
Lecture 8: Convolutional Neural Networks
Shen Shen
October 25, 2024
Intro to Machine Learning
Outline
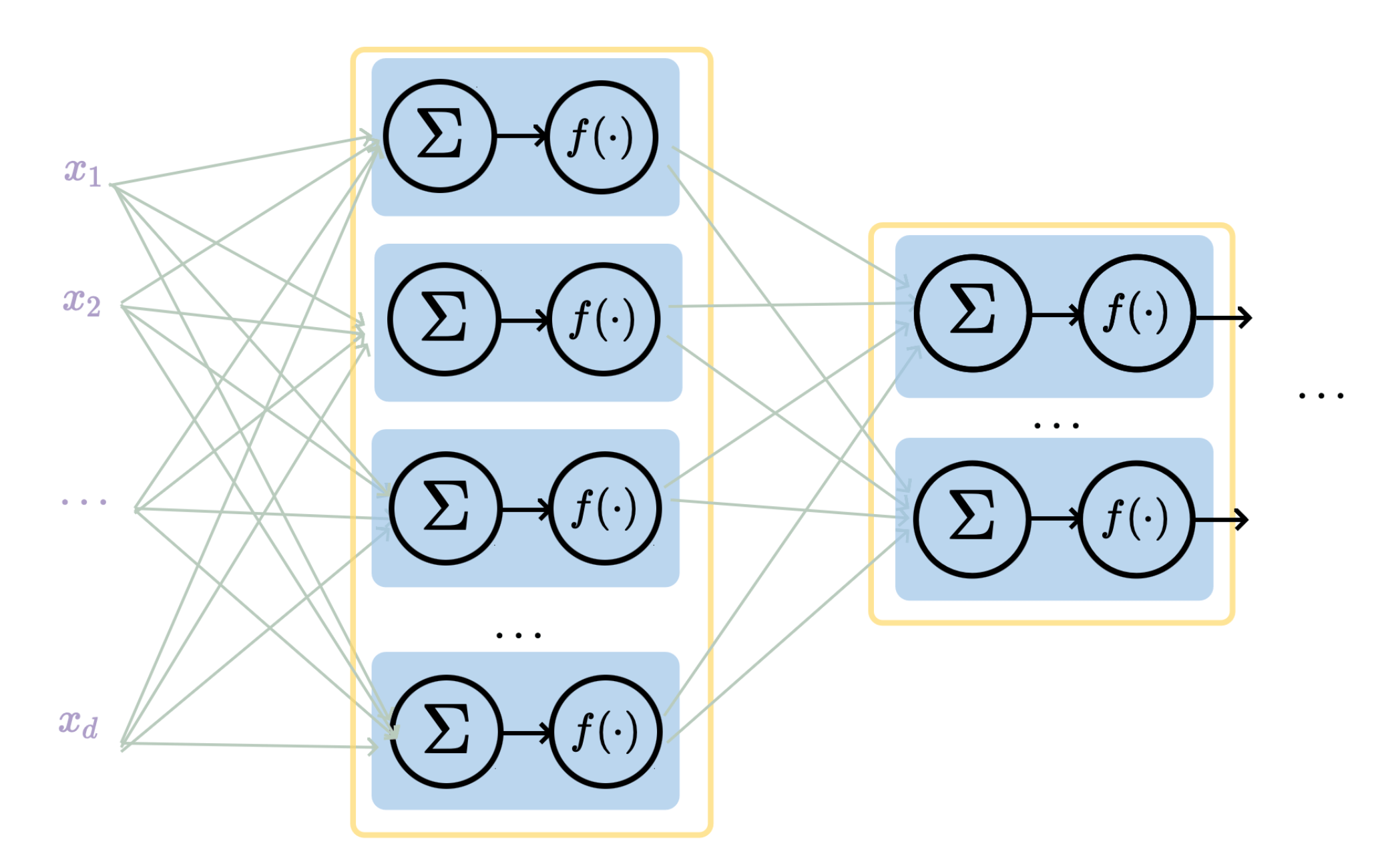
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
- Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
\dots
layer
linear combo
activations
Recap:
\dots
\dots
layer
\dots
x_1
x_2
x_d
input
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
neuron
learnable weights
hidden
output
convolutional neural networks
-
Why do we need a special network for images?
-
Why is CNN (the) special network for images?
9
Why do we need a special net for images?
[video edited from 3b1b]
[video edited from 3b1b]
[video edited from 3b1b]
Q: Why do we need a specialized network?
Use the same small 2 hidden-layer network, need to learn ~3M parameters
For higher-resolution images (e.g. 1024-1024 already leads to 1-million dimensional as input), or more complex tasks, the number of parameters can just grow very fast.
A: fully-connected nets don't scale well for vision tasks
426-by-426 grayscale image
Underfitting
Appropriate model
Overfitting
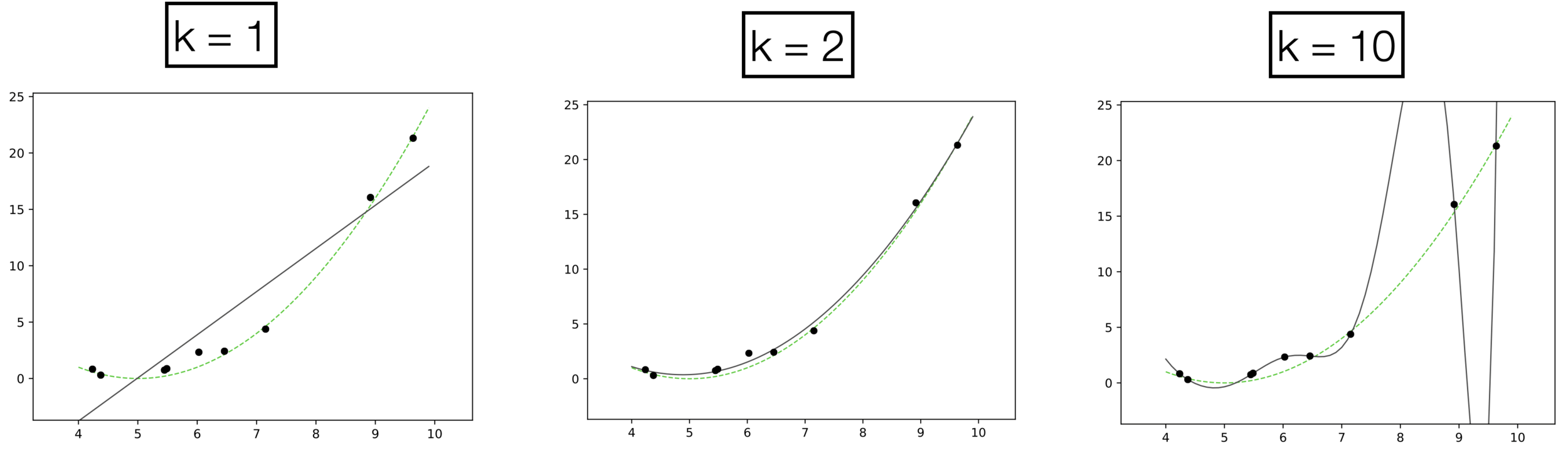
k=1
k=2
k=10
Recall, more powerful models also tend to overfitting
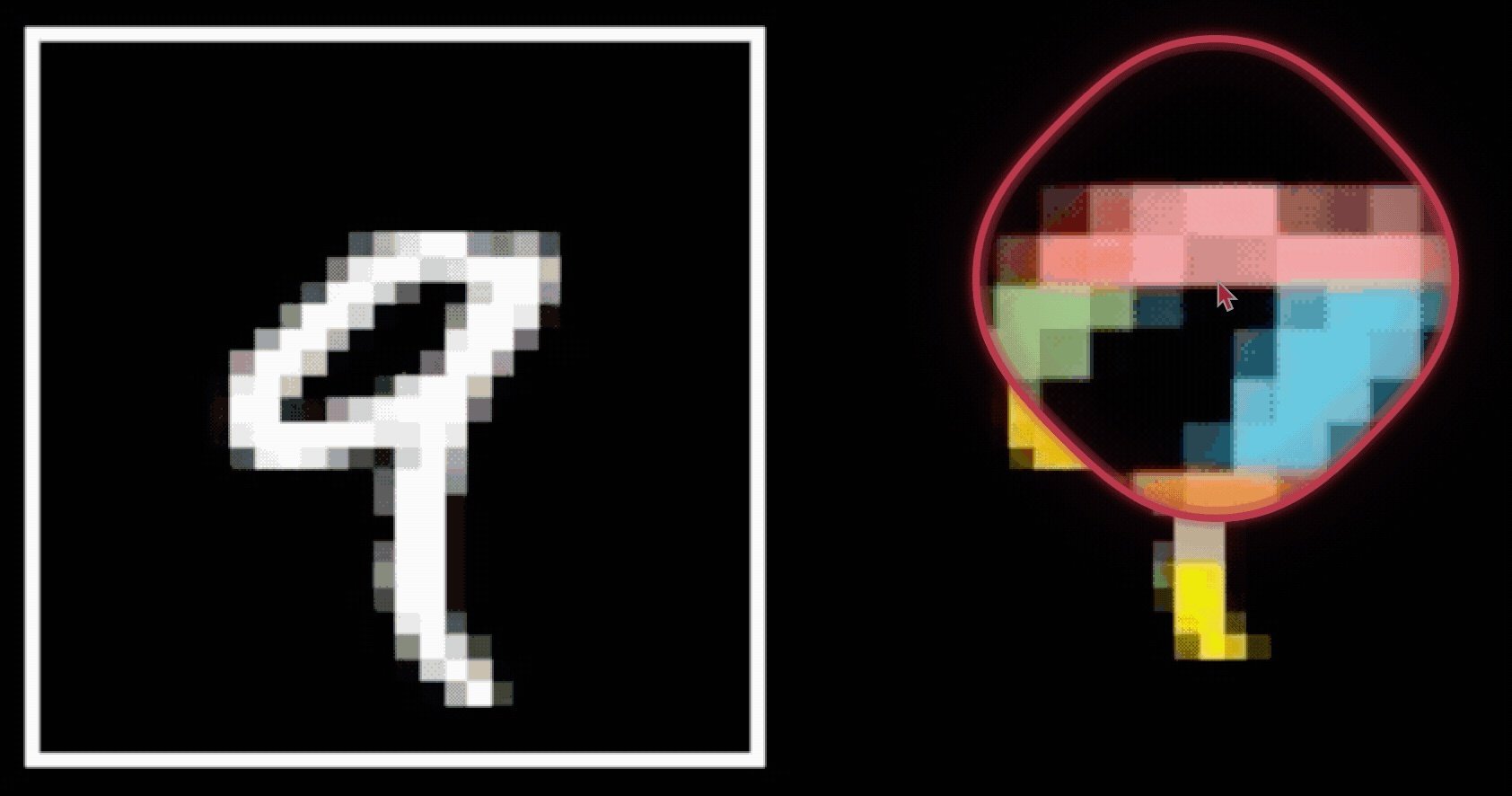
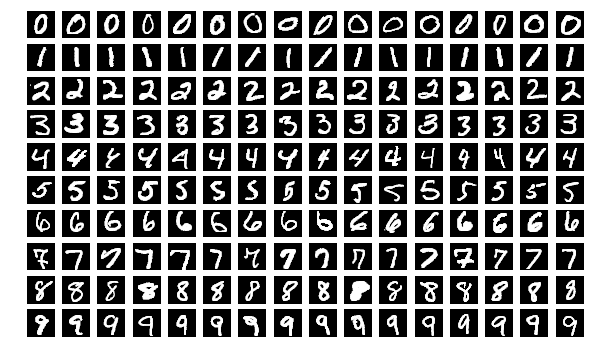
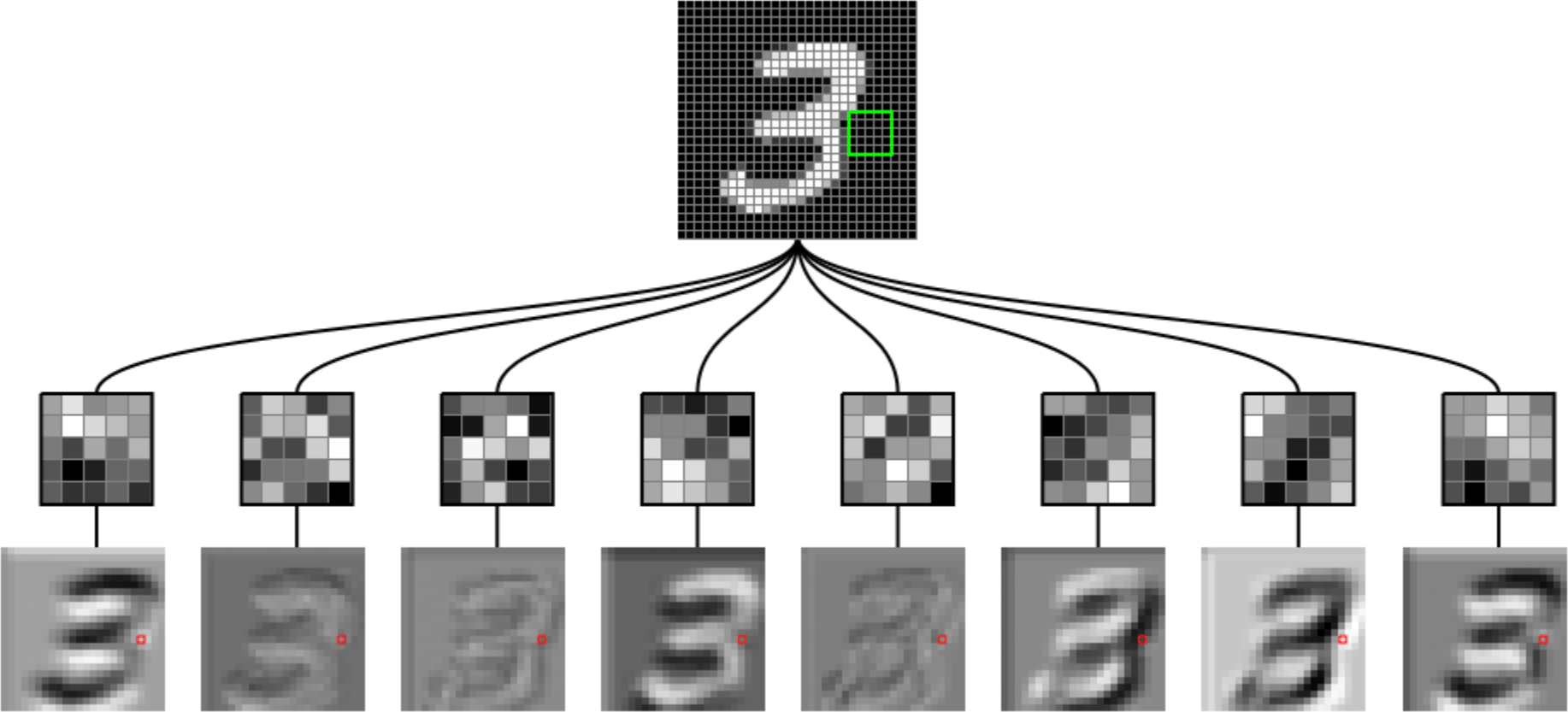
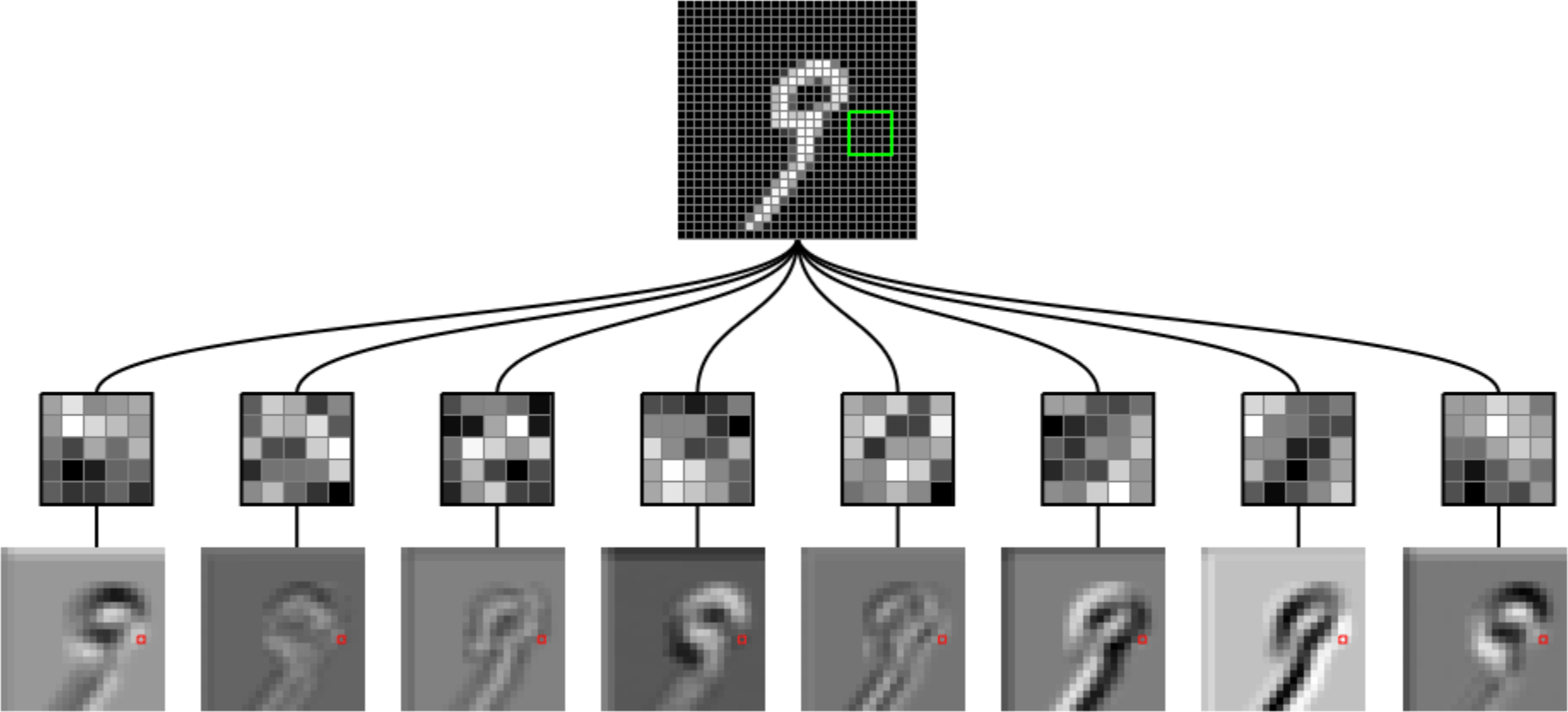
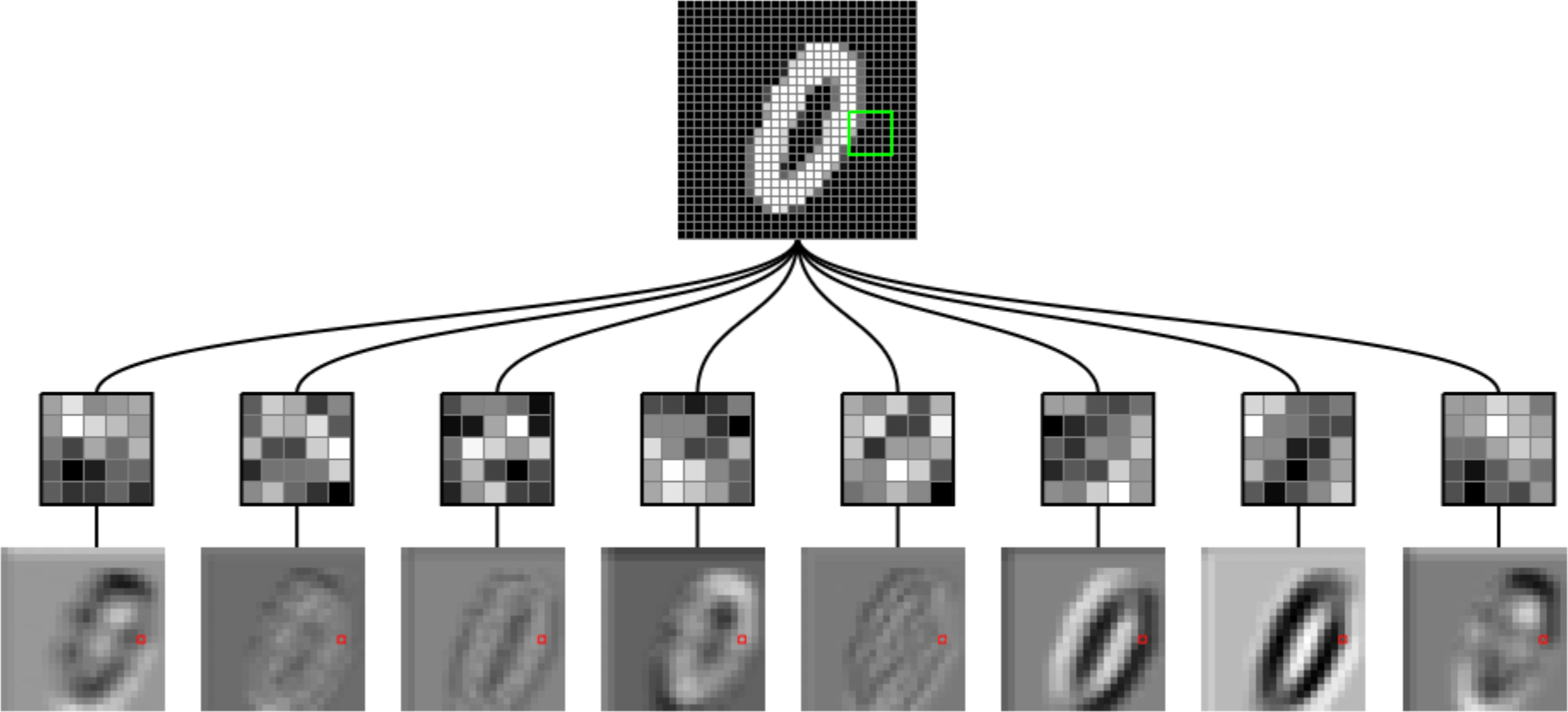
Why do we think
is 9?
Why do we think any of
is 9?

[video edited from 3b1b]
[video edited from 3b1b]
[video edited from 3b1b]


- Visual hierarchy
layering is compatible with hierarchical structure
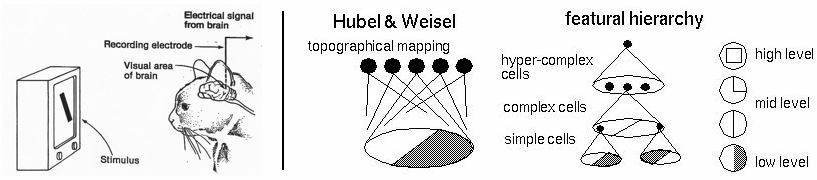
- Visual hierarchy
- Spatial locality
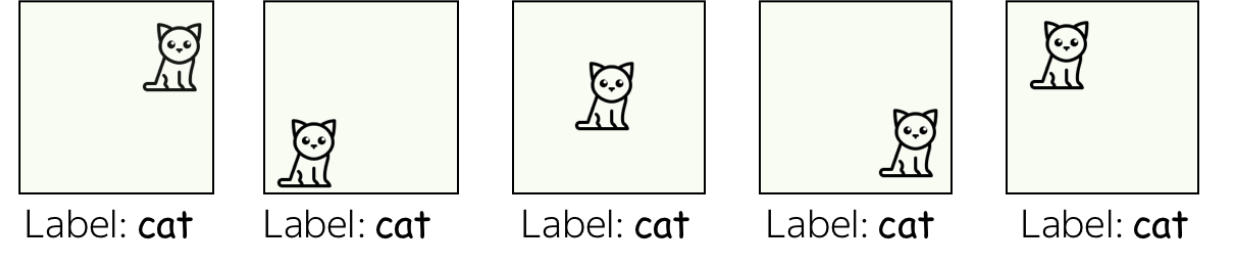
- Translational invariance
CNN cleverly exploits
to handle images efficiently and sensibly.
via
- layering (with nonlinear activations)
- convolution
- pooling
- Visual hierarchy
- Spatial locality
- Translational invariance
Outline
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
- Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
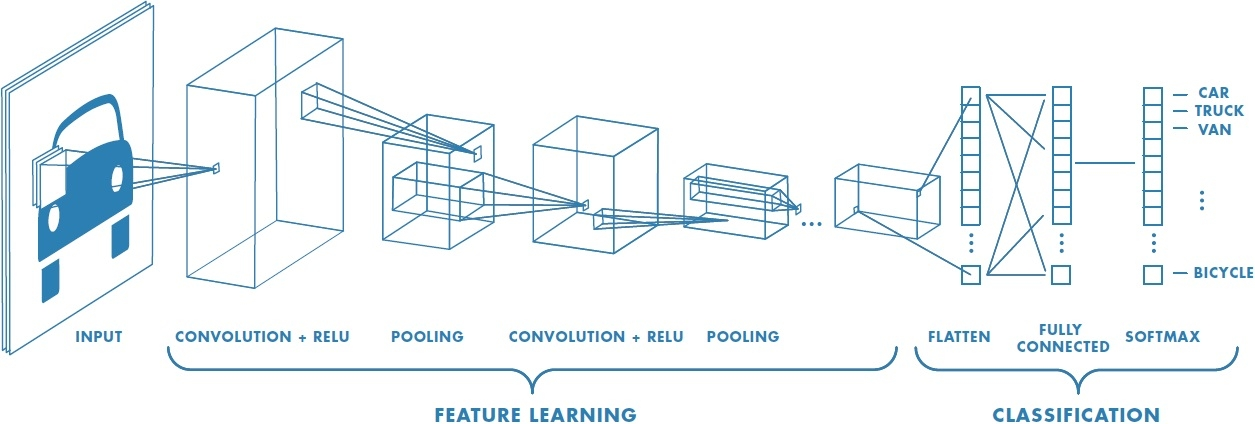
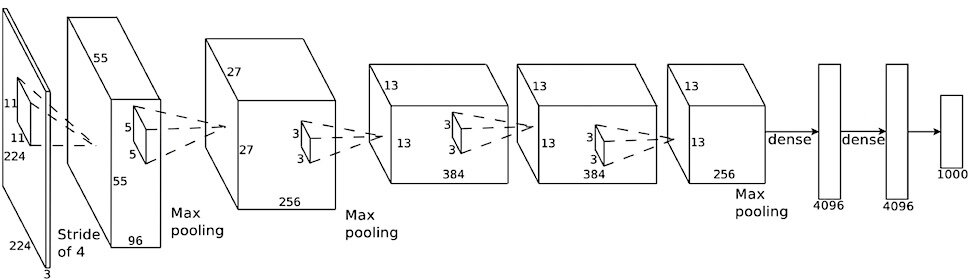
typical CNN structure for image classification
Outline
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
-
Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
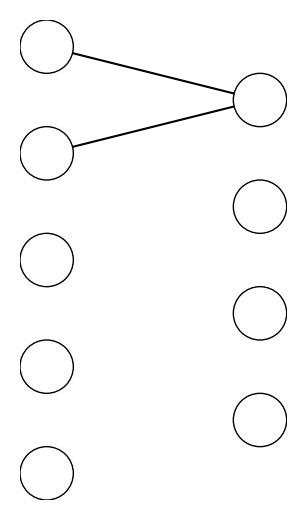
Convolutional layer might sound foreign, but it's very similar to fully connected layer

convolution with filters do these things:
| Layer | ||
|---|---|---|
| fully-connected | ||
| convolutional |
filter (kernels) weights
convolution
dot-product
Forward pass, do
Backward pass, learn
neuron weights
0
1
0
1
1
-1
1
input
filter
convolved output
1
(0*-1)+(1*1)=1
example: 1-dimensional convolution
0
1
0
1
1
-1
1
input
filter
convolved output
1
(1*-1)+(0*1)=-1
-1
example: 1-dimensional convolution
0
1
0
1
1
-1
1
input
filter
convolved output
1
1
example: 1-dimensional convolution
(0*-1)+(1*1)=1
-1
0
1
0
1
1
-1
1
input
filter
convolved output
1
1
-1
(1*-1)+(1*1)=0
0
example: 1-dimensional convolution
0
1
-1
1
1
-1
1
input
filter
convolved output
template matching
1
-2
2
0
convolution interpretation:
-1
1
-1
1
-1
1
-1
1
convolution interpretation:
0
1
-1
1
1
-1
1
input
filter
convolved output
1
-2
2
0
"look" locally
0
1
-1
1
1
-1
1
convolve with
=
dot product with
1
-2
2
0
1
0
0
0
0
-1
0
0
0
0
0
1
0
0
0
1
-1
0
1
-1
-1
convolution interpretation:
parameter sharing

0
1
0
1
1
convolve with
dot product with
0
1
0
1
1
?
?
1
I_{5\times5}
| 0 | 1 |
convolution interpretation:
input
filter
convolved output
| 0 | 1 | 0 | 1 | 0 |
| 1 | 0 | 1 | 0 |
translational equivariance
hyperparameters
- Zero-padding input
- Filter size (e.g. we saw these two)
- Stride
(e.g. stride of 2)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
1
1
1
1
0
0
1
1
0
0
1
1
1
1
0
0
0
0
0
0
0
0
0
0
1
1
0
0
1
1
1
1
0
0
1
1
0
0
1
1
1
1
0
0
0
0
0
0
0
0
1
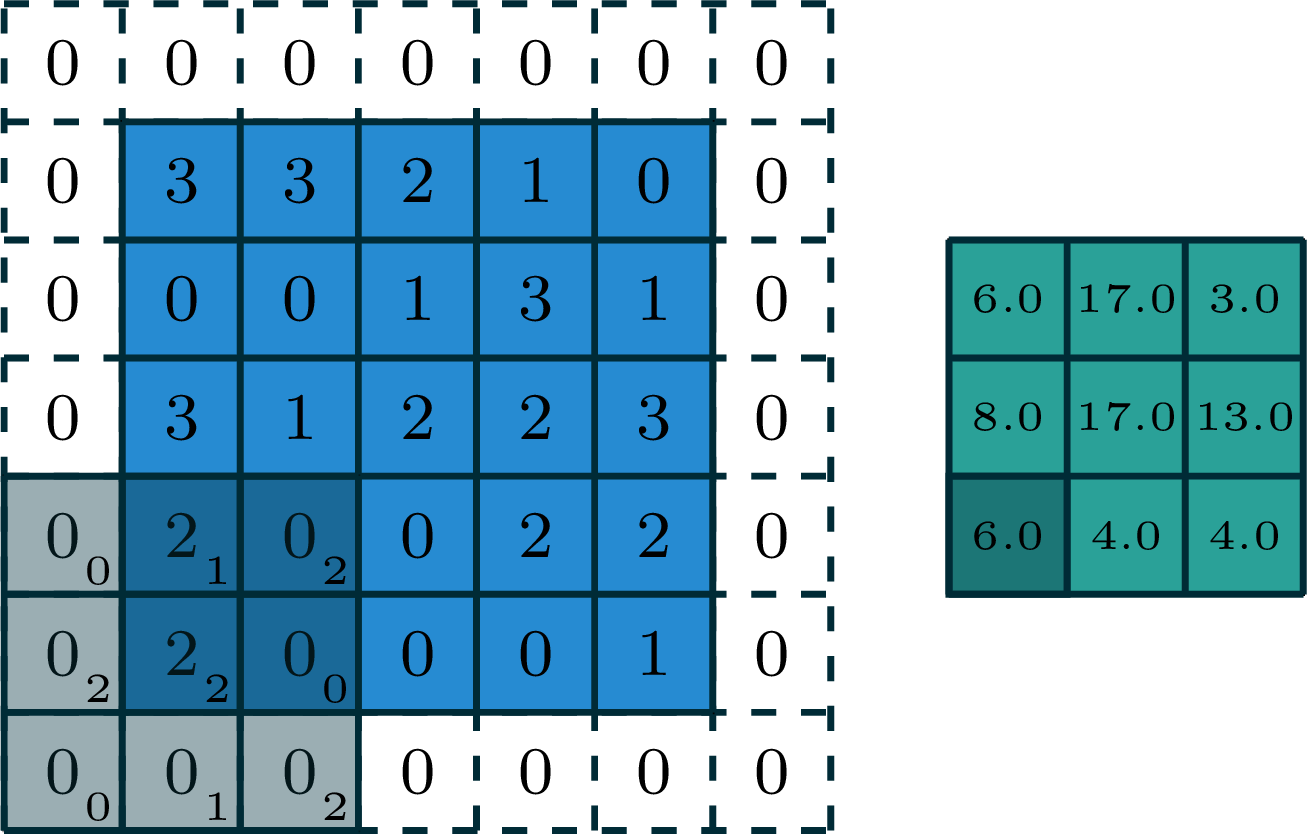
these weights are what CNN learn eventually
-1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
1
1
1
1
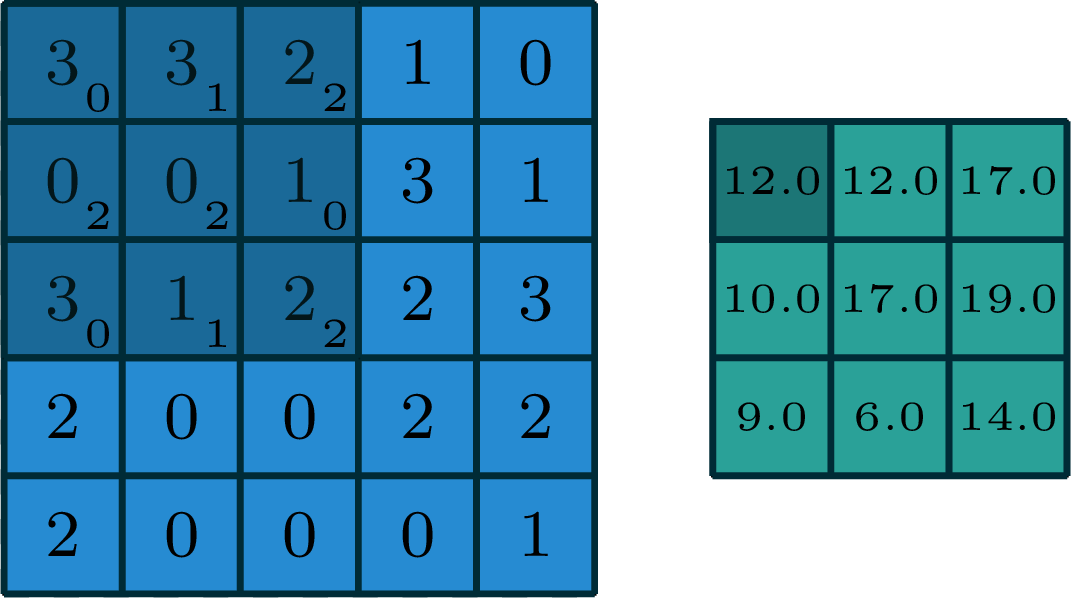
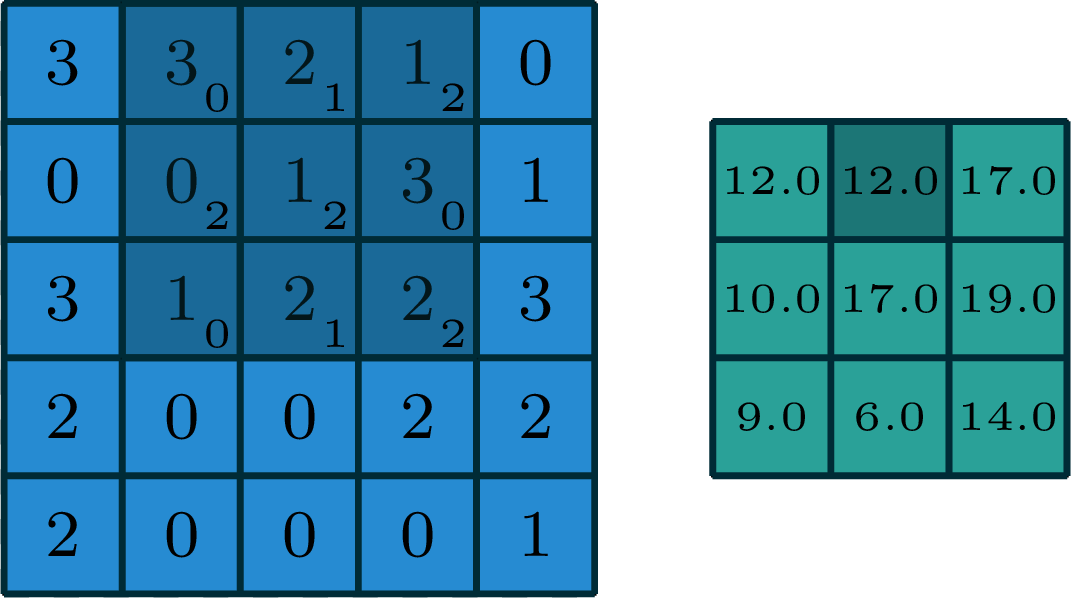
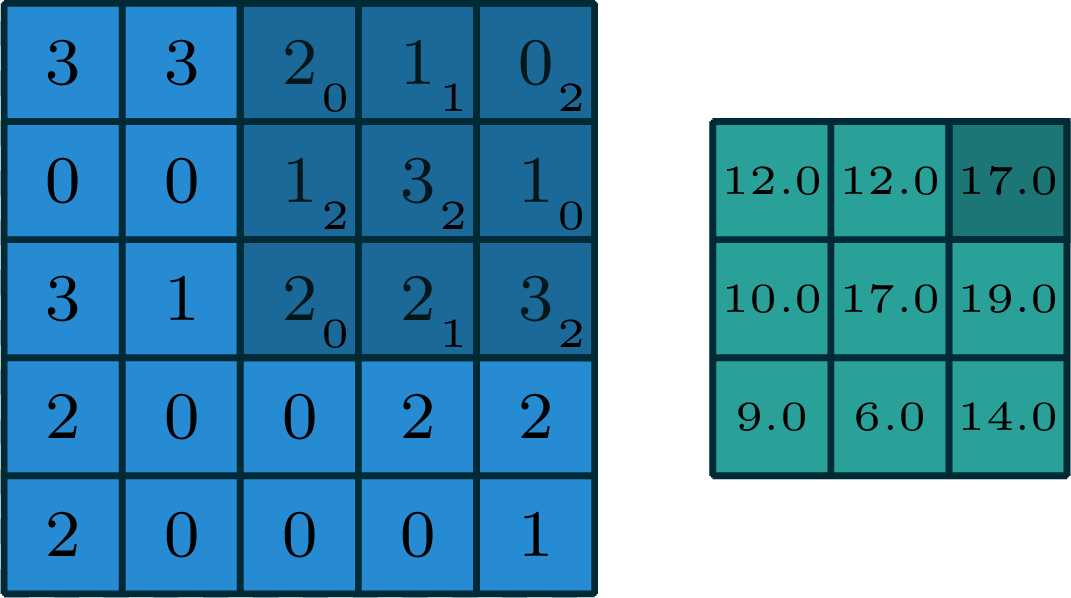
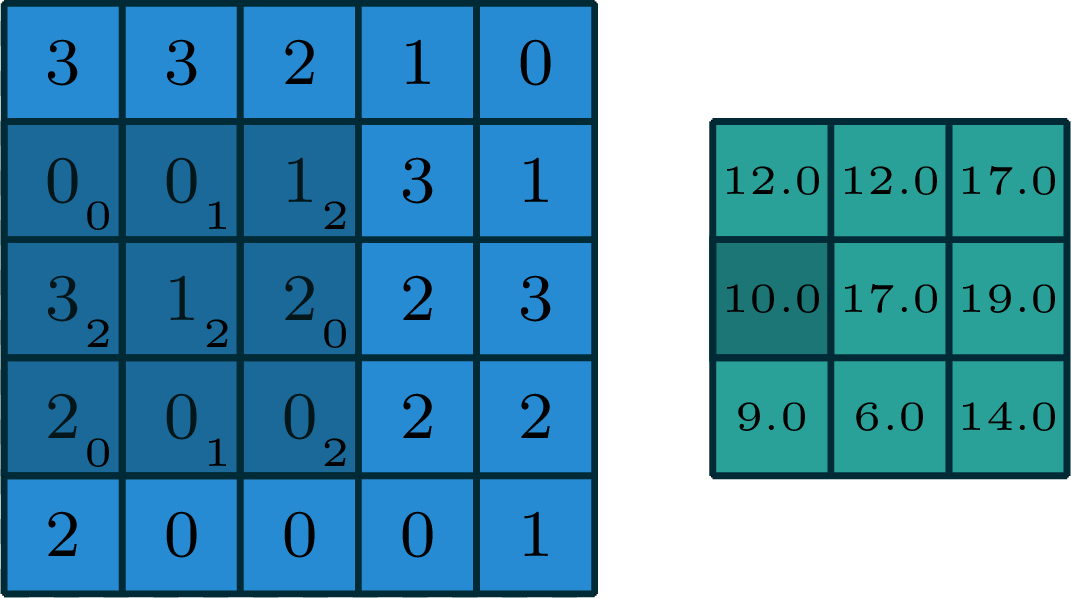
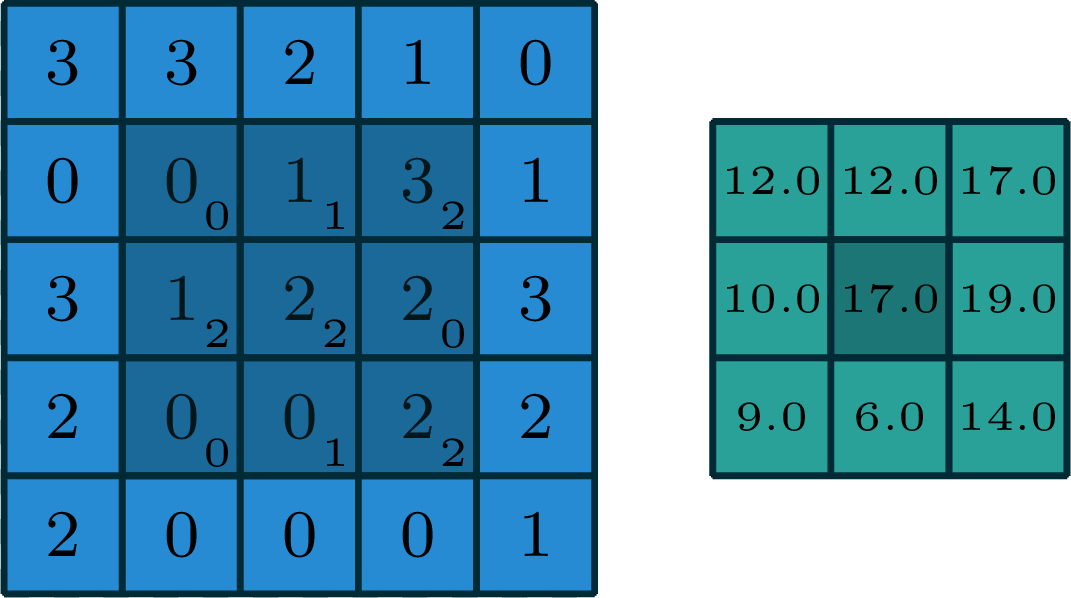
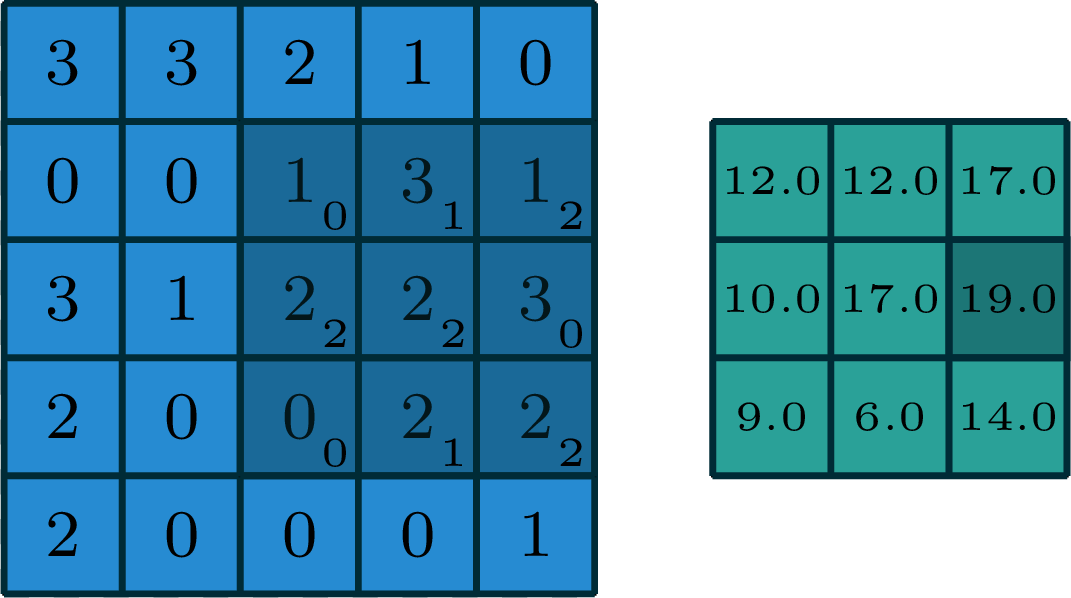
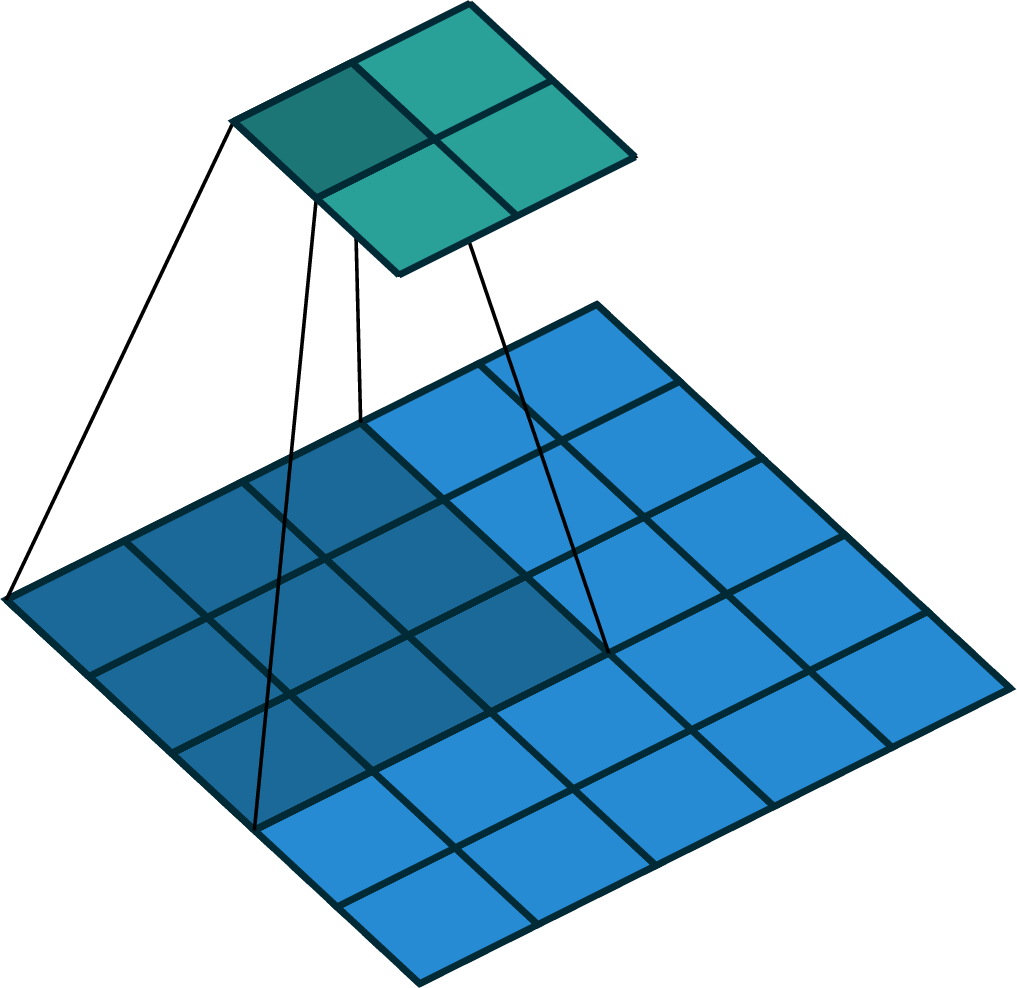
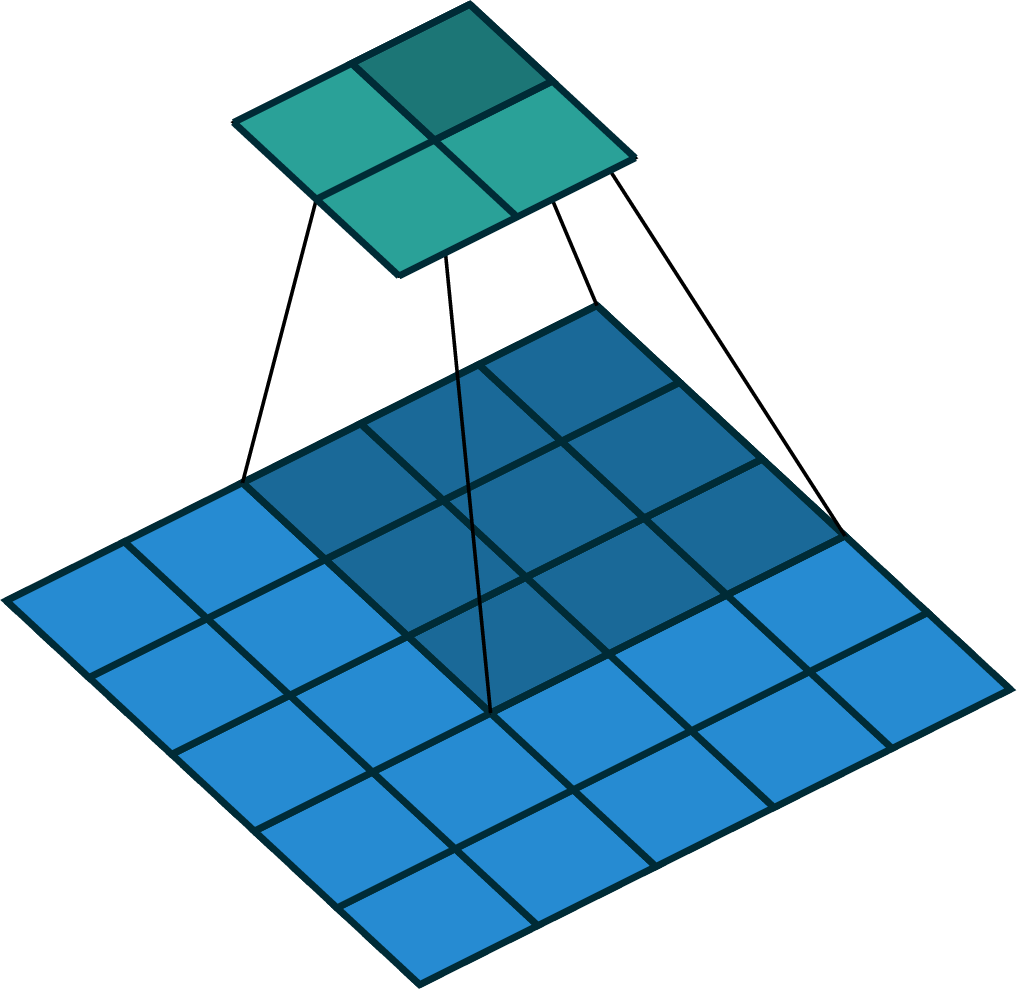
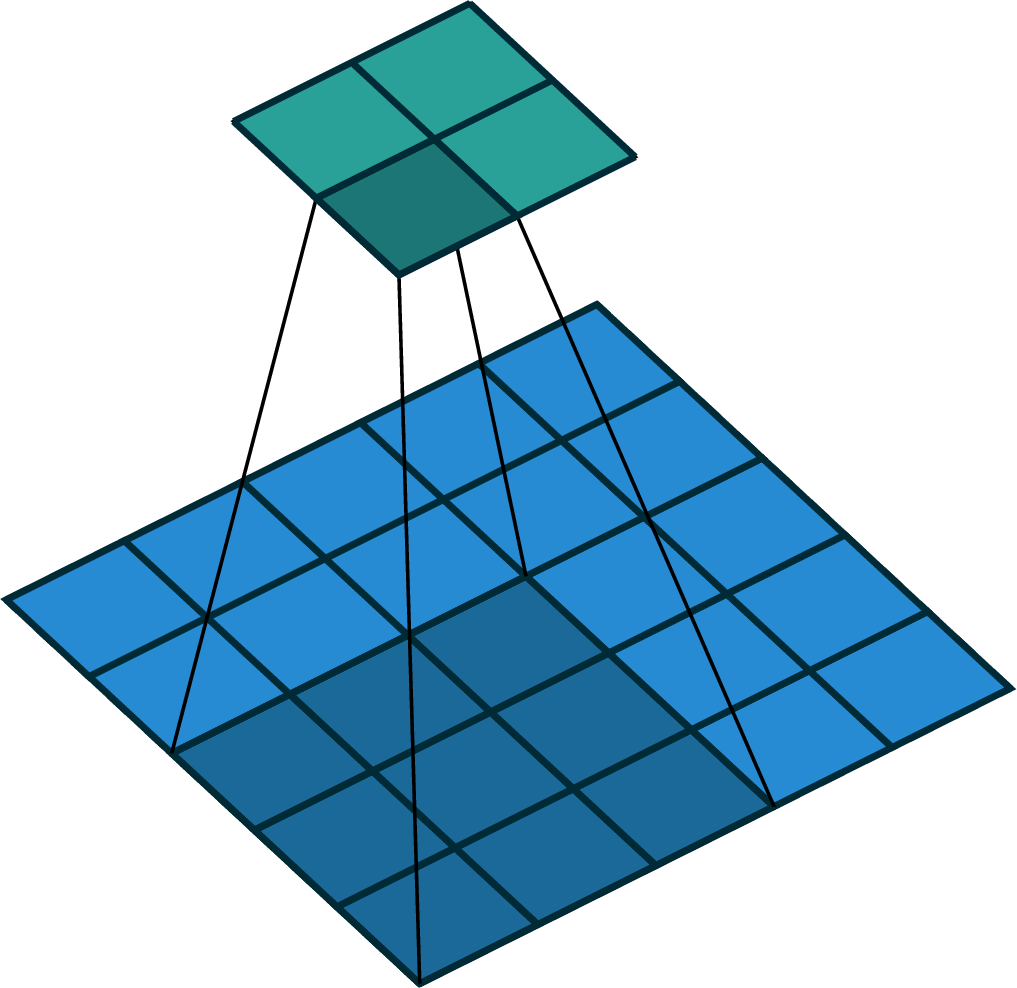
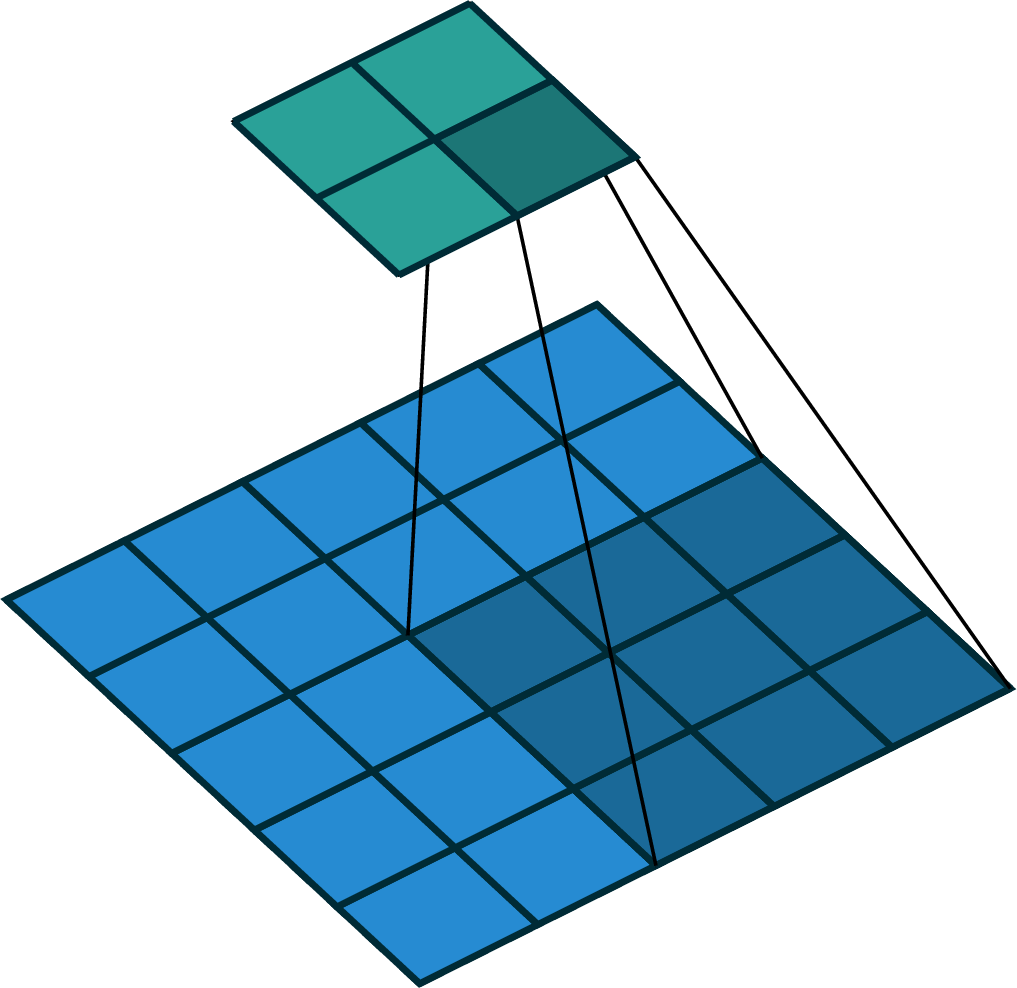
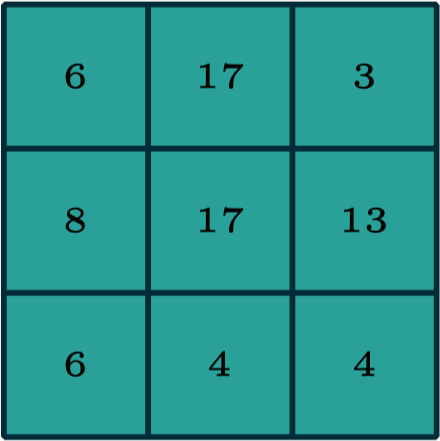
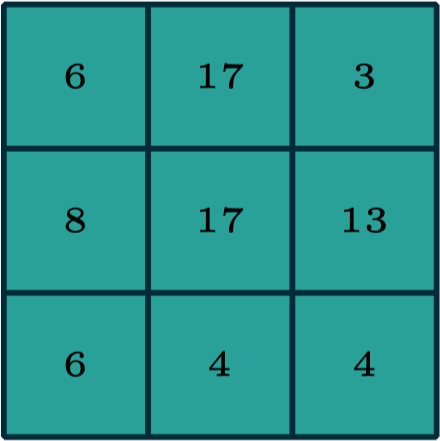
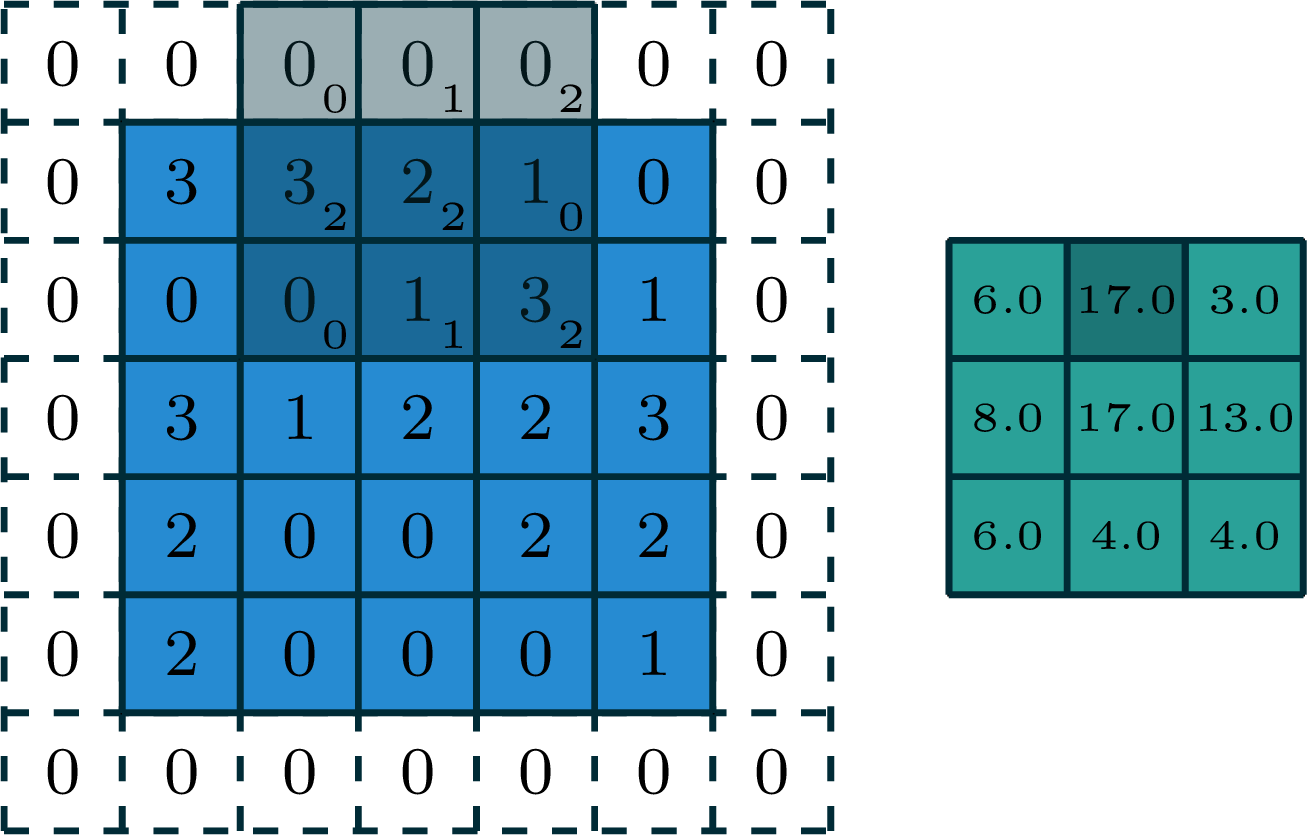
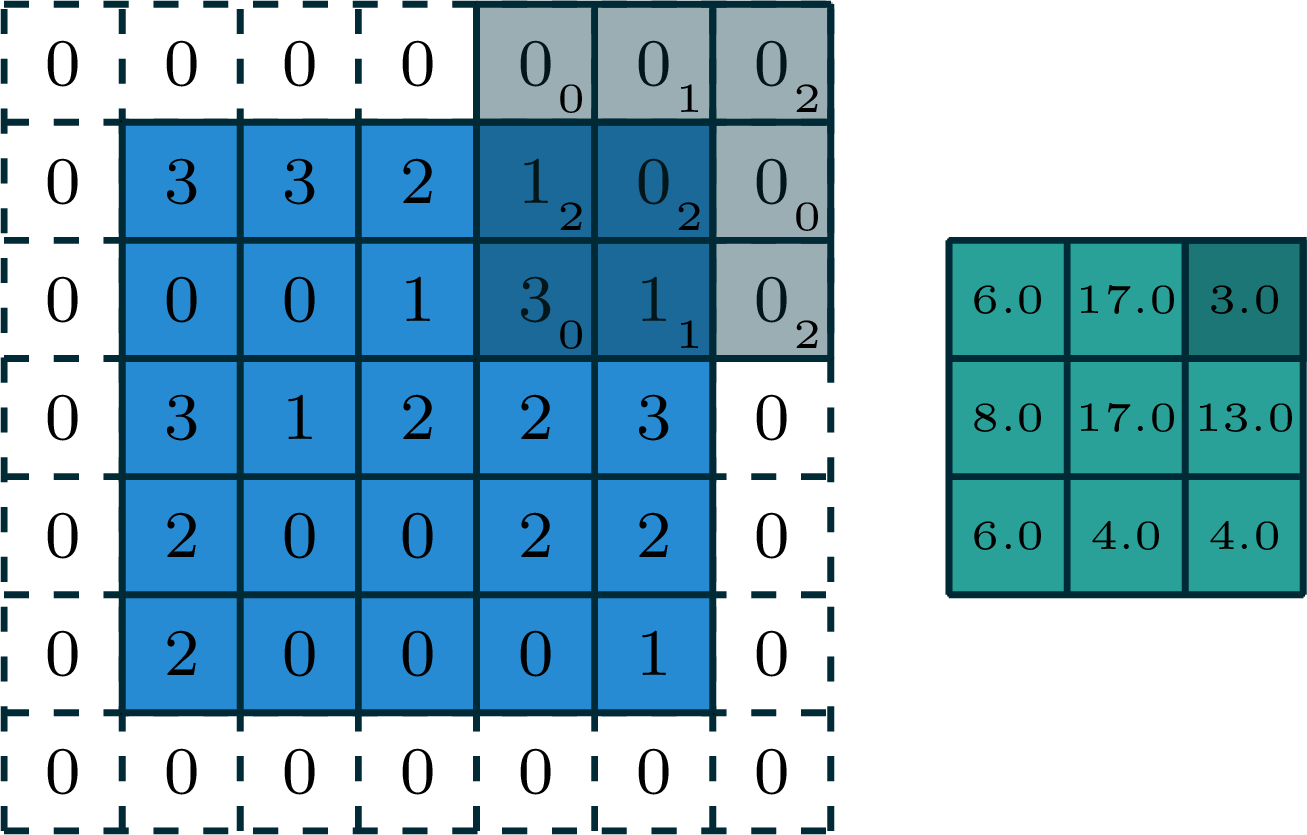
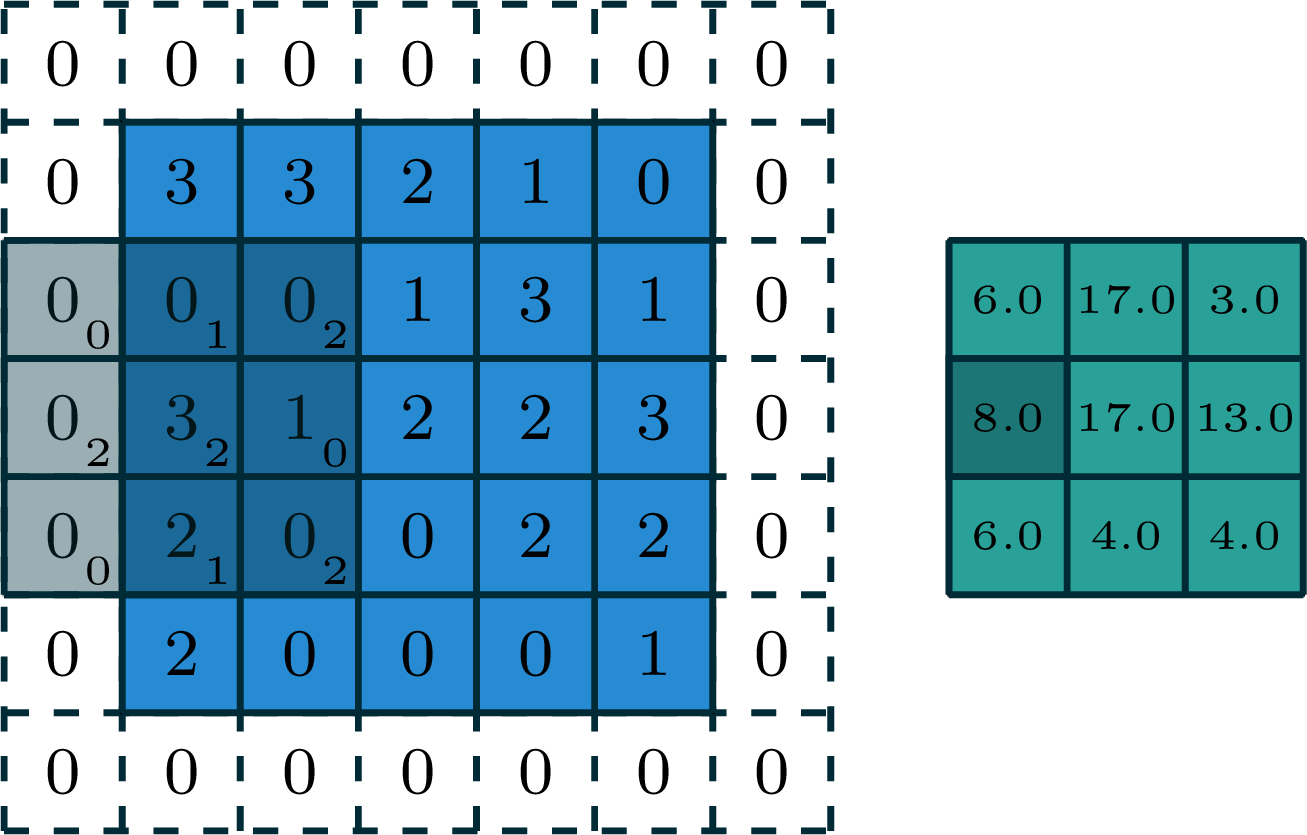
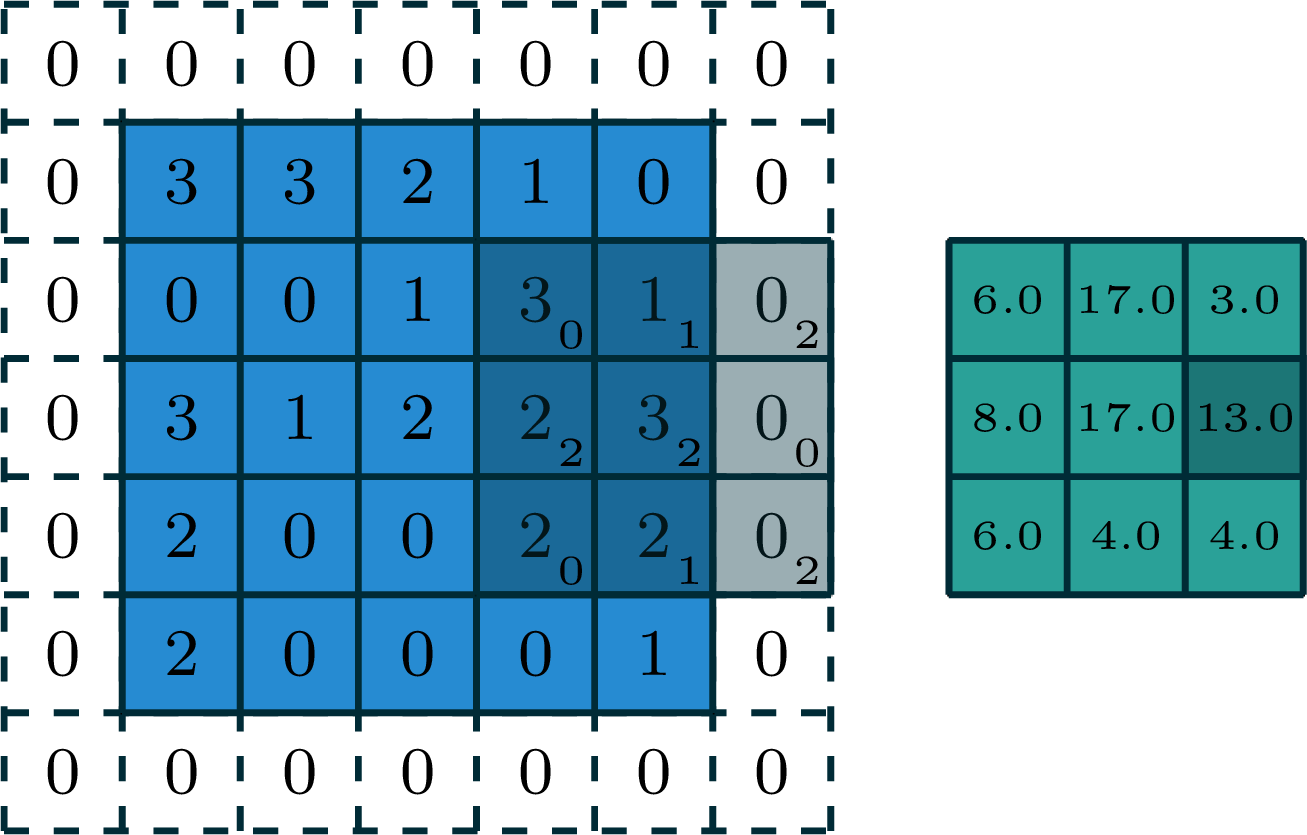
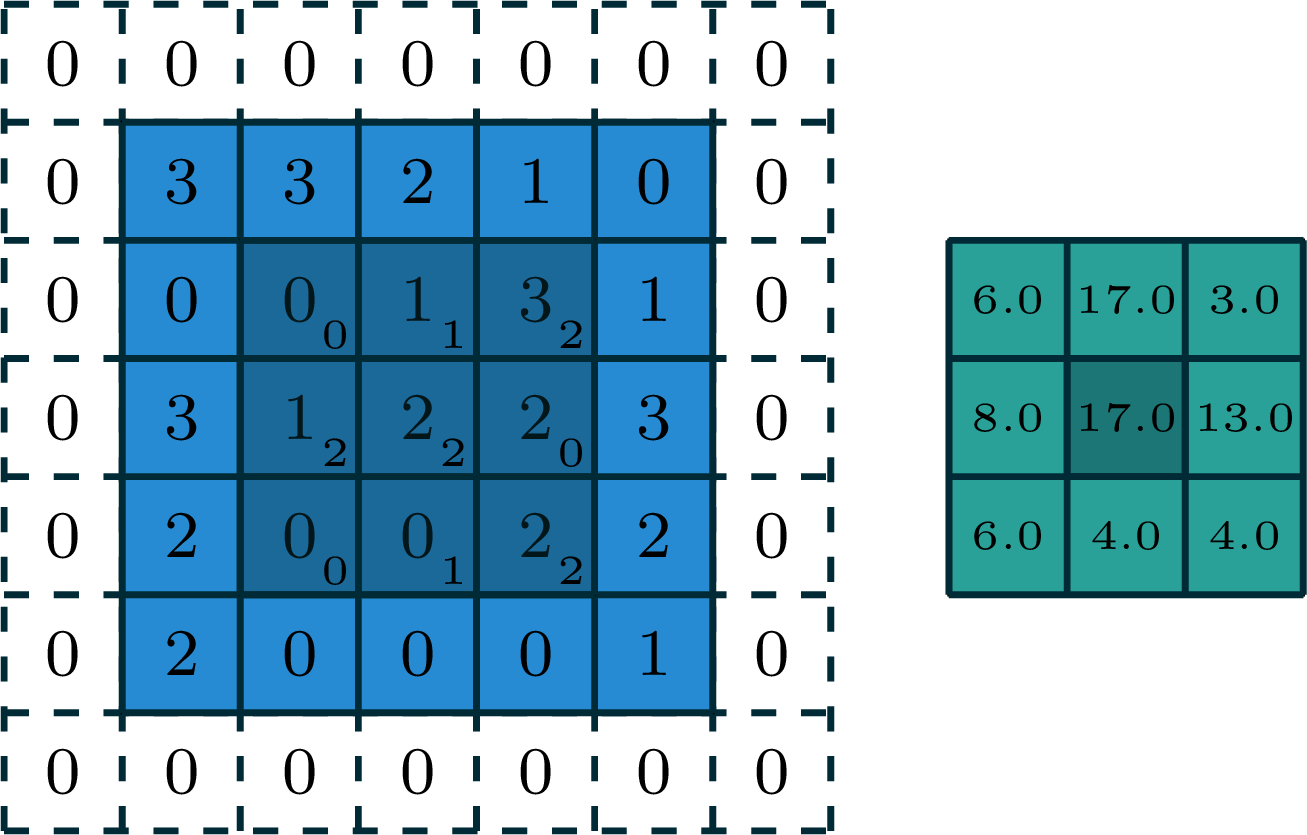
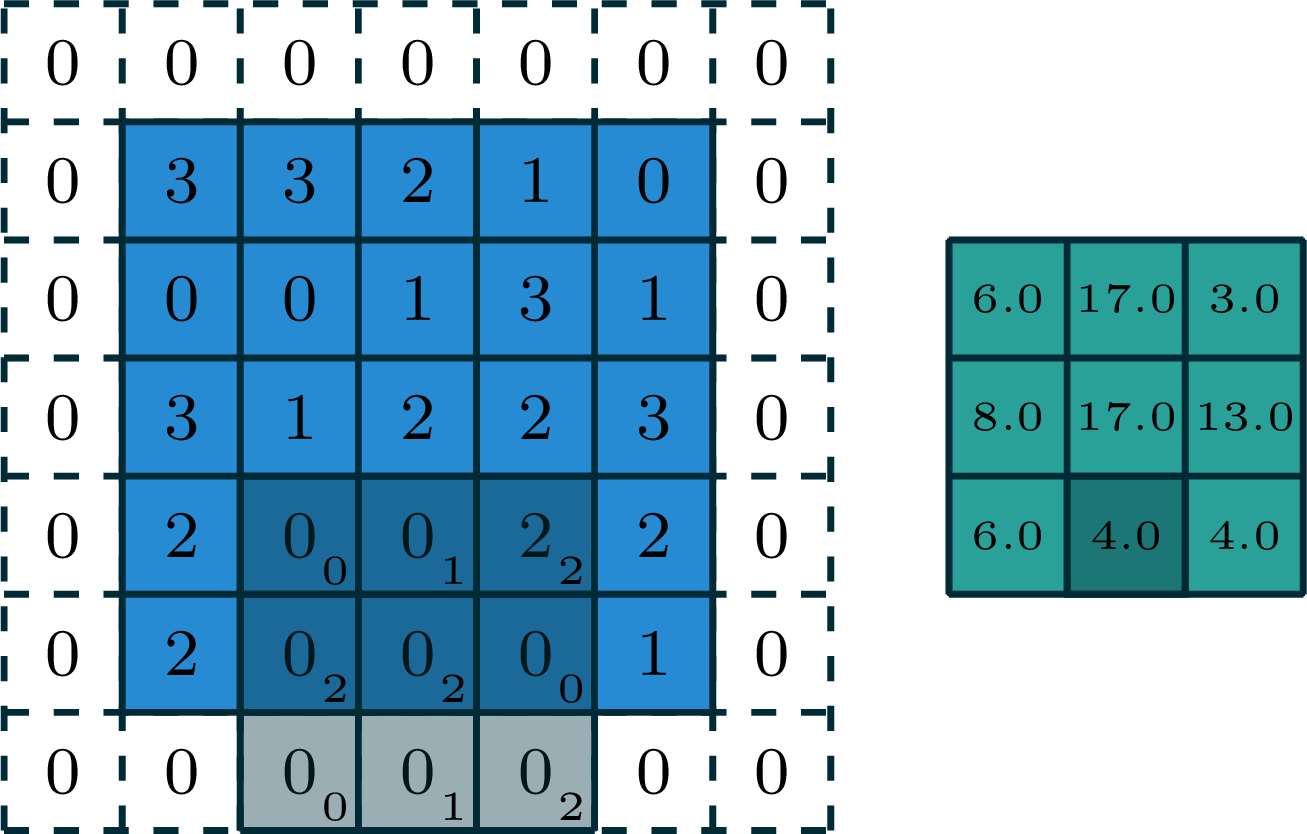
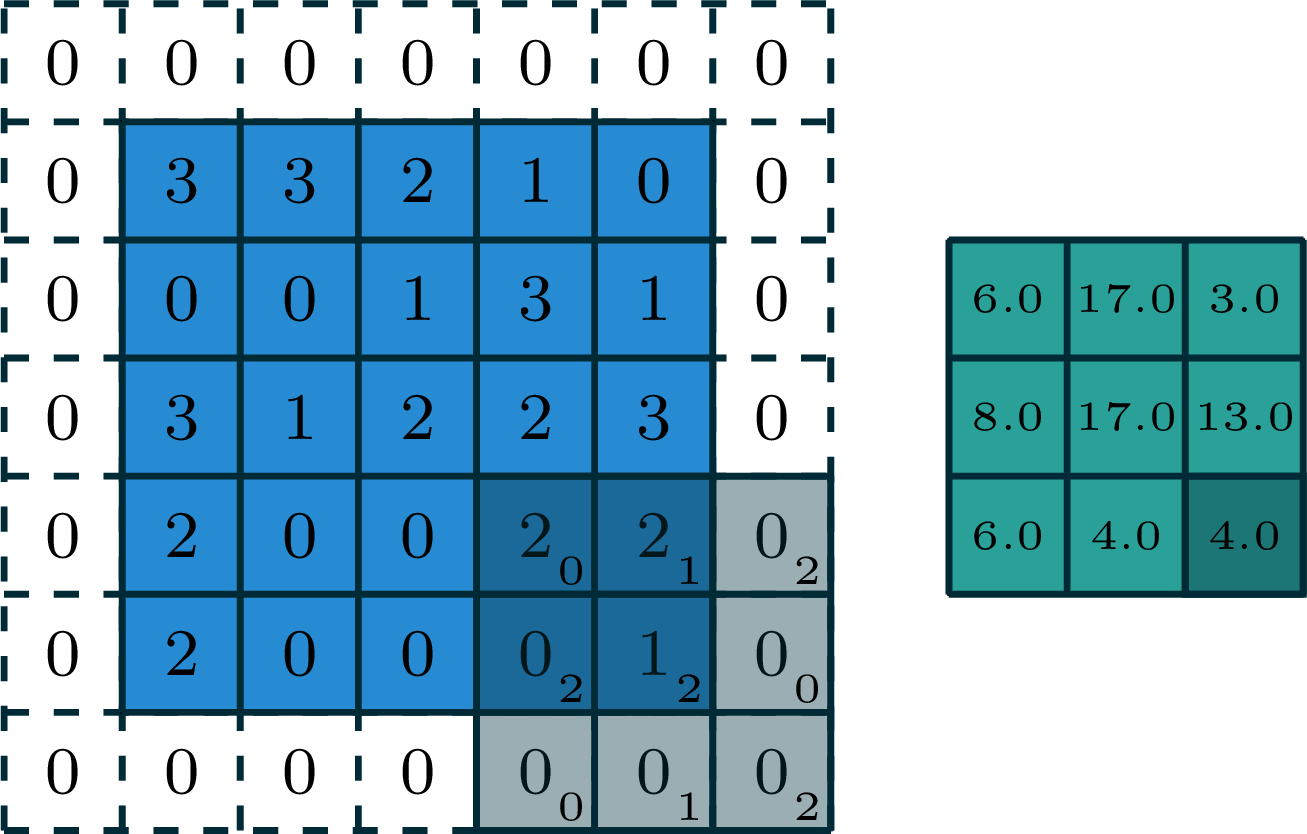
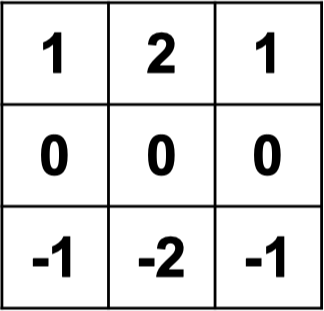
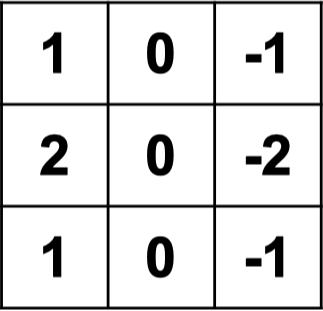
2-dimensional convolution
input
filter
[image edited from vdumoulin]
output
[image edited from vdumoulin]

[image edited from vdumoulin]
stride of 2
input
filter
output
[image edited from vdumoulin]
stride of 2
[image edited from vdumoulin]
stride of 2, with padding of size 1
input
filter
output
[image edited from vdumoulin]
[video credit Lena Voita]
- Looking locally
- Parameter sharing
- Template matching
- Translational equivariance
convolution interpretation:
Outline
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
- Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
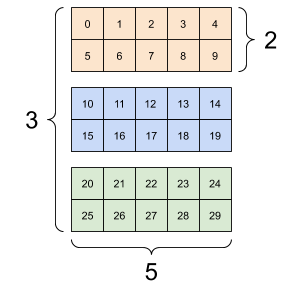
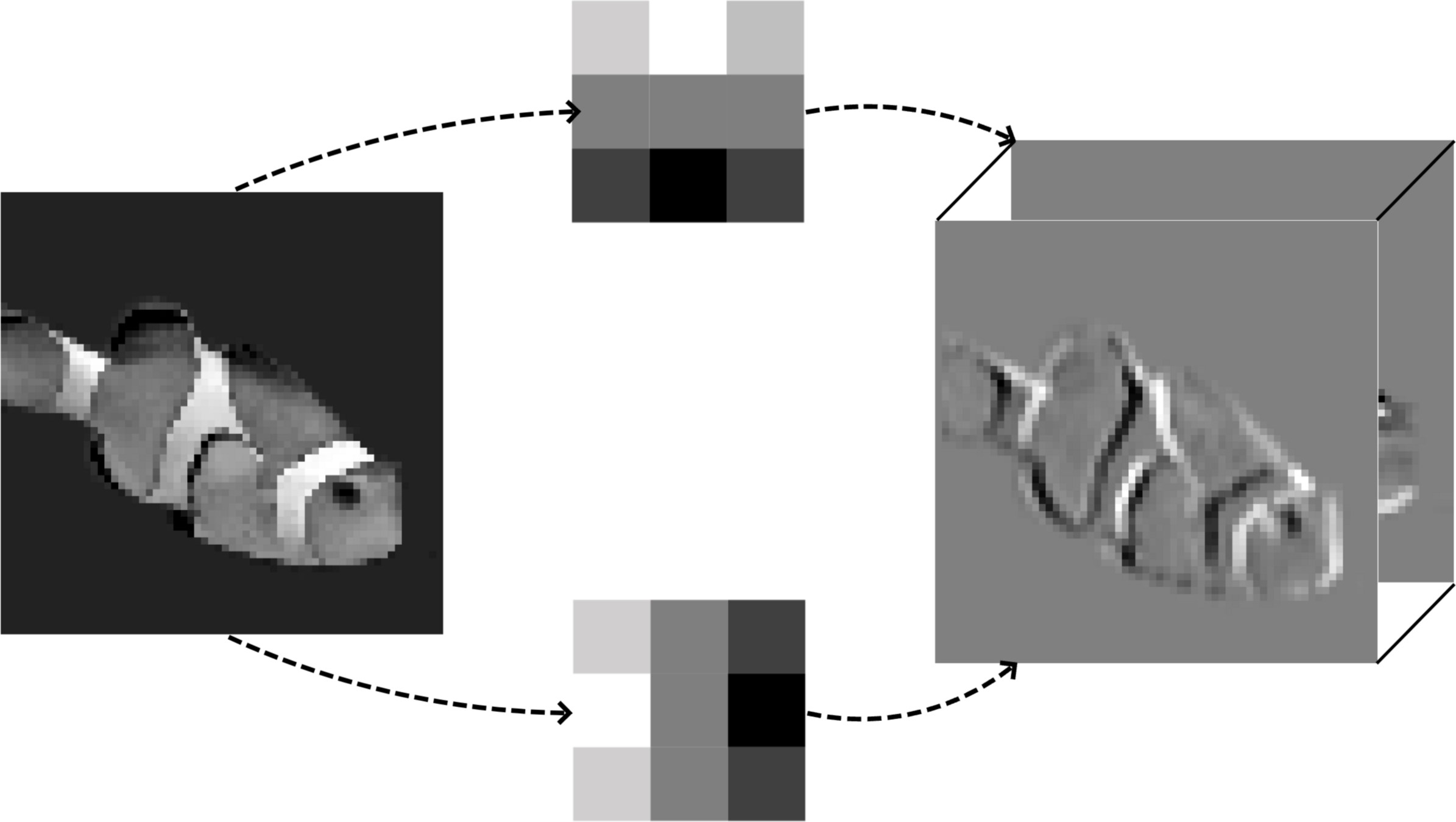
A tender intro to tensor:
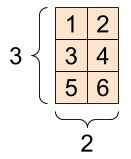
[image credit: tensorflow]


red
green

blue

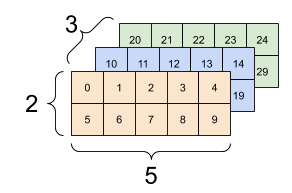
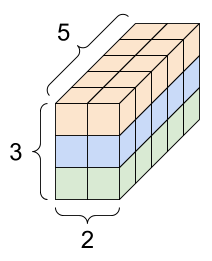
We'd encounter 3d tensor due to:
1. color input
image depth (channels)
image width
image
height
filter 1
filter 2
We'd encounter 3d tensor due to:
2. the use of multiple filters
filter 1
filter 2
image depth (channels)
\dots
We'd encounter 3d tensor due to:
2. the use of multiple filters
2. the use of multiple filters
image depth (channels)
image width
image
height
image depth (channels)
1. color input
We'd encounter 3d tensor due to
image width
image
height
- 2d convolution, 2d output
image depth (channels)
\Bigg\{
d
| ... | ||||
| ... | ||||
| ... | ||||
| ... |
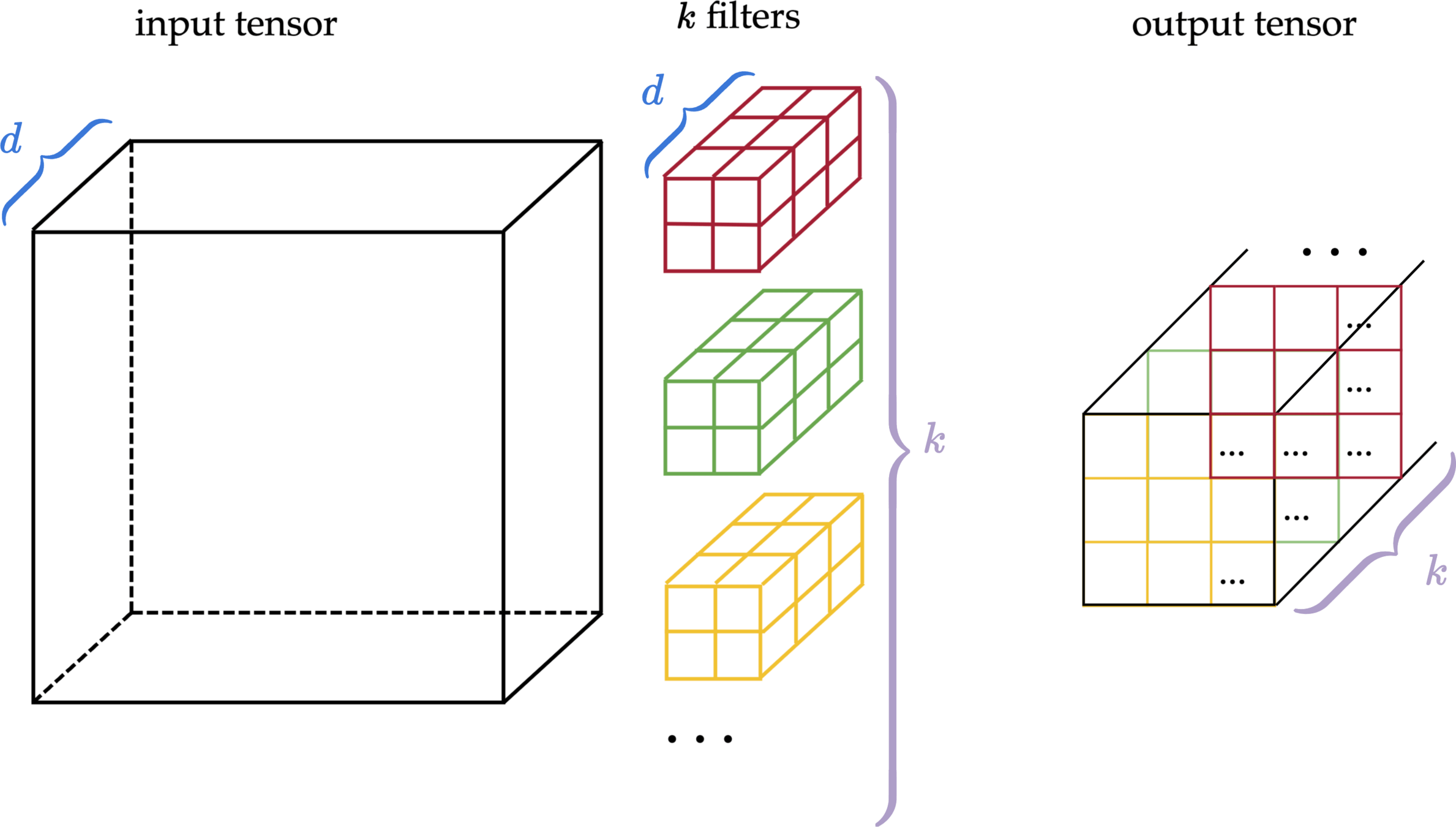
- 3d tensor input, depth \(d\)
- 3d tensor filter, depth \(d\)
output
But, we don't typically do 3-dimensional convolution. Instead:
We don't typically do 3-dimensional convolution, because
| ... | ||||
| ... | ||||
| ... | ||||
input tensor
one filter
2d output
- 3d tensor input, depth \(d\)
- 3d tensor filter, depth \(d\)
- 2d tensor (matrix) output
| ... | ||
| ... | ||
| ... | ... | ... |
| ... | ||
| ... | ||
| ... | ... | ... |
| ... | ||
| ... | ||
| ... | ... | ... |
\dots
\dots
input tensor
multiple filters
multiple output matrices
| ... |
| ... |
input tensor
\(k\) filters
output tensor
\dots
\dots
| ... | ||
| ... | ||
| ... | ... | ... |
\Bigg\{
d
\Bigg\{
d
\left\{
\begin{array}{l}
\\
\\
\\
\\
\\
\\
\\
\\
\\
\\
\end{array}
\right.
k
\left\{
\begin{array}{l}
\\
\\
\\
\end{array}
\right.
k
2. the use of multiple filters
1. color input
We'd encounter 3d tensor due to:

-- in doing 2-dimensional convolution
Outline
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
- Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
| ✅ | ||||
|---|---|---|---|---|
| ✅ | ||||
| ✅ | ||||
| ✅ | ||||
| ✅ | ||||
|---|---|---|---|---|

convolution
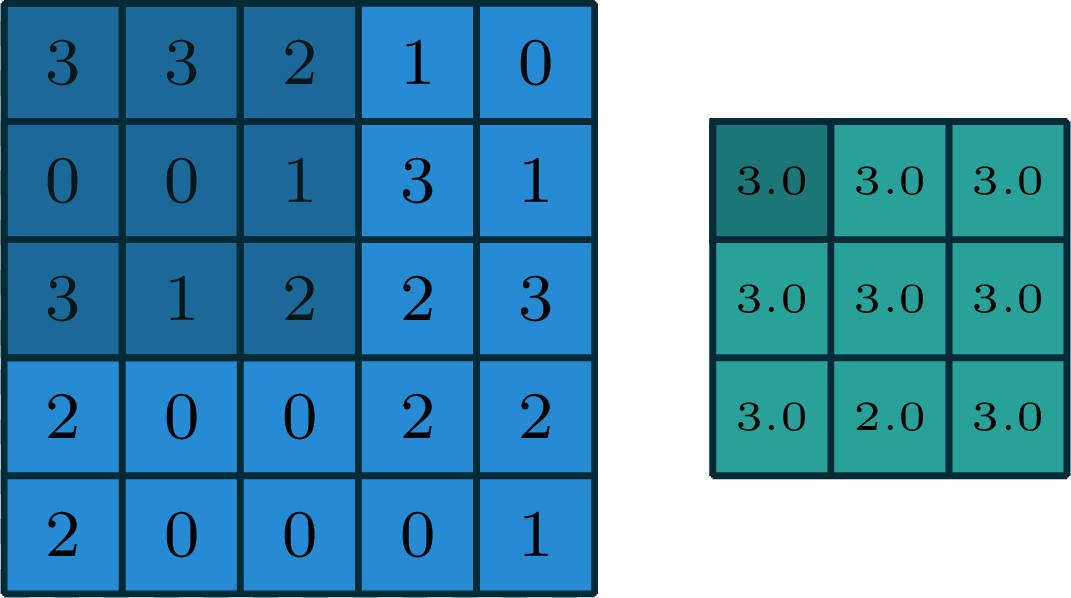
max pooling
slide w. stride
slide w. stride
1-dimensional pooling
no learnable parameter
filter weights are the learnable parameter
ReLU
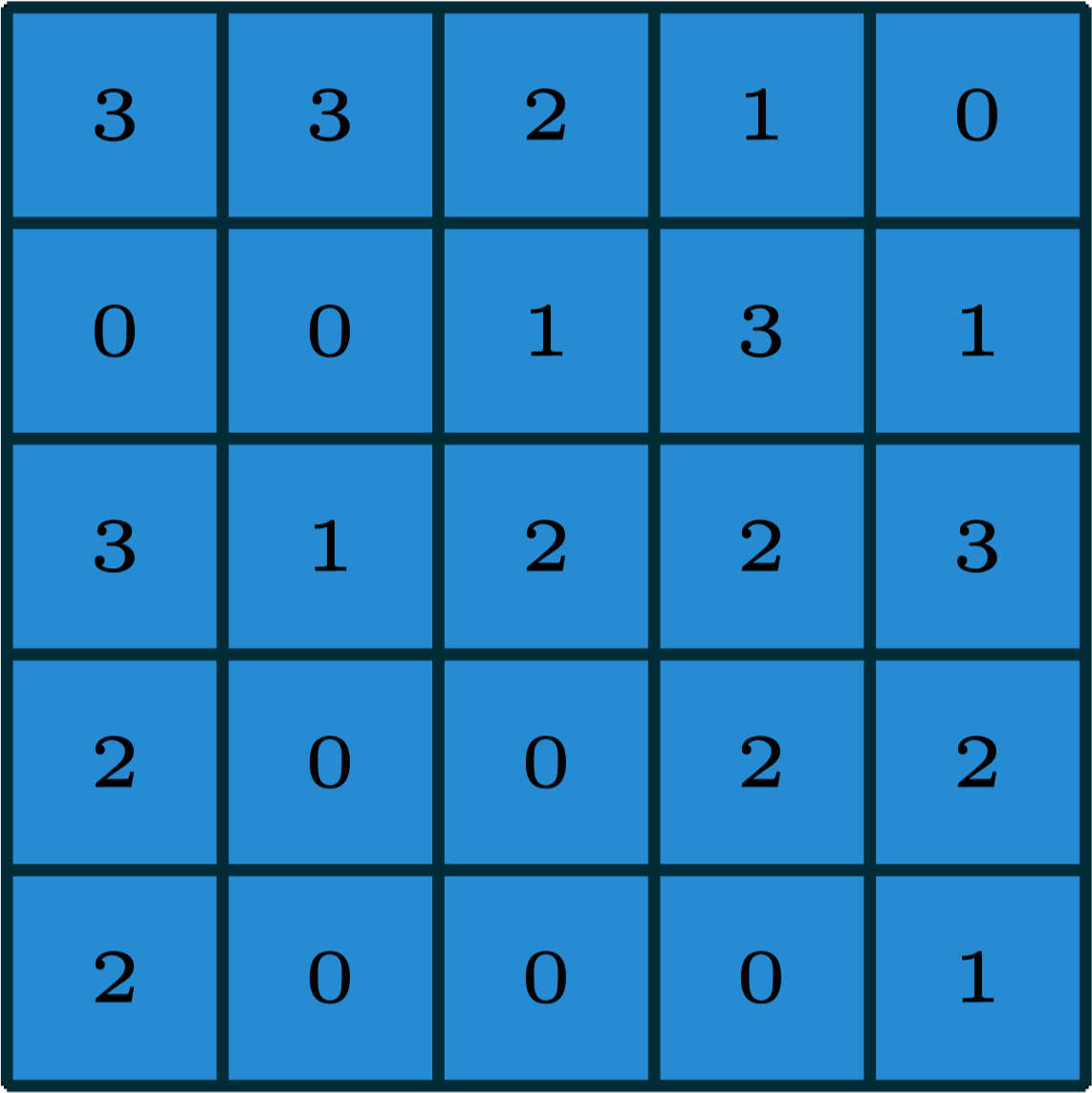
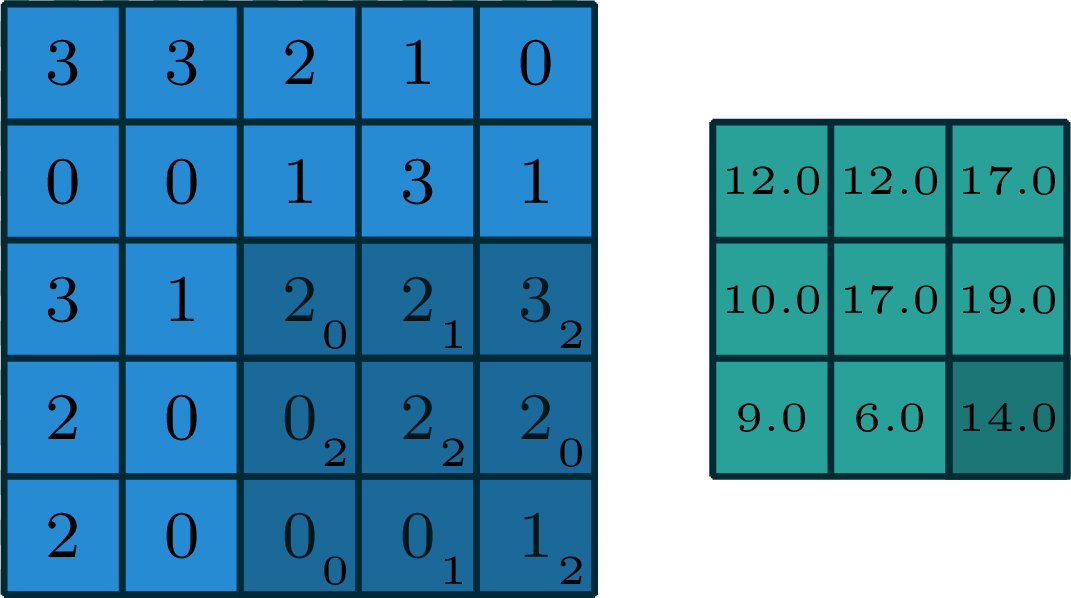
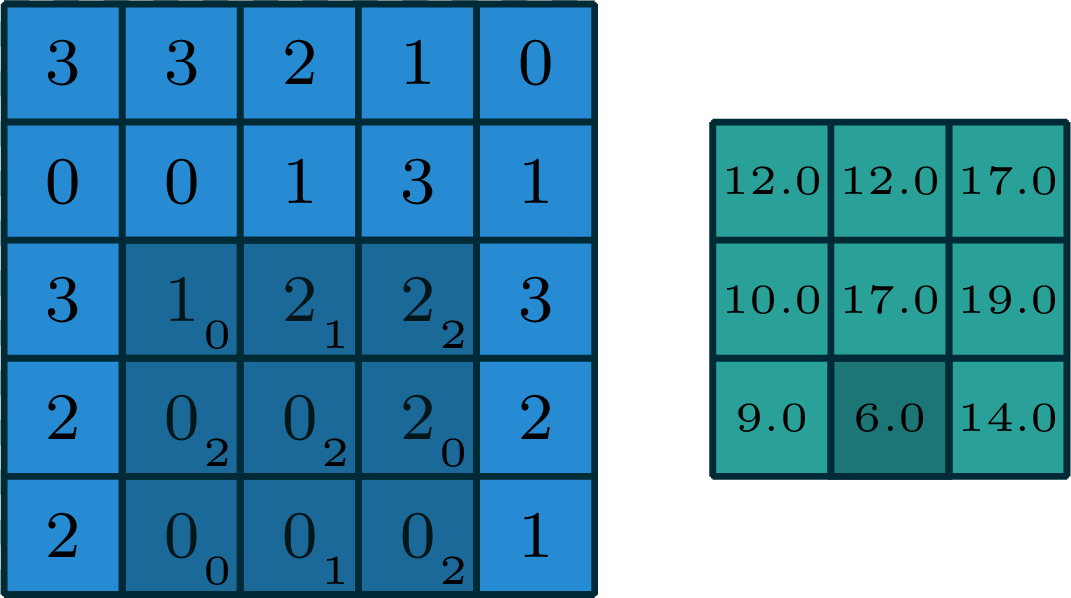
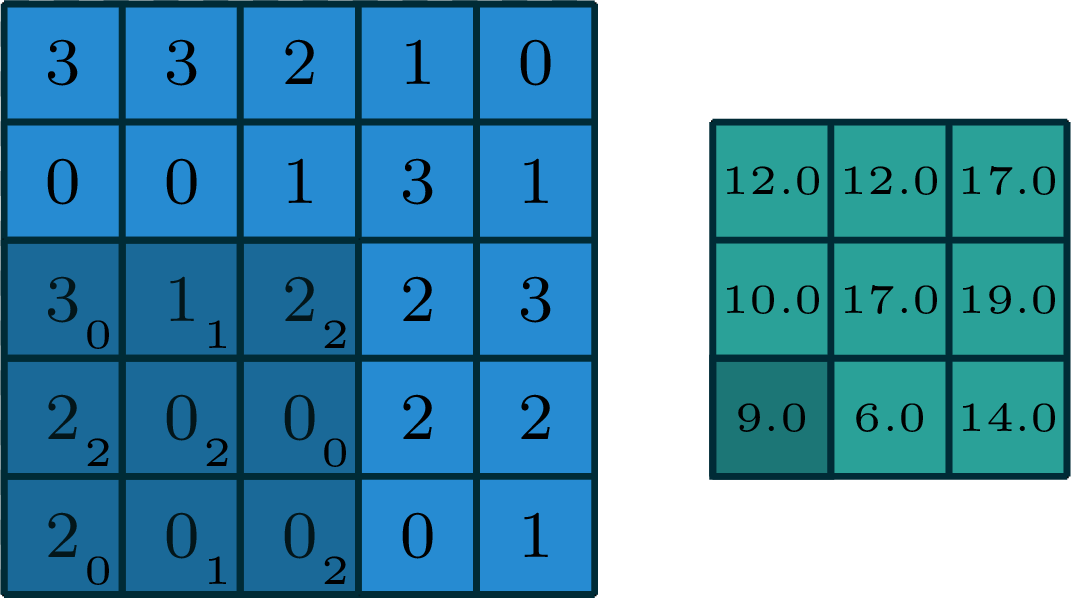
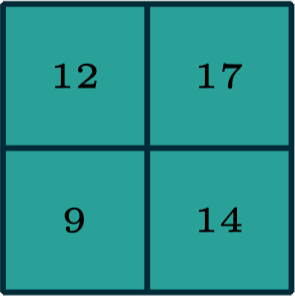
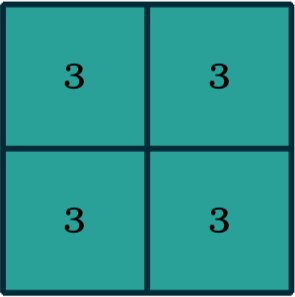
2-dimensional max pooling (example)
[image edited from vdumoulin]
[gif adapted from demo source]
- can choose filter size
- typically choose to have no padding
- typically a stride >1
- reduces spatial dimension
2-dimensional max pooling (example)
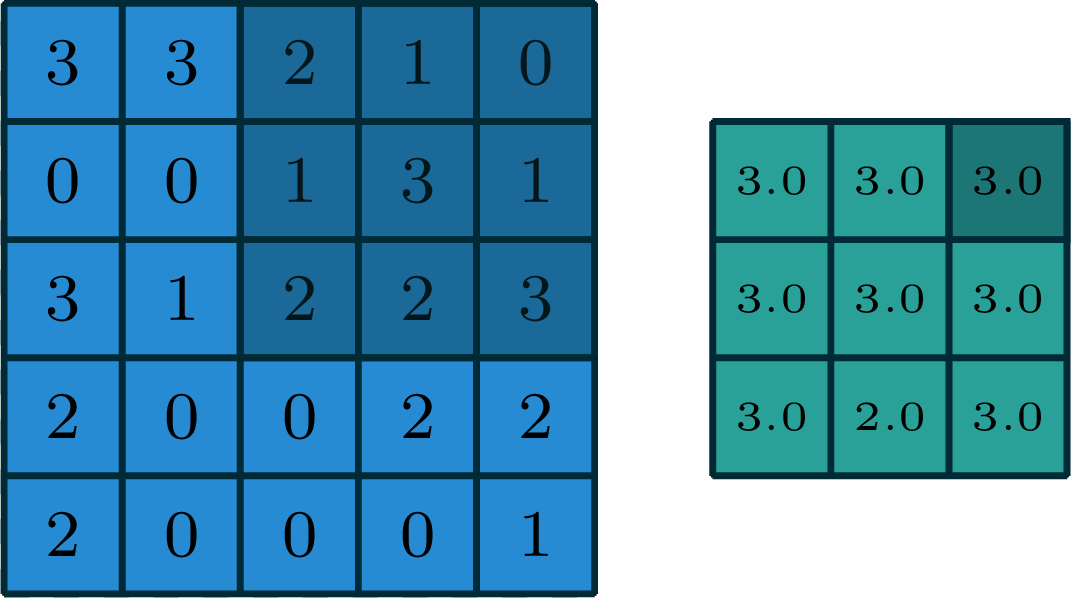
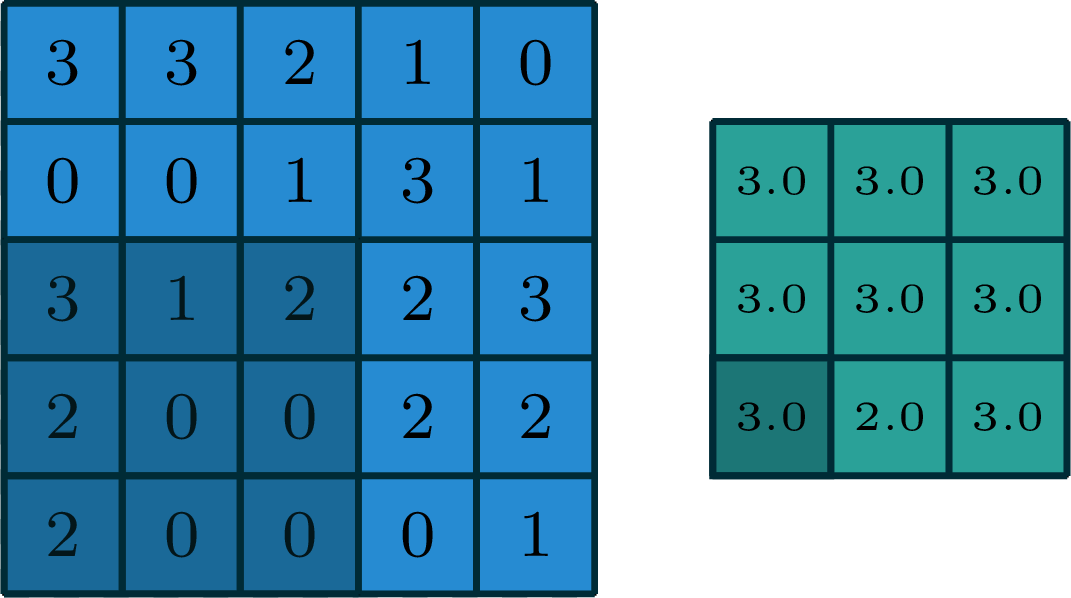
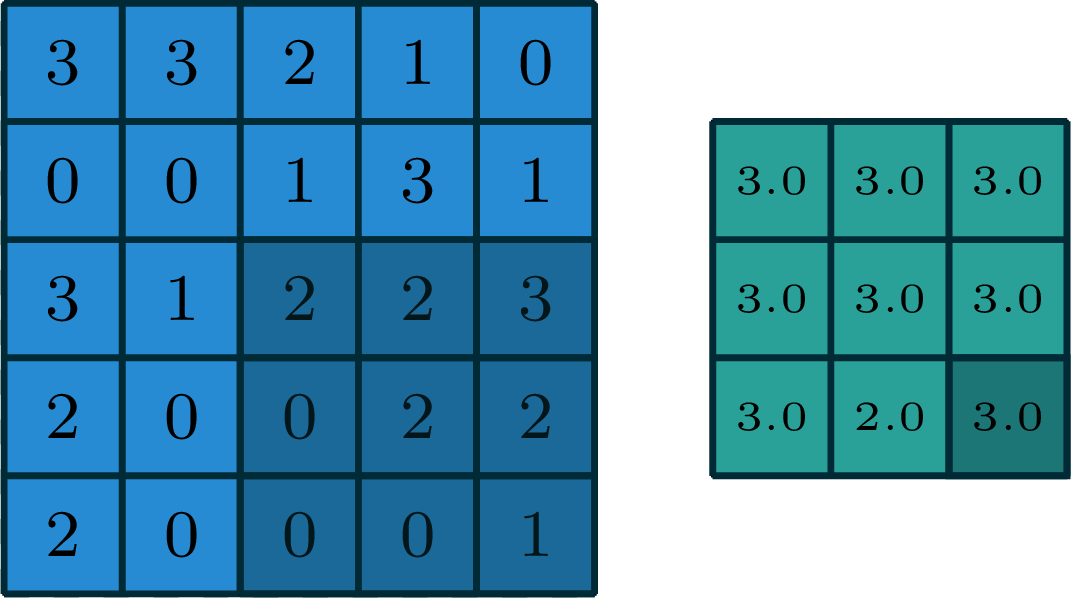
Pooling across spatial locations achieves invariance w.r.t. small translations:
\Bigg\{
\begin{array}{l}
\\
\\
\\
\\
\\
\end{array}
\Bigg.
\Bigg\{
\begin{array}{l}
\\
\\
\\
\\
\\
\end{array}
\Bigg.
\{
channel
channel
height
width
\{
width
height
\left\{
\begin{array}{l}
\\
\\
\end{array}
\right.
\Bigg\{
\begin{array}{l}
\\
\\
\\
\\
\\
\end{array}
\Bigg.
so the channel dimension remains unchanged after pooling.
pooling
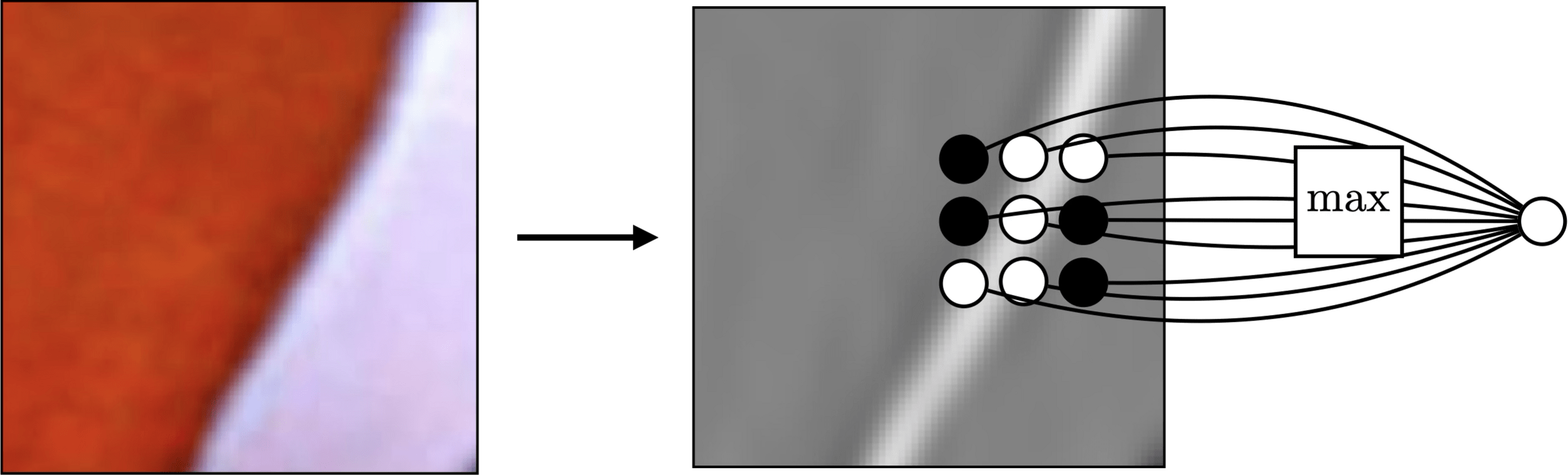
Pooling across spatial locations achieves invariance w.r.t. small translations:
[image credit Philip Isola]
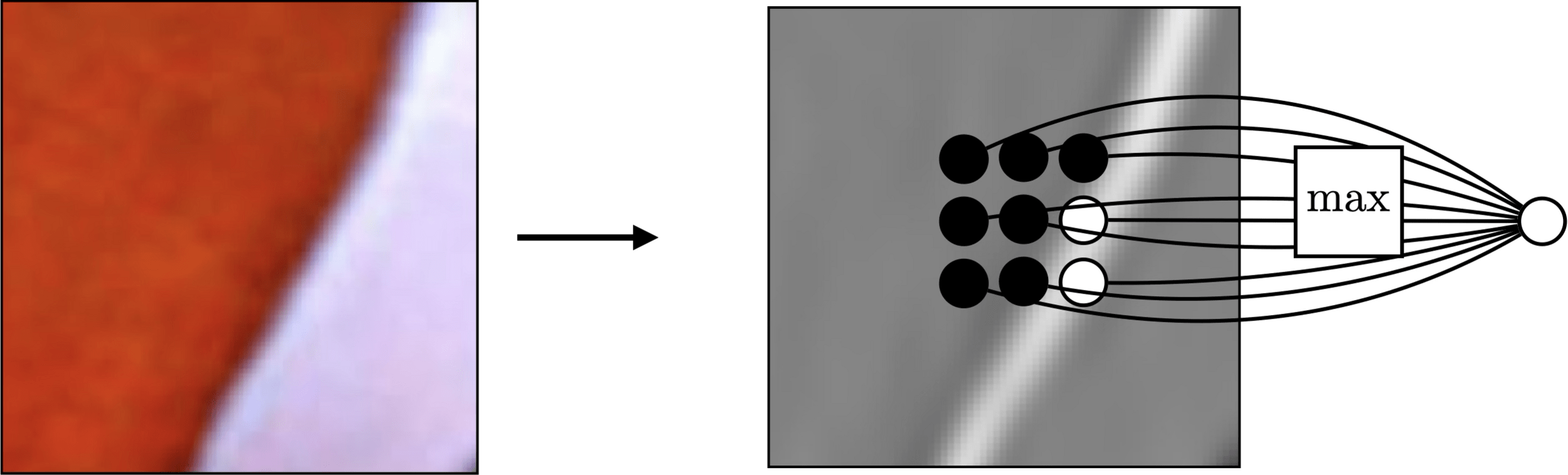
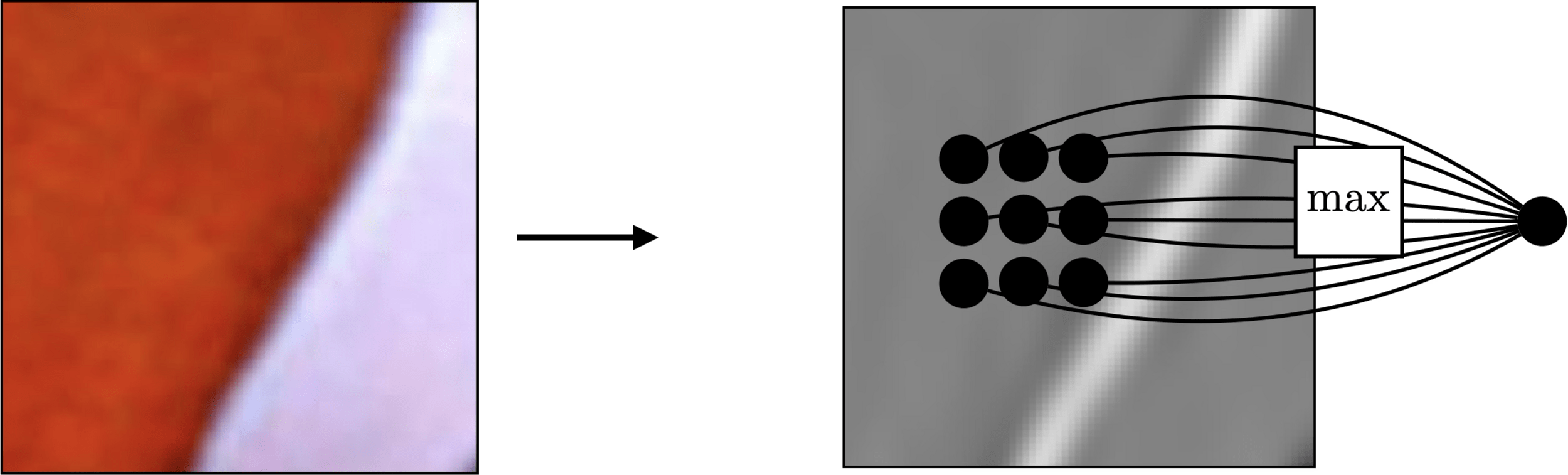
large response regardless of exact position of edge
Outline
- Recap, fully-connected net
- Vision problem structure
- Convolutional network structure
- Convolution
- 1-dimensional and 2-dimensional convolution
- 3-dimensional tensors
- Max pooling
- Case studies
filter weights
fully-connected neuron weights
prediction, loss \(\mathcal{L}\)
\nabla \mathcal{L}
[image credit Philip Isola]
[image credit Philip Isola]
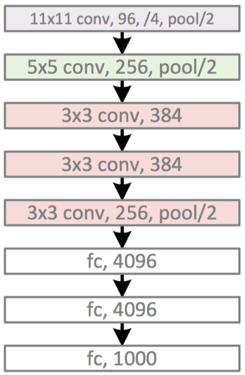
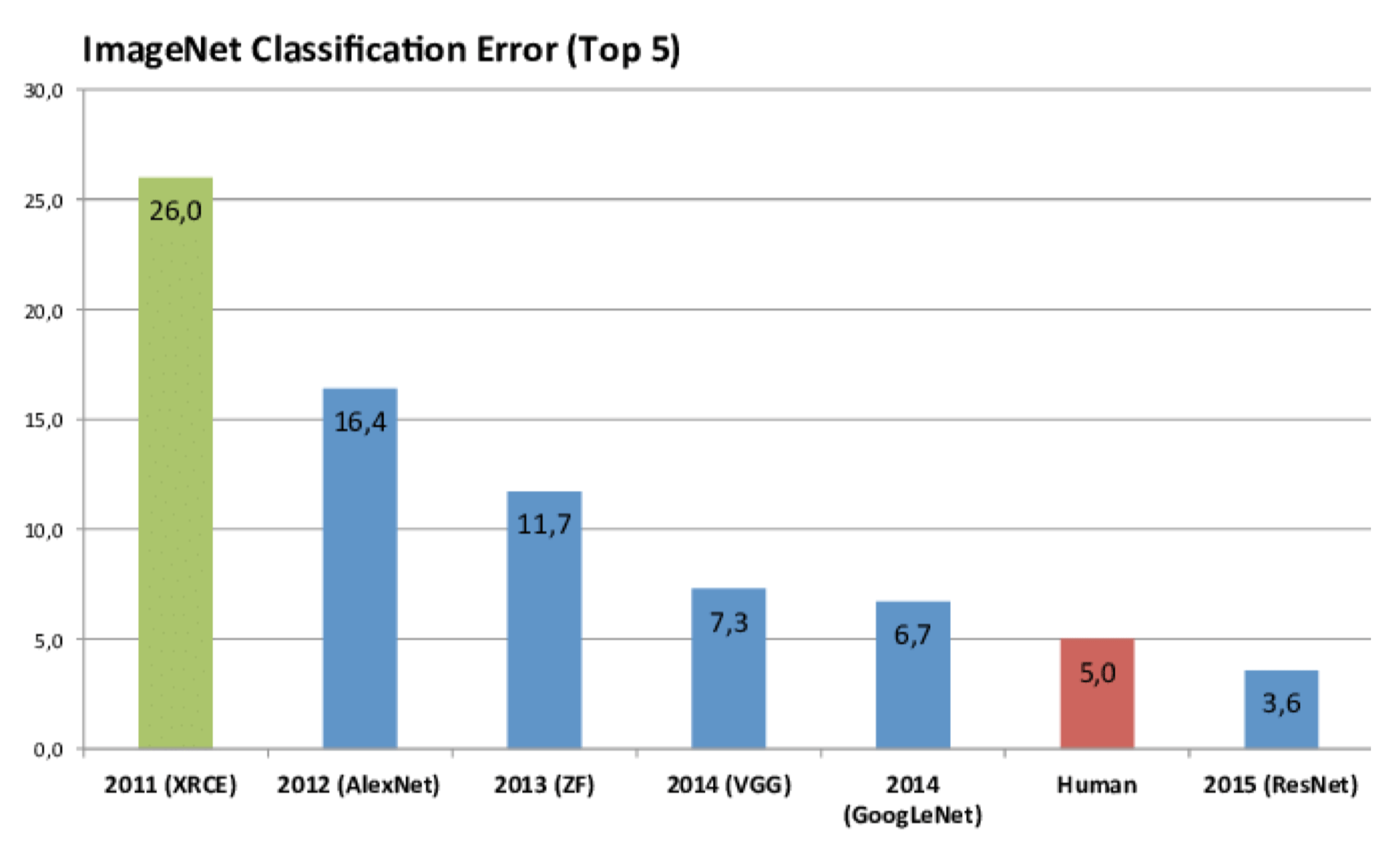
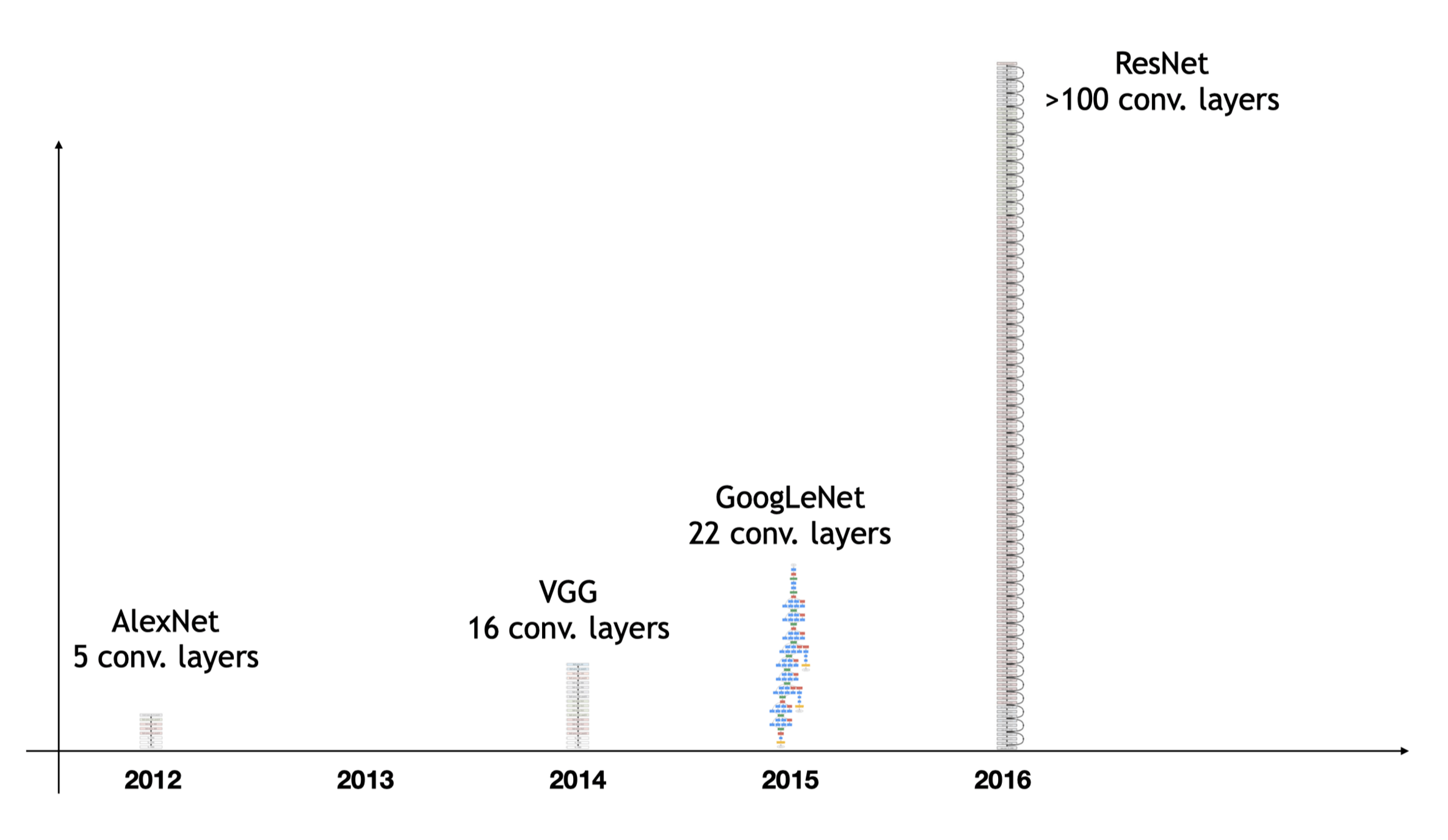
AlexNet '12
VGG '14
“Very Deep Convolutional Networks for Large-Scale Image Recognition”, Simonyan & Zisserman. ICLR 2015
[image credit Philip Isola and Kaiming He]
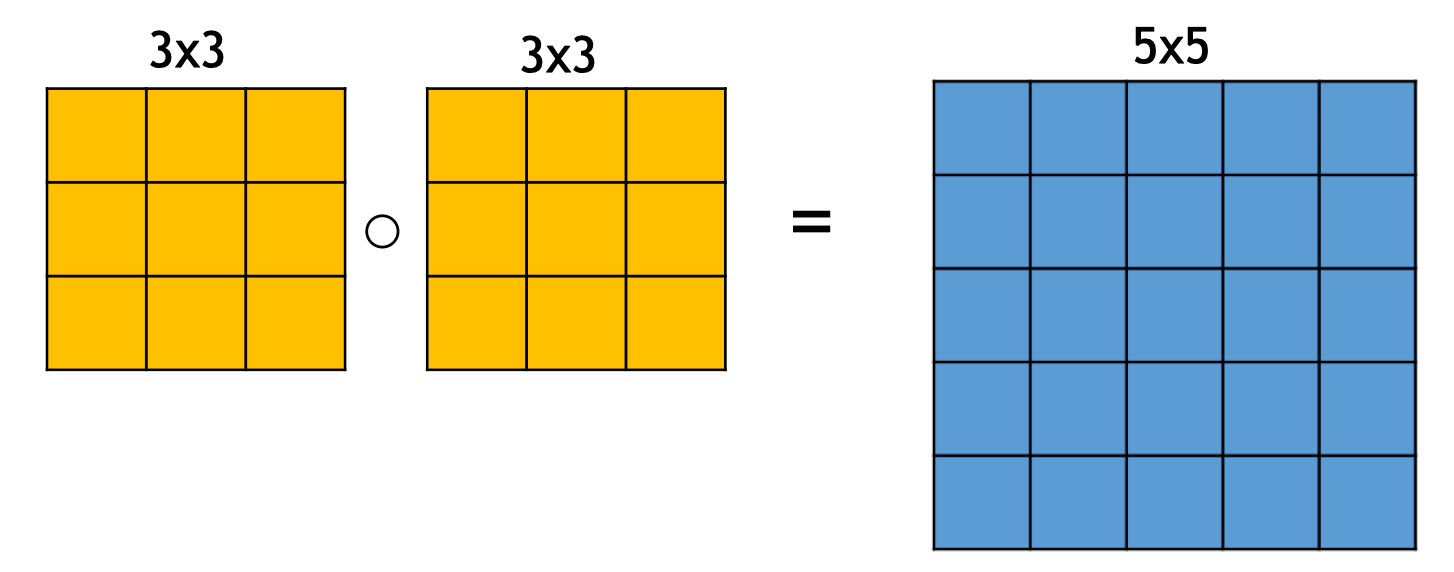
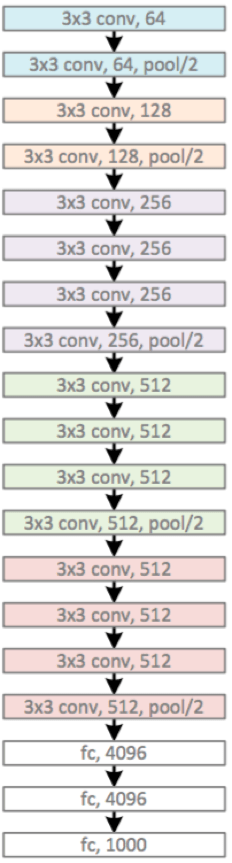
VGG '14
Main developments:
- small convolutional kernels: only 3x3
- increased depth: about 16 or 19 layers
- stack the same modules
VGG '14
[He et al: Deep Residual Learning for Image Recognition, CVPR 2016]
[image credit Philip Isola and Kaiming He]


ResNet '16
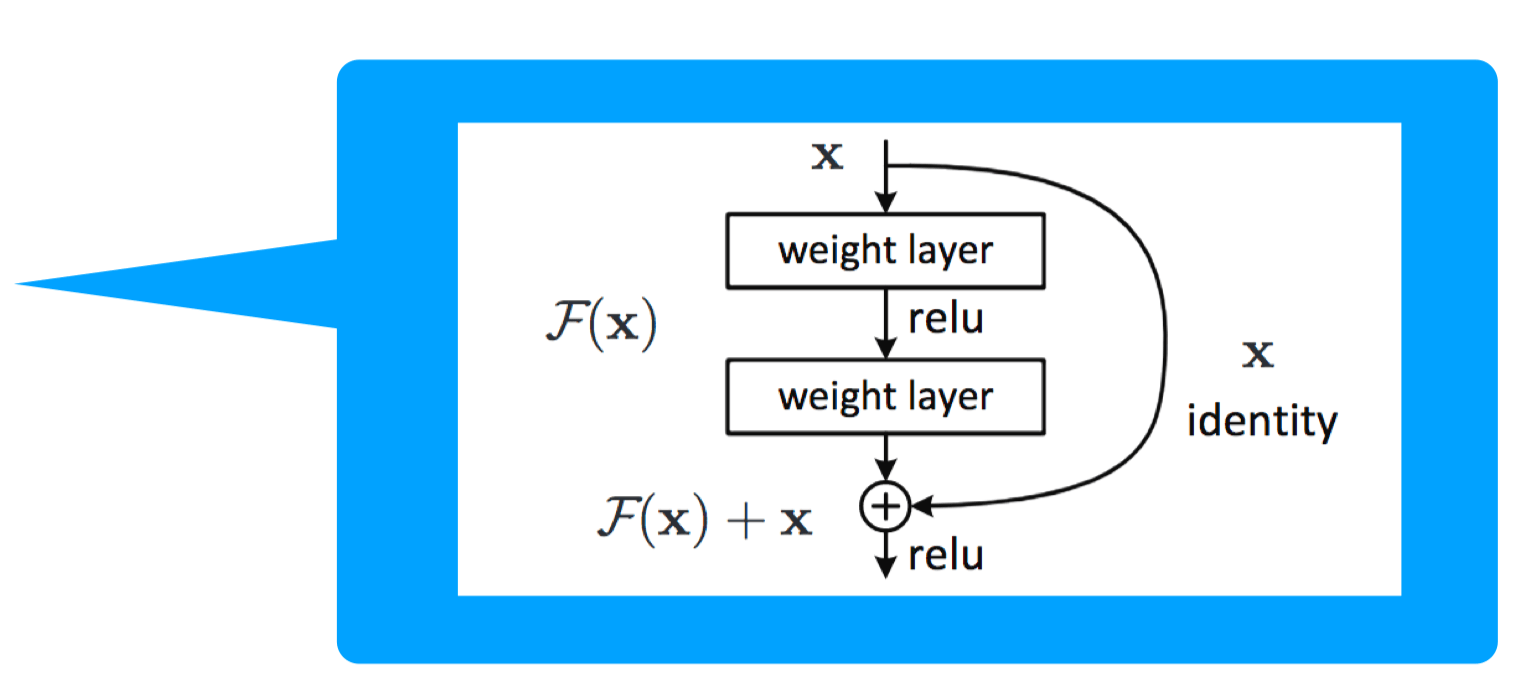
Main developments:
- Residual block -- gradients can propagate faster (via the identity mapping)
- increased depth: > 100 layers
Summary
- Though NN are technically “universal approximators”, designing the NN structure so that it matches what we know about the underlying structure of the problem can substantially improve generalization ability and computational efficiency.
- Images are a very important input type and they have important properties that we can take advantage of: visual hierarchy, translation invariance, spatial locality.
- Convolution is an important image-processing technique that builds on these ideas. It can be interpreted as locally connected network, with weight-sharing.
- Pooling layer helps aggregate local info effectively, achieving bigger receptive field.
- We can train the parameters in a convolutional filtering function using backprop and combine convolutional filtering operations with other neural-network layers.
Thanks!
We'd love to hear your thoughts.
6.390 IntroML (Fall24) - Lecture 8 Convolutional Neural Networks
By Shen Shen




