing Stochastic gradients in Neural networks
- \(x_0 = x\)
- \(x_{k + 1} = \sigma(W_kx_k + b_k)\)
- \(f_{\theta}(x) = x_K\)
Supervised learning: we want \(f_{\theta}(x) \simeq y\)
We have a Training set: \((x^1, y^1), \dots, (x^n, y^n)\)
Training program: find \(\theta\) that minimizes
$$C(\theta) = \frac1n\sum_{i=1}^n \ell(f_{\theta}(x^i), y^i)$$
Example 1: Computing Stochastic gradients in Neural networks
- \(x_0 = x\)
- \(x_{k + 1} = \sigma(W_kx_k + b_k)\)
- \(f_{\theta}(x) = x_K\)
Minimize
$$C(\theta) = \frac1n\sum_{i=1}^n \ell(f_{\theta}(x^i), y^i)$$
How can we compute \(\nabla C(\theta)\)?
Autodiff ! \(C(\theta)\) is obtained by a sequence of elementary operations.
Example 1: Computing Stochastic gradients in Neural networks
- \(x_0 = x\)
- \(x_{k + 1} = \sigma(W_kx_k + b_k)\)
- \(f_{\theta}(x) = x_K\)
Autodiff is used everywhere in modern machine learning.
Memory issues! To apply bacward autodiff, need to store all intermediate activations \(x_k\): sometimes very costly.
Much more expensive to train than to simply evaluate a neural network
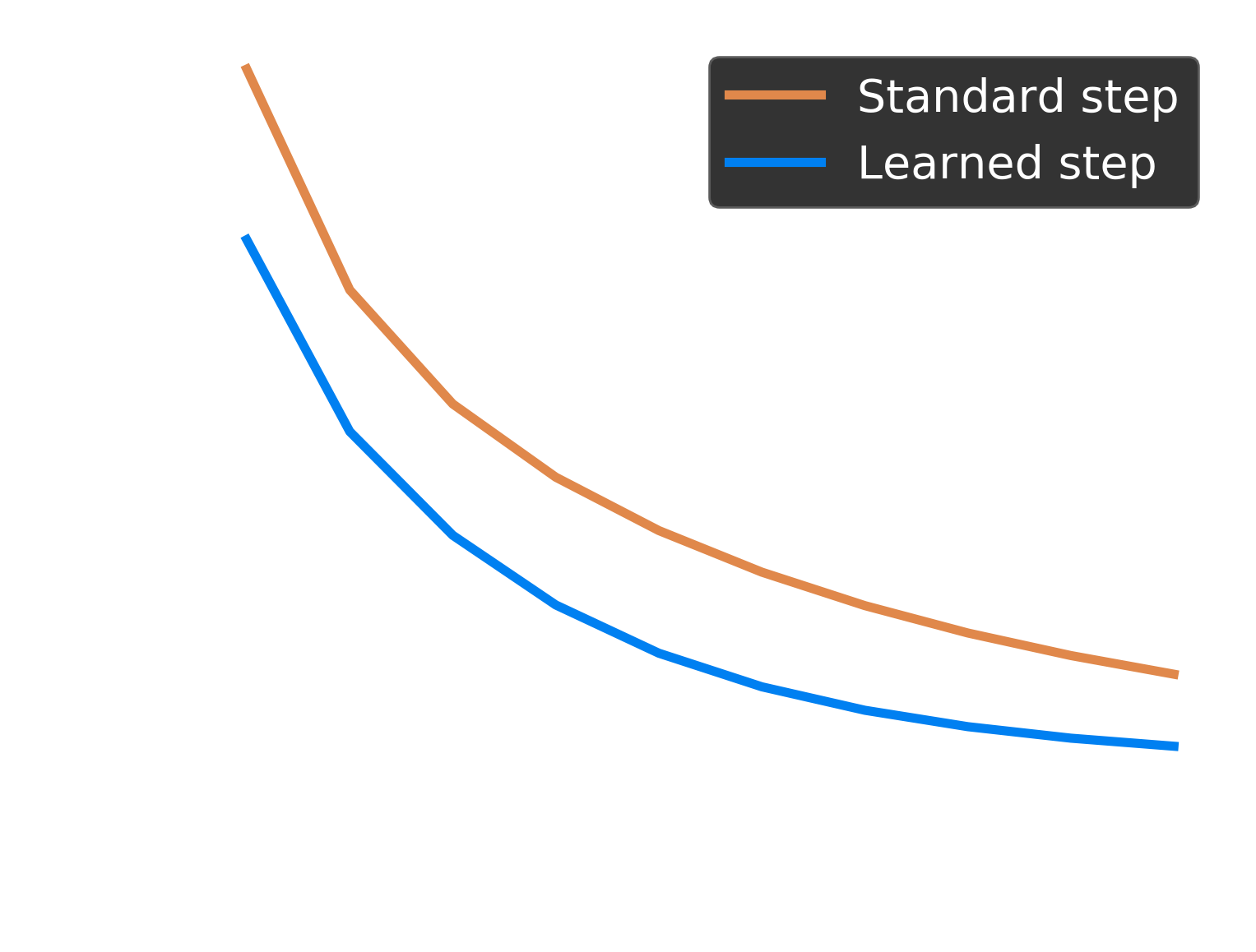
Example 2: Learning to learn
Ridge regression: minimize \(\ell(\beta) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
Gradient descent with step \(\rho > 0\) for \(T\) iterations:
- \(\beta_0 = 0\)
- \(\beta_{t+1} = \beta_t - \rho( X^{\top}(X\beta -y) + \lambda \beta)\)
We see it as a function \(GD:\rho \to \beta_T\).
What is the best \(\rho\) ?
[Gregor, Lecun, 2010, Learning Fast Approximations of Sparse Coding]
Example 2: Learning to learn
Ridge regression: minimize \(\ell(\beta) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
We want to find \(\rho\) that minimizes \(\ell(GD(\rho))\)
\(\to\) use gradient descent!
$$ \rho \leftarrow \rho - 0.01 \nabla_{\rho}\ell(GD(\rho))$$
\(\nabla_{\rho}\ell(GD(\rho))\) is computed using automatic differentiation
Example 3: hyperparameter optimization
Ridge regression: minimize \(\ell(\beta, \lambda) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
- Assume we have a test set \(X_{test}, y_{test}\). Find \(\lambda\) that minimizes test error:
$$\ell'(\lambda) = \frac12\|X_{test}\beta^*(\lambda) - y_{test}\|^2$$
subject to :
$$ \beta^*(\lambda) = \arg\min \ell(\beta, \lambda)$$
- In this simple case, closed-form solution for \(\beta\), but not in general
[Bengio, 1990, Gradient based optimization of hyperparameters]
Example 3: hyperparameter optimization
Ridge regression: minimize \(\ell(\beta, \lambda) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
$$\ell'(\lambda) = \frac12\|X_{test}\beta^*(\lambda) - y_{test}\|^2$$
subject to :
$$ \beta^*(\lambda) = \arg\min \ell(\beta, \lambda)$$
Usual approach: grid search. Select a set of candidates \(\lambda_1, \dots, \lambda_k\) and pick the one that leads to smallest test error.
Problem: In order to cover space, \(k\) grows exponentially with the number of hyperparameters
Grid search is practically useless when more than 10 hyperparameters !
Example 3: hyperparameter optimization
Ridge regression: minimize \(\ell(\beta, \lambda) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
$$\ell'(\lambda) = \frac12\|X_{test}\beta^*(\lambda) - y_{test}\|^2$$
subject to :
$$ \beta^*(\lambda) = \arg\min \ell(\beta, \lambda)$$
Idea: Use first order information
Example 3: hyperparameter optimization
Ridge regression: minimize \(\ell(\beta, \lambda) = \frac12 \| X \beta - y\|^2 + \frac\lambda 2\|\beta\|^2\)
$$ \min \ell'(\beta) = \frac12\|X_{test}\beta - y_{test}\|^2 \enspace \text{s.t.} \enspace \beta = \arg\min \ell(\beta, \lambda)$$
- Define the output of gradient descent \(GD: \lambda \to \beta\):
$$GD(\lambda) \simeq \argmin_{\beta} \ell(\beta, \lambda)$$
- Optimize \(\ell'(GD(\lambda))\) with gradient descent, using autodiff to compute the gradient
Better scaling with # of hyperparameters than grid-search
Thanks for you attention !
Intro_autodiff_psl
By Pierre Ablin




