World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #3
Problem statement
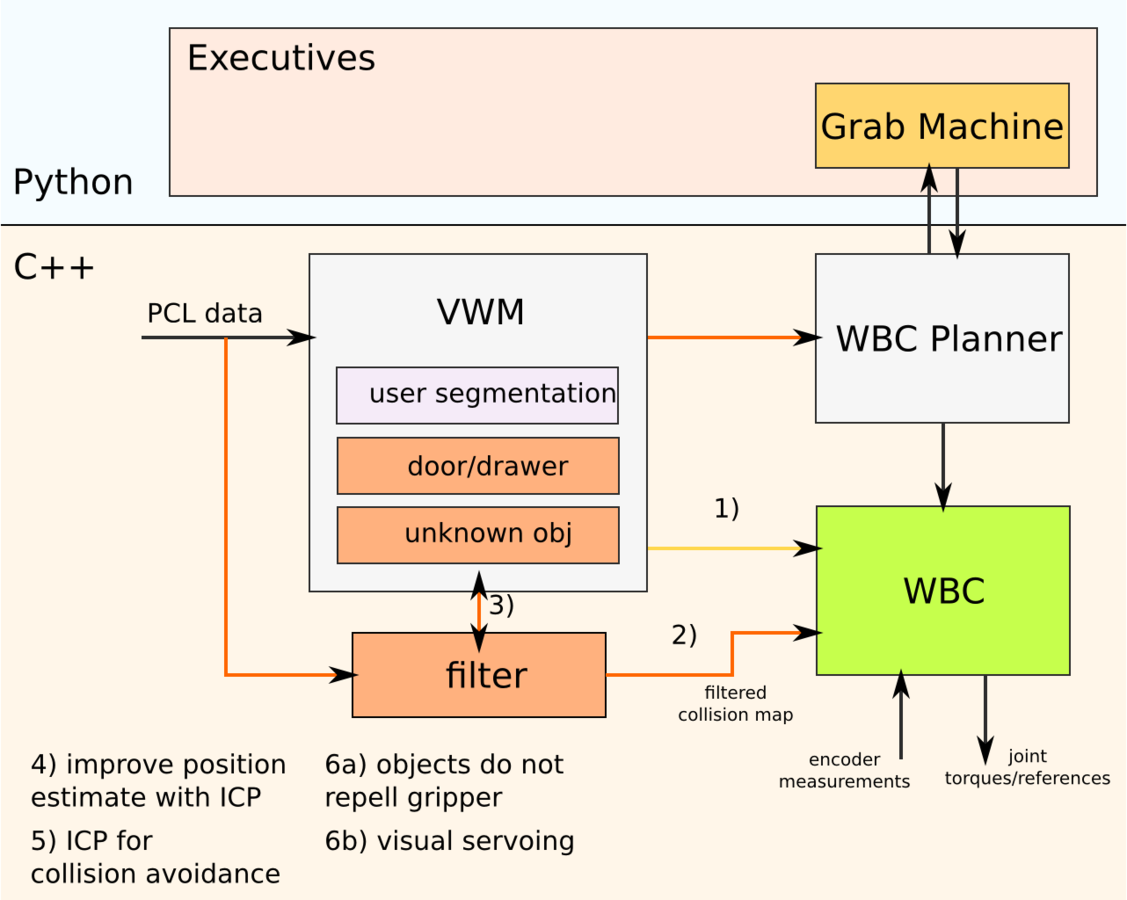
Combine a semantic, volumetric world representation with whole-body control, planning and collision avoidance
Use Cases
object pick and place

object manipulation

Problems
- current way of grabbing objects is hacky
- it cuts holes in tables
- OctoMap has a resolution of 5 cm
- navigation error results in a manipulation error
- opening a large door (safely) is impossible
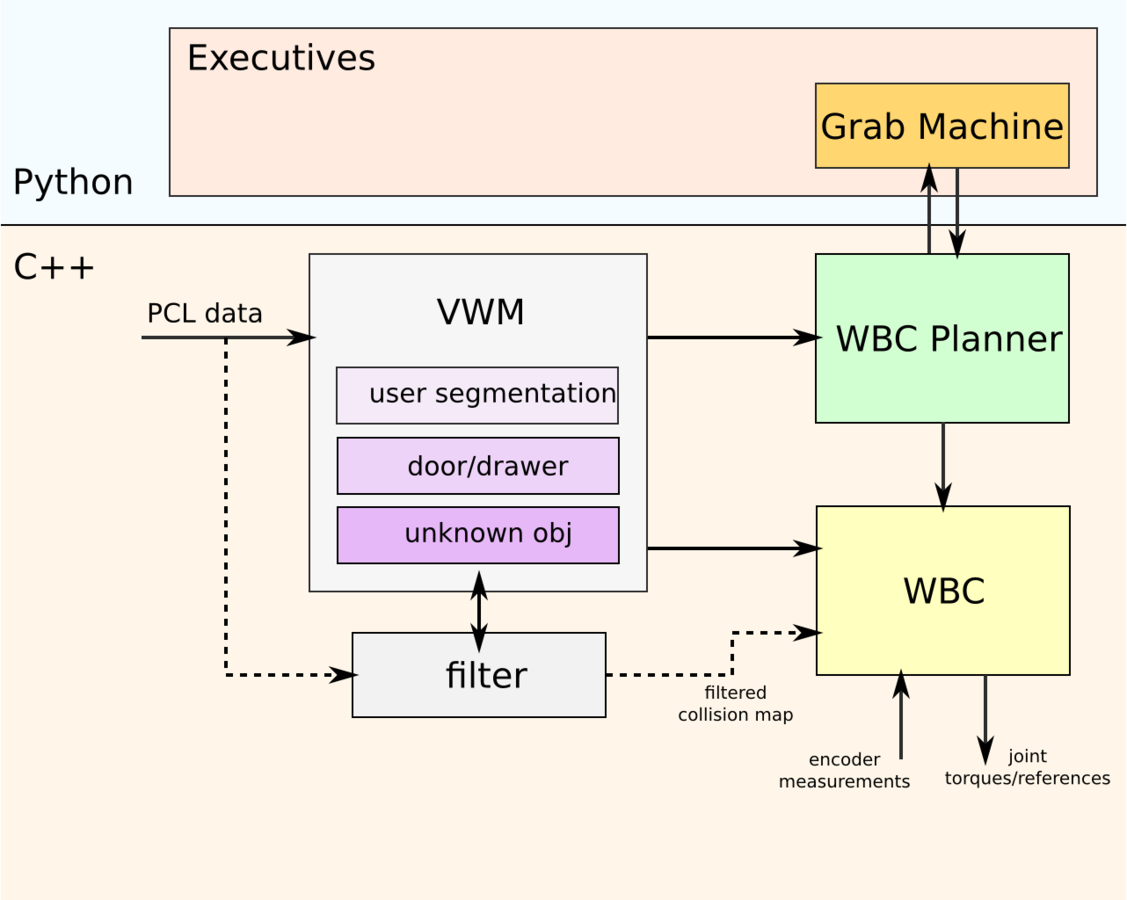
VWM models
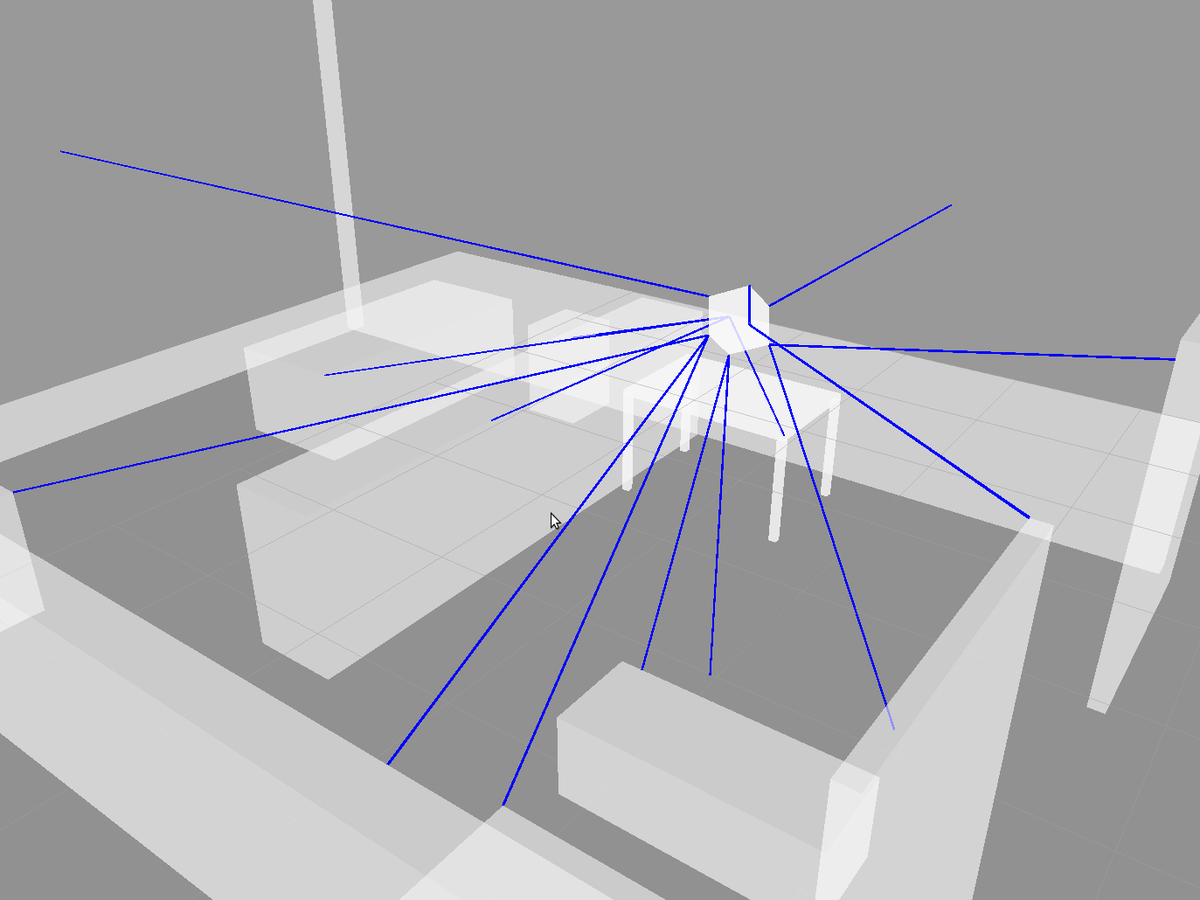
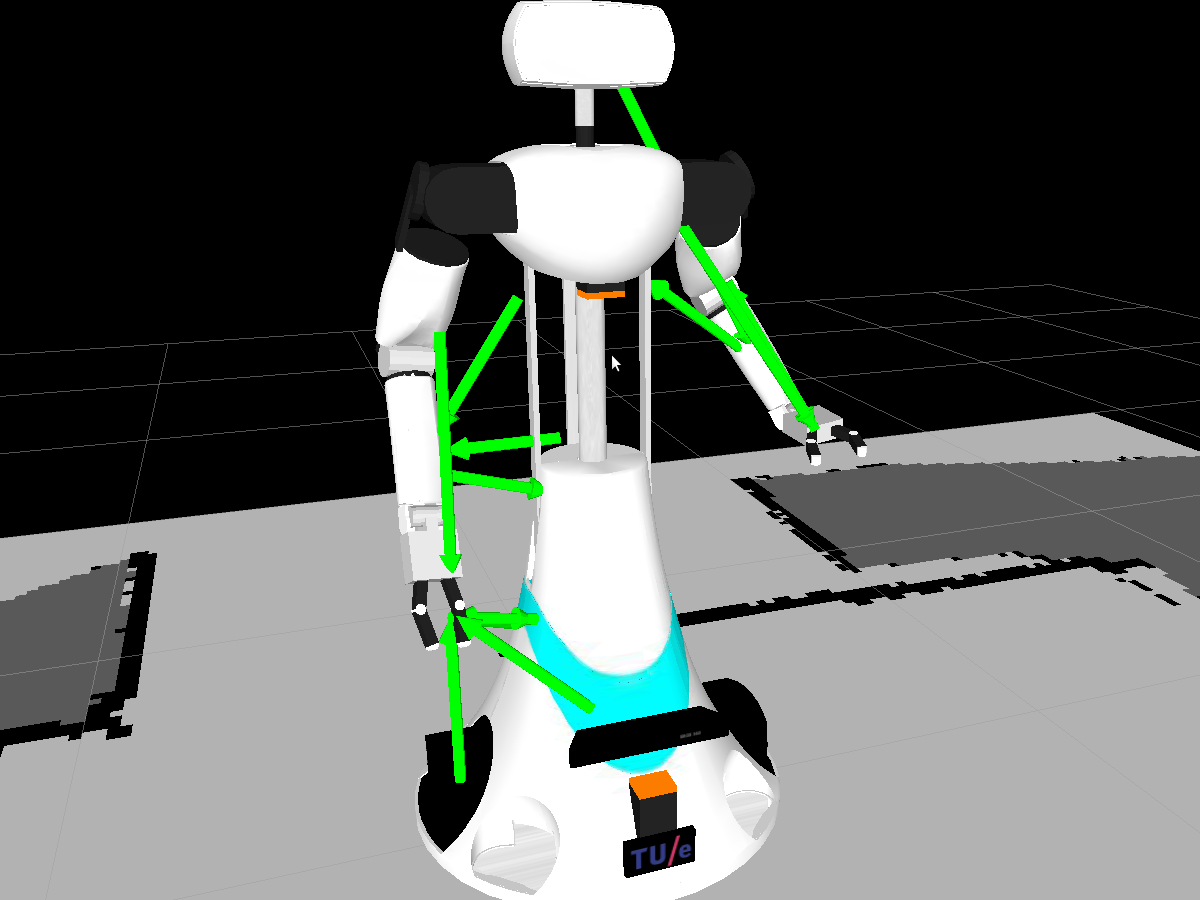
Bullet closest distance
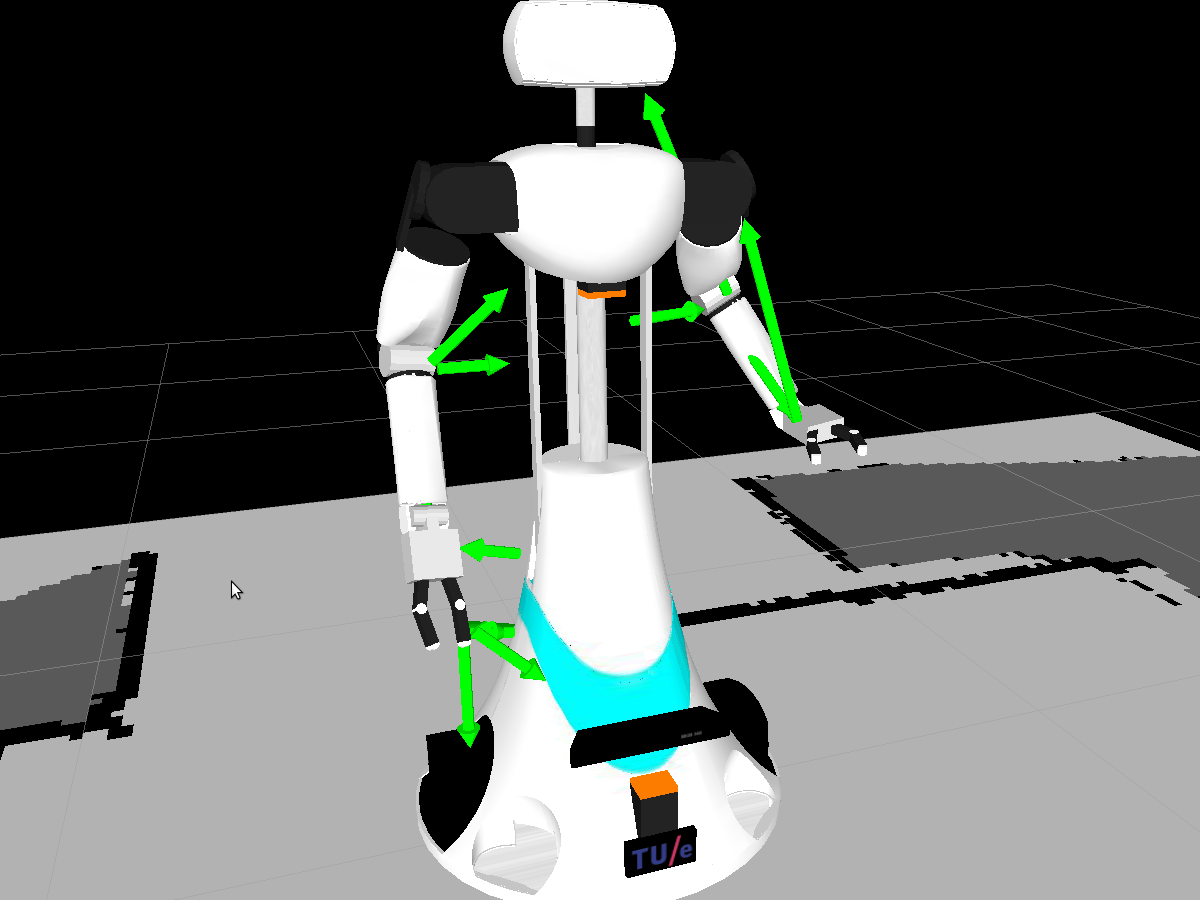
FCL closest distance
Planning
- collision map (1 week)
- planner integration (2 weeks)
- door/drawer plugin (1 month)
- improve grab machine (2 weeks)
- testing on the robot (1 month)
- writing report (1.5 month)
report is finished at the end of July
Questions
- is this enough contribution?
- is this feasible?
Idea's for contribution
- take unknown space into account with arm planning
- smooth forces from collision avoidance
Presentation meeting #3
By rayman