World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #1
Problem #1
two separate world representations
-
WIRE
- OctoMap
Problem #2
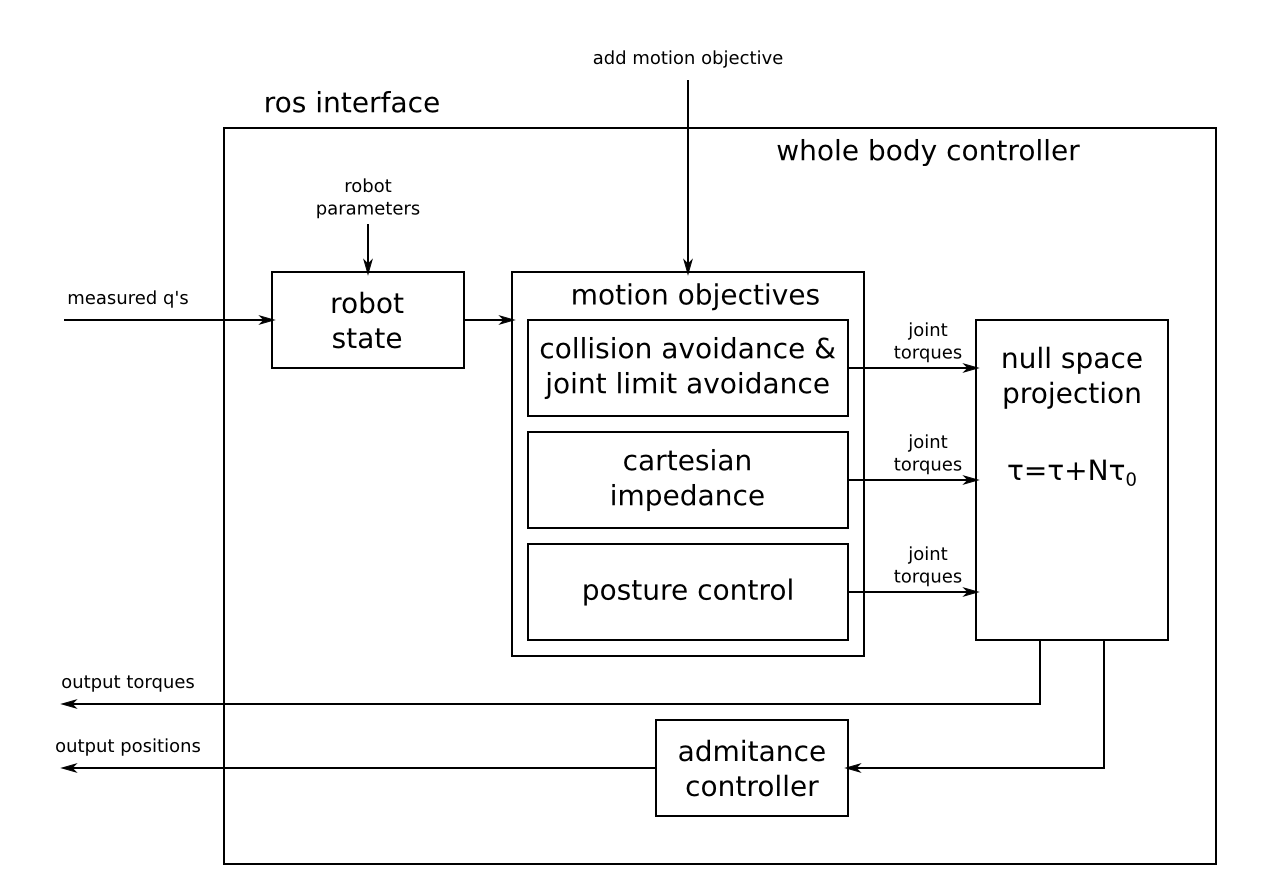
whole body controller integration
Use Cases
object pick and place

object manipulation

Problems
- collision avoidance of all objects
- unwanted noise in the OctoMap
- no volumetric information for the object
Core problems
octomap is great
sensor fusion
modeling unknown space
unrecognized objects
But is has downsides
difficult to clear voxels
no information about obstacles
Solutions?
decay unknown objects in time
use the volumetric world model to filter objects
local OctoMap for object avoidance
global OctoMap for arm planning
filter objects before or after they enter the octomap
filtering for global octomap?
Technical problems
- WBC uses primitive shapes not in URDF
- bullet library doesn't work natively with OctoMaps
- implement the FCL library
- vibrations and non-continuous forces
- no damping
- goals and collisions work on the same level
Questions?
Whole body Controller
Presentation meeting #1
By rayman