Dojo:
A differentiable physics engine for robotics
Taylor Howell and Simon Le Cleac'h
Dojo prioritizes
physical accuracy
and
differentiability
what is Dojo and what can it do?
doesn't
MuJoCo/Drake/Bullet/Brax
already do that?

popular simulators
https://leggedrobotics.github.io/SimBenchmark/
popular simulators
https://leggedrobotics.github.io/SimBenchmark/
popular simulators
https://leggedrobotics.github.io/SimBenchmark/
popular simulators
https://leggedrobotics.github.io/SimBenchmark/
popular simulators
https://leggedrobotics.github.io/SimBenchmark/
popular simulators
https://leggedrobotics.github.io/SimBenchmark/
https://github.com/dojo-sim/Dojo.jl
- send us your Github username to be added to Dojo organization
- star the repository (please!)
- maximal-coordinates representation
- variational integrator
- higher-fidelity contact model
- custom interior-point solver
- smooth gradients
Dojo
maximal-coordinates representation

z^{(i)} = (p^{(i)}, v^{(i)}, q^{(i)}, \omega^{(i)})
Linear-Time Variational Integrators in Maximal Coordinates. J. Brudigam and Z. Manchester.
Linear-Time Contact and Friction Dynamics in Maximal Coordinates using Variational Integrators.
J. Brudigam and Z. Manchester.
Linear-Quadratic Optimal Control in Maximal Coordinates. J. Brudigam and Z. Manchester.
Altas' sparsity pattern

variational integrator
Newton:
F = ma
m(p_+ -2p +p_-)/h - hmg = 0
Discrete mechanics and variational integrators. J. E. Marsden and M. West.
variational integrator

Euler:
J\dot{\omega} + \omega \times (I \omega) = \tau
energy and momentum conservation

Dzhanibekov effect
astronaut
Simulation Tools for Model-Based Robotics: Comparison of Bullet, Havok, MuJoCo, ODE and PhysX.
T. Erez, Y. Tassa, and E. Todorov.
energy and momentum conservation

contact model
impact
\gamma \geq 0 \quad \quad \phi(z) \geq 0 \\
\gamma \circ \phi(z) = 0
An Implicit Time-Stepping Scheme for Rigid Body Dynamics with Inelastic Collisions and Coloumb Friction. D. E. Stewart and J. C. Trinkle.
impact
Dojo
MuJoCo
contact model

friction
On unilateral constraints, friction and plasticity. J. J. Moreau.
friction cones
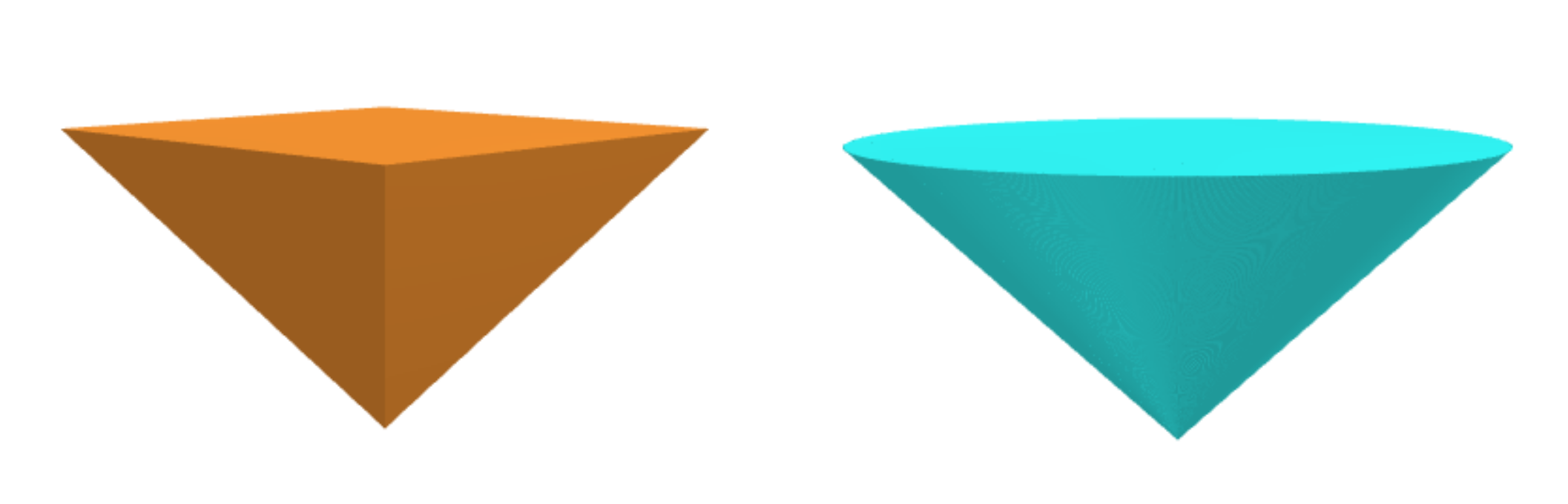
approximation
exact
friction cones
Subtitle

interior-point solver

gradients

gradients

gradients
implicit-function theorem
Lezioni di analisi infinitesimale. U. Dini.
trajectory optimization

Dojo: success
MuJoCo: success
Dojo: success
MuJoCo: failure
examples
trajectory optimization

optimized with iterative LQR



reinforcement learning
Subtitle


augmented random search to train static linear policies
reinforcement learning

augmented random search v. augmented gradient search
system identification
ContactNets: Learning Discontinuous Contact Dynamics with Smooth, Implicit Representations. S. Pfrommer, M. Halm, and M. Posa.

system identification
learning via quasi-Newton method
geometry
friction coefficient
ContactNets: Learning Discontinuous Contact Dynamics with Smooth, Implicit Representations. S. Pfrommer, M. Halm, and M. Posa.
system identification


Dojo gradient

system identification

real-to-sim
project ideas
- space-debris collection
- adaptive time-stepping
- GPU/ADMM simulation
- contact-implicit MPC
- Dojo + NeRF
- meta-meta learning
Dojo: A Differentiable Physics Engine for Robotics
By simonlc
Dojo: A Differentiable Physics Engine for Robotics
Presentation Dojo: A Differentiable Physics Engine for Robotics for the Differentiable Simulation for Robotics workshop at RSS 2022



