World Modeling and
Motion Planning
By Ramon Wijnands
Presentation meeting #2
Planning
- FCL integration (5 weeks)
- WBC & VWM integration (2 months)
- testing on Amigo (1 month)
- writing the report (1.5 month)
report is finished at the end of July
Collision Avoidance
current implementation: Bullet
Broadphase &
Narrowphase
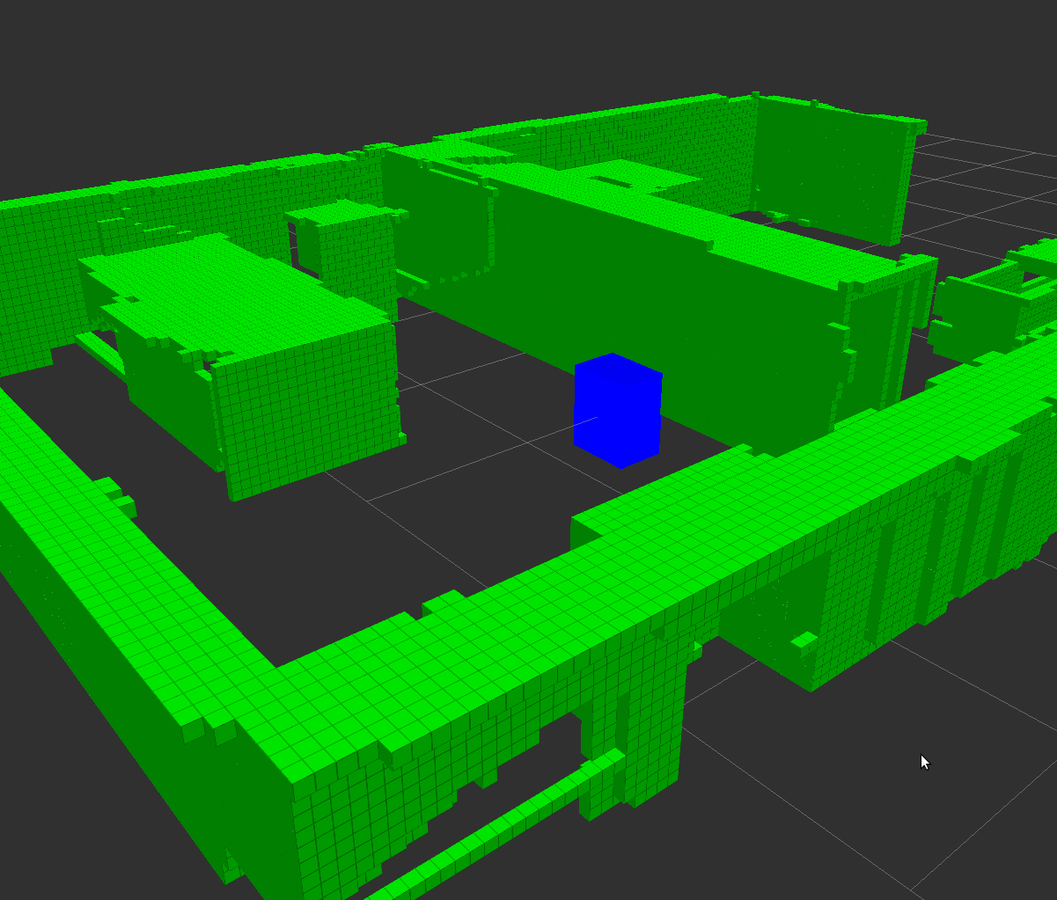
Current Implementation
only narrowphase collision checking
only on OctoMaps
FCL
- primary collision checking library used in MoveIt
- multiple proximity queries
- discrete collision detection
- continuous collision detection
- separation distance computation
- penetration depth estimation
- different model representations
- geometric shape
- mesh
- OctoMap
- flexible architecture and unified interface
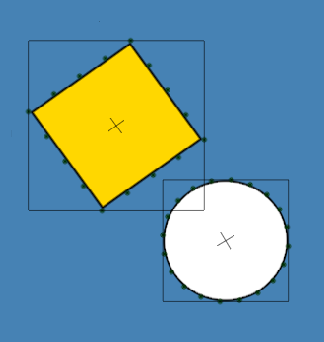
Collision scenario
Questions?
Presentation meeting #2
By rayman