talks
Simon Le Cleac'h
august 16, 2022
Simon Le Cleac'h
contact is the primary mode of interaction in robotics


challenges
- not differentiable
- classical optimization methods fail
- RL has shown impressive results but
- gradient-free
- ignores dynamics model
question
how can we leverage models and gradient information to solve contact-rich robotics tasks?
- data generator for robotics optimization
differentiable physics engine
- robot's internal model of the world
- simulate contact and provide gradients
optimization problems
| control parameters | state parameters | model parameters |
|---|
decision variables
performance criteria
| optimal control |
motion synthesis | mechanism design |
| imitation learning | state estimation | system identification |
| movement costs |
|---|
| model-data mismatch |
Emo Todorov, Optico: A Framework for Model-Based Optimization with MuJoCo Physics, NeurIPS 2019
optimization as an oracle
- trajectory optimization with privileged information
- can generate a lot of 'expert demonstrations' for a learning algorithm
- useful gradient information
differentiable physics engine
- stable and accurate simulation

contact physics
LCP
implicit complementarity
gradients
samples
subgradient
existing physics engines
Dojo key ideas
stability at low rates
variational integrator
interior-point methods
accurate contact dynamics
implicit differentiation
smooth gradients

m(p_+ -2p +p_-)/h - hmg = 0
Discrete mechanics and variational integrators. J. E. Marsden and M. West.
S = \int_{t_1}^{t_2}{\mathcal{L} dt}
discretize
discretize
Euler-Lagrange
Euler-Lagrange
F = m a
p_+ = p + h (v + mg)
S_D = h \sum_{i=1}^{N} \mathcal{L}_i
variational integrator
variational integrator
-
compare astronaut energy and momentum conservation to MuJoCo
- Dojo performs orders of magnitude better
- stability at low rates
t = 0s
t = 1s
accurate contact dynamics
MuJoCo linear
Dojo linear
MuJoCo nonlinear
Dojo nonlinear
no collision violations
correct Coulomb friction
interior-point method
impact → inequalities
friction → second-order cone
cone constraints
custom interior-point solver
- Mehrotra predictor-corrector algorithm
- CVXOpt second-order cones
- non-Euclidean support for quaternions
accurate contact dynamics
nonlinear complementarity problem
accurate contact dynamics
custom interior-point solver
accurate contact dynamics




embedding learned models
f(x_{t+1}, x_t, u_t; \theta) = 0
physics
physics
robot
environment
object
learned
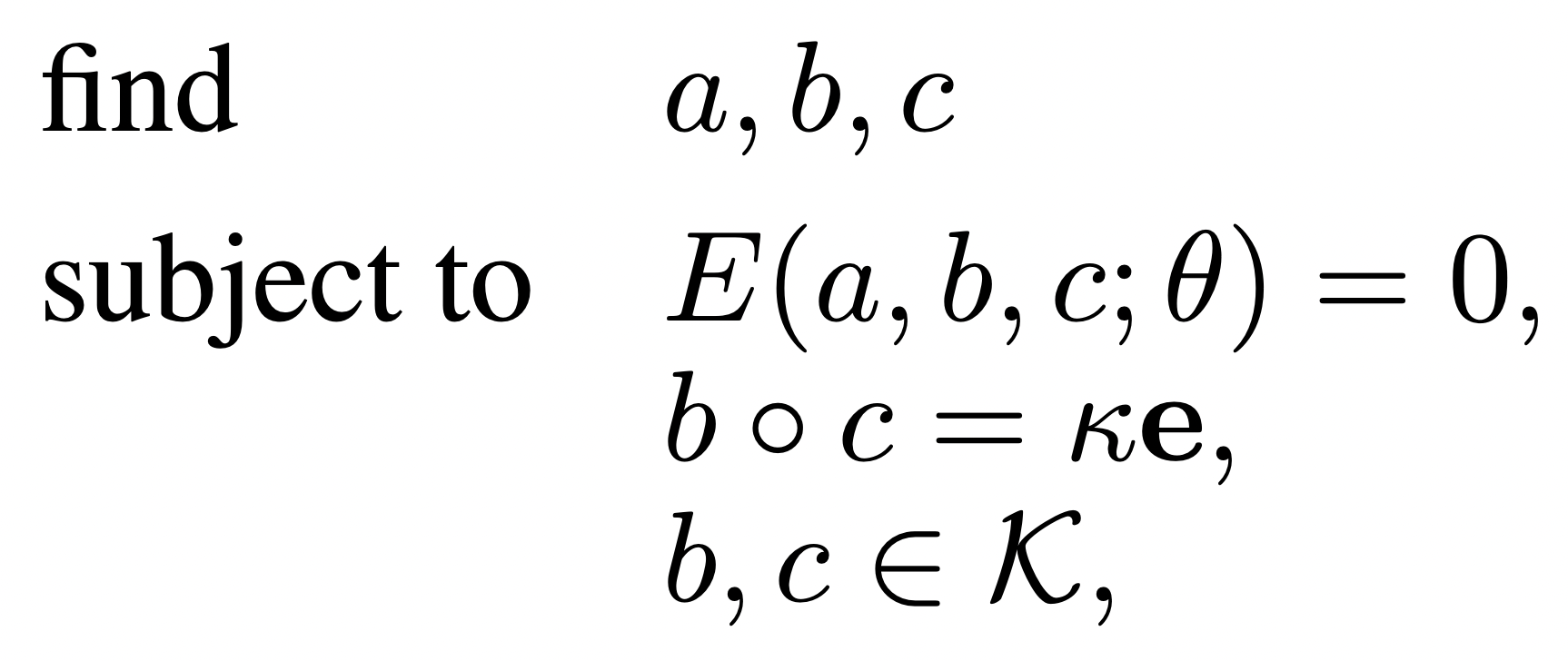
r(w^*; \theta) = 0
→
smooth gradients
\big\{
residual
solution
\big\{
\big\{
parameters
sensitivity of solution w.r.t problem data
computation cost of gradient is less than simulation step
smooth gradients
Lezioni di analisi infinitesimale. U. Dini.
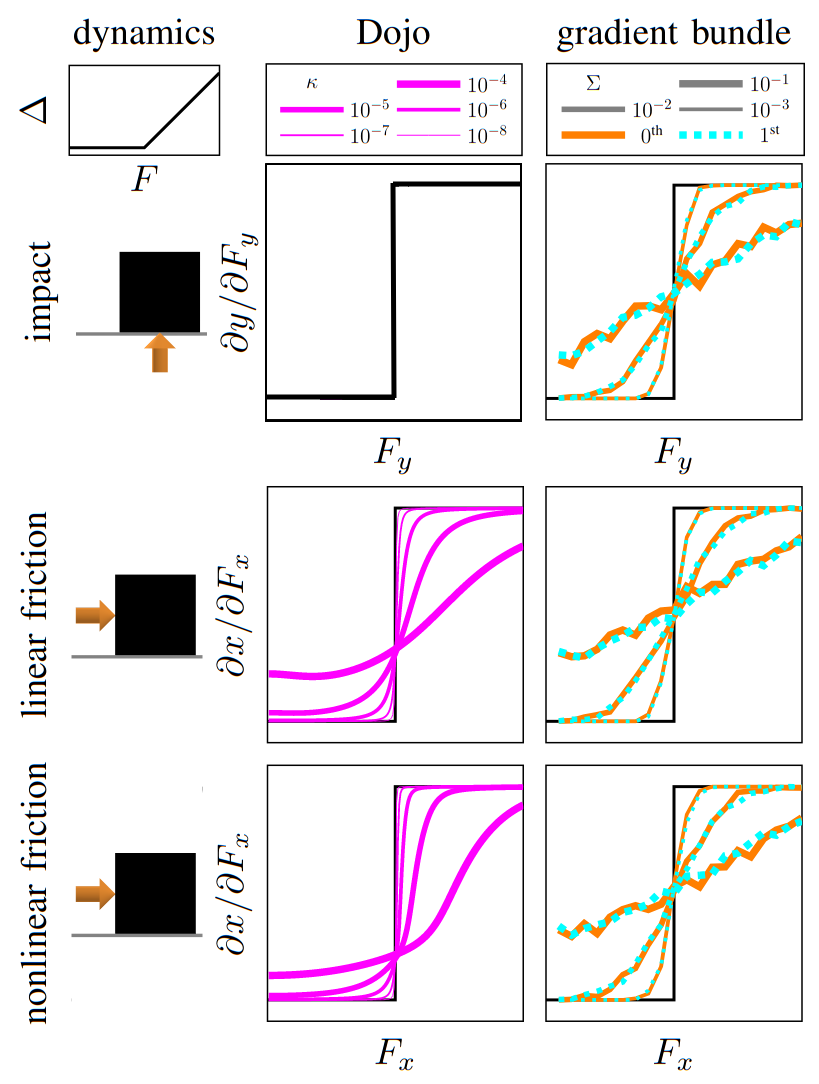
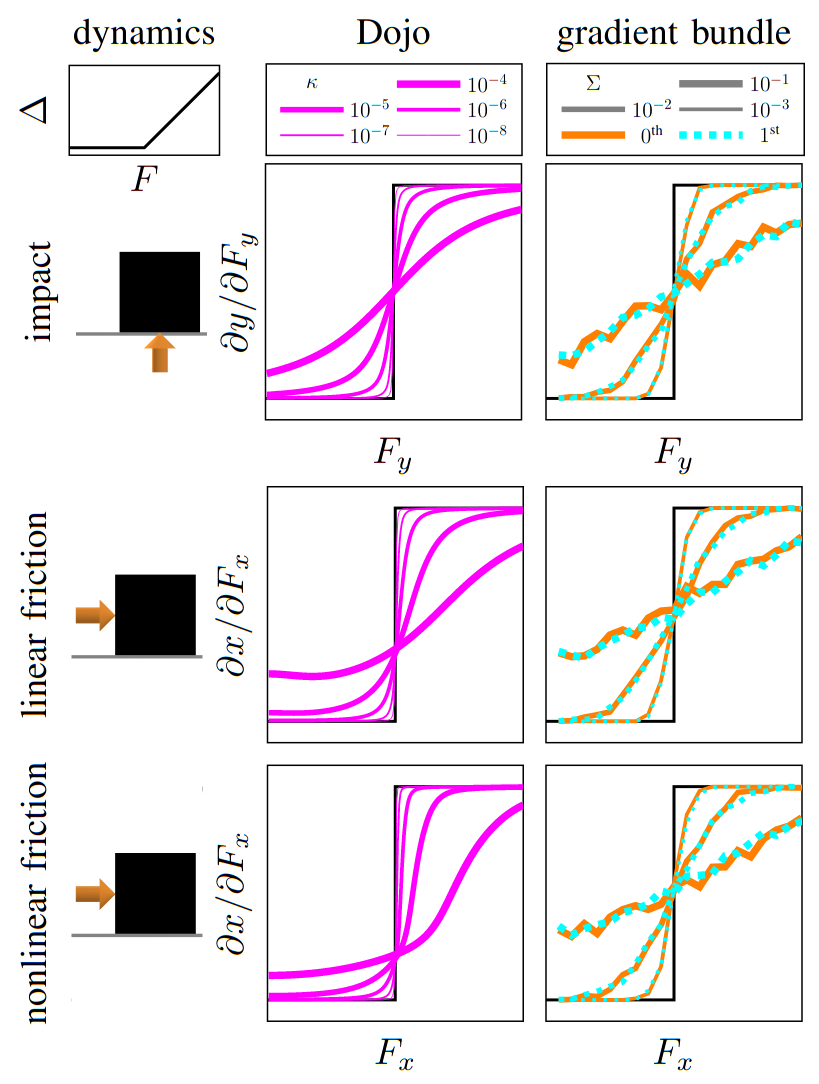
Dojo gradients vs sampling
less expensive to compute compared to finite-difference or stochastic sampling
randomized smoothing
finite difference
Dojo
matrix backward substitution
\mathcal{O}(n^2)
matrix factorization
\mathcal{O}(n^3)
matrix factorization
\mathcal{O}(n^3)
Dojo's gradient vs MuJoCo's finite difference
t = 0s
t = 1s
box push
non-smooth dynamics
gradient comparison
Dojo
randomized smoothing
differentiate intermediate barrier problems for smooth gradients
Dojo gradients vs sampling
examples
trajectory optimization

smooth-gradient-based optimization with iterative LQR
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
reinforcement learning


train static linear policies for locomotion
gradients enable 5-10x sample-complexity improvement over derivative-free method
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
system identification
ContactNets: Learning Discontinuous Contact Dynamics with Smooth, Implicit Representations. S. Pfrommer, M. Halm, and M. Posa.
learned
ground-truth
real-word dataset
Dojo environment
system identification
geometry
friction coefficient
ground-truth
learned
Quasi-Newton method utilizes gradients to
learn parameters to 95% accuracy in 20 steps
model-predictive control
Fast Contact-Implicit Model-Predictive Control.
S. Le Cleac'h & T. Howell, C. Lee, S. Yang, M. Schwager, Z. Manchester
simulation
push recovery
behavior generation
running policy at 200-500Hz
related work
Global Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-dynamic Contact Models, Tao Pang∗, H.J. Terry Suh∗, Lujie Yang and Russ Tedrake,
RRT using the same smoothed derivatives as Dojo
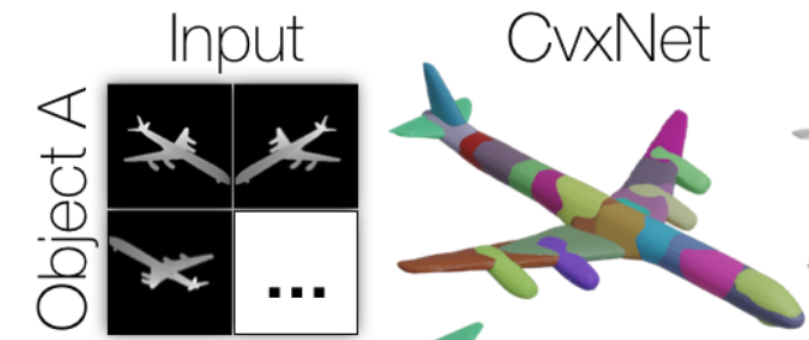
NeRF
Differentiable Physics Simulation of Dynamics-Augmented Neural Objects. S. Le Cleac'h, HX. Yu, M. Guo, T. Howell, R. Gao, J. Wu, Z. Manchester, M. Schwager
dynamics-augmented NeRF → complex collision geometries
optimization problems
| control parameters | state parameters | model parameters |
|---|
decision variables
performance criteria
| optimal control |
motion synthesis | mechanism design |
| imitation learning | state estimation | system identification |
| movement costs |
|---|
| model-data mismatch |
Emo Todorov, Optico: A Framework for Model-Based Optimization with MuJoCo Physics, NeurIPS 2019
differentiable optimization modules

differentiable simulator
online optimization-based policy
(MPC, etc.)
control inputs
gradients
gradients
offline optimization
(RL, RRT, etc.)
motion plans
trajectories
optimization as a differentiable module
- build fast robust and differentiable optimization tools:
- sysID
- motion generation
- optimal control
- state estimation
- etc.
- can act as layers or differentiable modules in a larger control struture
- MPC autotuning
- MPC with neural networks bits





Taylor Howell
Simon Le Cleac'h
Jan Brüdigam
Zico Kolter
Mac Schwager
Zachary Manchester
team

Shuo Yang
Chi Yen Lee
Sumeet Singh
Simon Le Cleac'h
Pete Florence


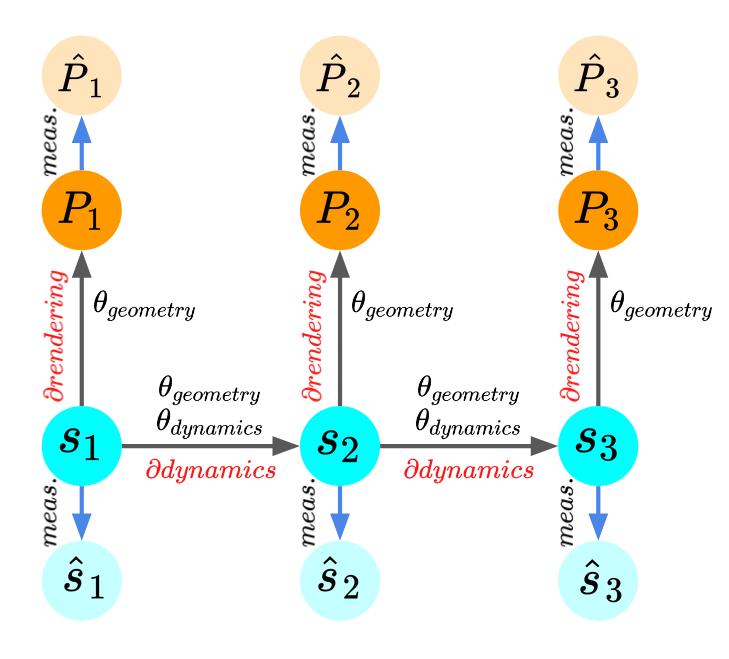
hierarchical implicit representation for manipulation planning
differentiable
simulation
sensor data
point cloud data
noisy pose measurements
geometry, friction, mass, etc.
learned dynamics representation
hierarchical implicit representation for manipulation planning
hierarchical implicit representation for manipulation planning
hierarchical implicit representation for manipulation planning
differentiable
dynamics
differentiable
point cloud
hierarchical implicit representation for manipulation planning
hierarchical implicit representation for manipulation planning
Sumeet Singh
Simon Le Cleac'h
Pete Florence
hierarchical implicit representation for manipulation planning
SBPL group
august 10, 2022
Simon Le Cleac'h
a differentiable physics engine for robotics
Simon Le Cleac'h and Taylor Howell
Taylor Howell
Simon Le Cleac'h
team
thowell@stanford.edu
simonlc@stanford.edu
contact physics
LCP
implicit complementarity
gradients
samples
subgradient
existing physics engines
Dojo key ideas
stability at low rates
variational integrator
interior-point methods
accurate contact dynamics
implicit differentiation
smooth gradients
m(p_+ -2p +p_-)/h - hmg = 0
Discrete mechanics and variational integrators. J. E. Marsden and M. West.
S = \int_{t_1}^{t_2}{\mathcal{L} dt}
discretize
discretize
Euler-Lagrange
Euler-Lagrange
F = m a
p_+ = p + h (v + mg)
S_D = h \sum_{i=1}^{N} \mathcal{L}_i
variational integrator
variational integrator
-
compare astronaut energy and momentum conservation to MuJoCo
- Dojo performs orders of magnitude better
- stability at low rates
t = 0s
t = 1s
accurate contact dynamics
MuJoCo linear
Dojo linear
MuJoCo nonlinear
Dojo nonlinear
no collision violations
correct Coulomb friction
interior-point method
impact → inequalities
friction → second-order cone
cone constraints
nonlinear complementarity problem
accurate contact dynamics
custom interior-point solver
- Mehrotra predictor-corrector algorithm
- CVXOpt second-order cones
- non-Euclidean support for quaternions
accurate contact dynamics
r(w^*; \theta) = 0
→
smooth gradients
\big\{
residual
solution
\big\{
\big\{
parameters
sensitivity of solution w.r.t problem data
computation cost of gradient is less than simulation step
differentiate intermediate barrier problems for smooth gradients
smooth gradients
Lezioni di analisi infinitesimale. U. Dini.
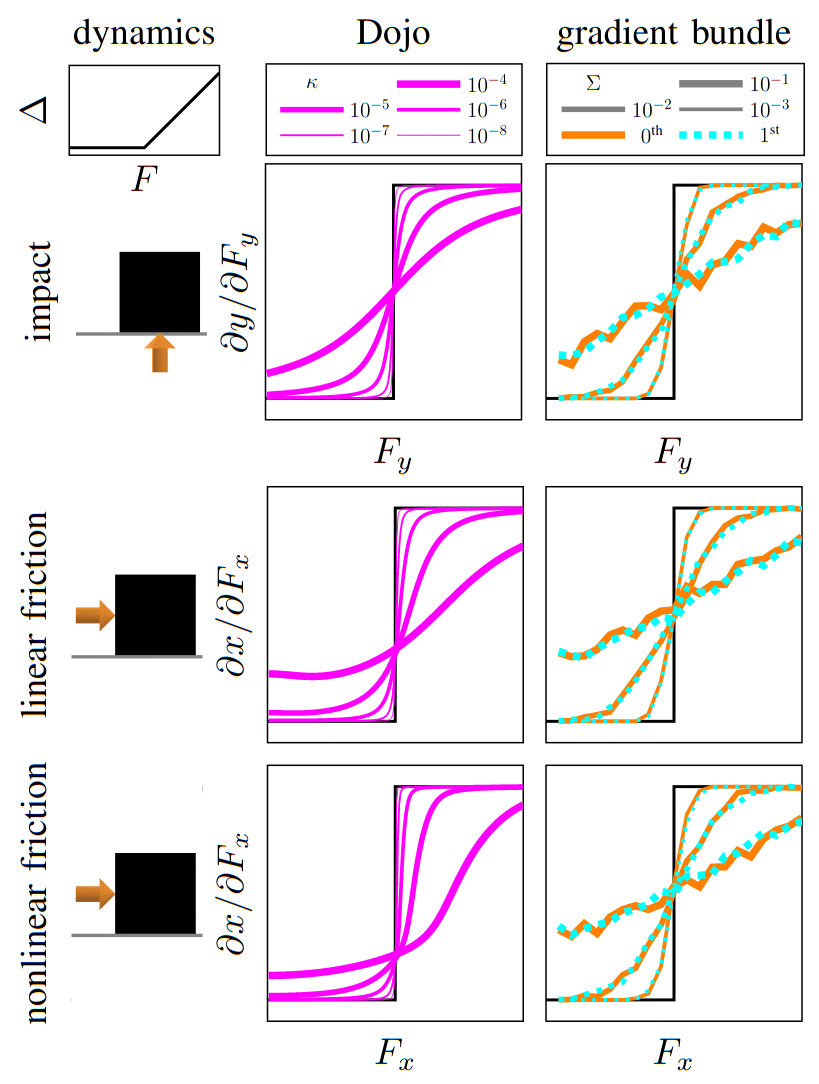
Dojo gradients vs sampling
box push
non-smooth dynamics
gradient comparison
Dojo
randomized smoothing
less expensive to compute compared to finite-difference or stochastic sampling
Dojo gradients vs sampling
less expensive to compute compared to finite-difference or stochastic sampling
randomized smoothing
finite difference
Dojo
matrix backward substitution
\mathcal{O}(n^2)
matrix factorization
\mathcal{O}(n^3)
matrix factorization
\mathcal{O}(n^3)
maximal-coordinates representation



minimal-coordinates
representation

(x,v,q,\omega) \in \mathbf{R}^{13}
(\theta_1, \dot{\theta}_1) \in \mathbf{R}^2
(\theta_2, \dot{\theta}_2) \in \mathbf{R}^2
(\theta_3, \dot{\theta}_3) \in \mathbf{R}^2
\mathbf{R}^{37}
maximal-coordinates
representation
(x_1,v_1,q_1,\omega_1) \in \mathbf{R}^{13}
\mathbf{R}^{169}
(x_2,v_2,q_2,\omega_2) \in \mathbf{R}^{13}
(x_3,v_3,q_3,\omega_3) \in \mathbf{R}^{13}
(x_4,v_4,q_4,\omega_4) \in \mathbf{R}^{13}
maximal-coordinates representation
Linear-Time Variational Integrators in Maximal Coordinates. J. Brudigam and Z. Manchester.
Linear-Time Contact and Friction Dynamics in Maximal Coordinates using Variational Integrators.
J. Brudigam and Z. Manchester.

github.com/dojo-sim
- Julia package: Dojo.jl
- gym-like environments
- Python wrapper: dojopy
- interface w/ PyTorch & JAX

open-source implementation
examples
trajectory optimization
smooth-gradient-based optimization with iterative LQR
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
reinforcement learning
train static linear policies for locomotion
gradients enable 5-10x sample-complexity improvement over derivative-free method
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
system identification
ContactNets: Learning Discontinuous Contact Dynamics with Smooth, Implicit Representations. S. Pfrommer, M. Halm, and M. Posa.
learned
ground-truth
real-word dataset
Dojo environment
system identification
geometry
friction coefficient
ground-truth
learned
Quasi-Newton method utilizes gradients to
learn parameters to 95% accuracy in 20 steps
related work
Global Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-dynamic Contact Models, Tao Pang∗, H.J. Terry Suh∗, Lujie Yang and Russ Tedrake,
RRT using the same smoothed derivatives as Dojo
NeRF
Differentiable Physics Simulation of Dynamics-Augmented Neural Objects. S. Le Cleac'h, HX. Yu, M. Guo, T. Howell, R. Gao, J. Wu, Z. Manchester, M. Schwager
dynamics-augmented NeRF → complex collision geometries
model-predictive control
Fast Contact-Implicit Model-Predictive Control.
S. Le Cleac'h & T. Howell, C. Lee, S. Yang, M. Schwager, Z. Manchester
simulation
push recovery
behavior generation
running policy at 200-500Hz
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{dynamics}(x_{t+1}, \gamma) = 0\\
% \quad \:\: \textbf{sdf}(x_{t+1}) = \phi \\
% \gamma \circ \phi = 0 \\
% \gamma, \phi \geq 0 \\
nonlinear complementarity problem (NCP)
impact force
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{dynamics}(x_{t+1}, \gamma) = 0\\
\quad \:\: \textbf{sdf}(x_{t+1}) = \phi \\
% \gamma \circ \phi = 0 \\
% \gamma, \phi \geq 0 \\
nonlinear complementarity problem (NCP)
impact force
slack variable
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{dynamics}(x_{t+1}, \gamma) = 0\\
\quad \:\: \textbf{sdf}(x_{t+1}) = \phi \\
\gamma \circ \phi = 0 \\
% \gamma, \phi \geq 0 \\
nonlinear complementarity problem (NCP)
impact force
slack variable
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{dynamics}(x_{t+1}, \gamma) = 0\\
\quad \:\: \textbf{sdf}(x_{t+1}) = \phi \\
\gamma \circ \phi = 0 \\
\gamma, \phi \geq 0 \\
impact force
slack variable
nonlinear complementarity problem (NCP)
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{linear dynamics}(x_{t+1}, \gamma) = 0\\
\quad \:\: \textbf{sdf}(x_{t+1}) = \phi \quad \quad \quad \\
\gamma \circ \phi = 0 \quad \quad \quad \quad \\
\gamma, \phi \geq 0 \quad \quad \quad \quad \\
strategic linearization
\underset{x_{t+1}}{\text{find}} \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \\
\text{subject to} \quad \textbf{linear dynamics}(x_{t+1}, \gamma) = 0\\
\quad \quad \quad \quad \textbf{linear sdf}(x_{t+1}) = \phi \quad \quad \quad \\
\gamma \circ \phi = 0 \quad \quad \quad \quad \\
\gamma, \phi \geq 0 \quad \quad \quad \quad \\
linear complementarity problem (LCP)
benefits of LCP formulation
preserve contact reasoning
→ adapt contact sequence online

benefits of LCP formulation
preserve contact reasoning
→ adapt contact sequence online
computational gains
→ real-time performance


contact-implicit MPC
\underset{x_{1:T}, u_{1:T-1}}{\text{minimize}} \quad \sum_{t=1}^{T} l_t(x_t, u_t) + l_T(x_T) \\
\text{subject to} \quad \:\:\: x_{t+1} = A_t x_t + B_t u_t + c_t \\
\quad (x_1 \, \text{given})
% \quad \quad \quad \: \: \: D_t x_t + E_t u_t + f_t \geq 0
contact-implicit MPC
\underset{x_{1:T}, u_{1:T-1}}{\text{minimize}} \quad \sum_{t=1}^{T} l_t(x_t, u_t) + l_T(x_T) \\
\text{subject to} \quad \:\:\: \sout{x_{t+1} = A_t x_t + B_t u_t + c_t} \\
\quad (x_1 \, \text{given})
% \quad \quad \quad \: \: \: D_t x_t + E_t u_t + f_t \geq 0
contact-implicit MPC
\underset{x_{1:T}, u_{1:T-1}}{\text{minimize}} \quad \sum_{t=1}^{T} l_t(x_t, u_t) + l_T(x_T) \\
\text{subject to} \quad \:\:\: \sout{x_{t+1} = A_t x_t + B_t u_t + c_t} \\
\quad \quad \quad \quad x_{t+1} = \textbf{LCP}_t(x_t, u_t) \\
\quad (x_1 \, \text{given})
% \quad \quad \quad \: \: \: D_t x_t + E_t u_t + f_t \geq 0
contact-implicit MPC
\underset{x_{1:T}, u_{1:T-1}}{\text{minimize}} \quad \sum_{t=1}^{T} l_t(x_t, u_t) + l_T(x_T) \\
\text{subject to} \quad \:\:\: x_{t+1} = \textbf{LCP}_t(x_t, u_t)\\
\quad (x_1 \, \text{given})
% \quad \quad \quad \quad x_{t+1} = \textbf{LCP}(x_t, u_t) \\
% \quad \quad \quad \: \: \: D_t x_t + E_t u_t + f_t \geq 0
dynamics evaluation
dynamics gradient
solve LCP problem
differentiate LCP problem
model-predictive control


contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer
model-predictive control
contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer



model-predictive control
contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer
model-predictive control
Taylor Howell
Simon Le Cleac'h
Jan Brüdigam
Zico Kolter
Mac Schwager
Zachary Manchester
team
Shuo Yang
Chi Yen Lee








github.com/dojo-sim
Apple
august 9, 2022
Simon Le Cleac'h
a differentiable physics engine for robotics
Simon Le Cleac'h and Taylor Howell
Taylor Howell
Simon Le Cleac'h
team
thowell@stanford.edu
simonlc@stanford.edu
Dojo key ideas
minimal vs. maximal coordinates
benefits of differentiability
applications of Dojo
overview
contact physics
LCP
implicit complementarity
gradients
samples
subgradient
existing physics engines
Dojo key ideas
stability at low rates
variational integrator
interior-point methods
accurate contact dynamics
implicit differentiation
smooth gradients
m(p_+ -2p +p_-)/h - hmg = 0
Discrete mechanics and variational integrators. J. E. Marsden and M. West.
S = \int_{t_1}^{t_2}{\mathcal{L} dt}
discretize
discretize
Euler-Lagrange
Euler-Lagrange
F = m a
p_+ = p + h (v + mg)
S_D = h \sum_{i=1}^{N} \mathcal{L}_i
variational integrator
variational integrator
-
compare astronaut energy and momentum conservation to MuJoCo
- Dojo performs orders of magnitude better
- stability at low rates
t = 0s
t = 1s
accurate contact dynamics
MuJoCo linear
Dojo linear
MuJoCo nonlinear
Dojo nonlinear
no collision violations
correct Coulomb friction
interior-point method
impact → inequalities
friction → second-order cone
non linear complementarity problem
nonlinear complementarity problem
accurate contact dynamics
custom interior-point solver
- Mehrotra predictor-corrector algorithm
- CVXOpt second-order cones
- non-Euclidean support for quaternions
accurate contact dynamics
r(w^*; \theta) = 0
→
smooth gradients
\big\{
residual
solution
\big\{
\big\{
parameters
nonlinear complementarity problem
sensitivity of solution w.r.t problem data
computation cost of gradient is less than simulation step
differentiate intermediate barrier problems for smooth gradients
smooth gradients
Lezioni di analisi infinitesimale. U. Dini.
less expensive to compute compared to finite-difference or stochastic sampling
randomized smoothing
finite difference
Dojo
matrix backward substitution
\mathcal{O}(n^2)
matrix factorization
\mathcal{O}(n^3)
matrix factorization
\mathcal{O}(n^3)
smooth gradients
box push
non-smooth dynamics
gradient comparison
Dojo
randomized smoothing
less expensive to compute compared to finite-difference or stochastic sampling
smooth gradients
maximal-coordinates representation
minimal-coordinates
representation
(x,v,q,\omega) \in \mathbf{R}^{13}
(\theta_1, \dot{\theta}_1) \in \mathbf{R}^2
(\theta_2, \dot{\theta}_2) \in \mathbf{R}^2
(\theta_3, \dot{\theta}_3) \in \mathbf{R}^2
\mathbf{R}^{37}
maximal-coordinates
representation
(x_1,v_1,q_1,\omega_1) \in \mathbf{R}^{13}
\mathbf{R}^{169}
(x_2,v_2,q_2,\omega_2) \in \mathbf{R}^{13}
(x_3,v_3,q_3,\omega_3) \in \mathbf{R}^{13}
(x_4,v_4,q_4,\omega_4) \in \mathbf{R}^{13}
maximal-coordinates representation
Linear-Time Variational Integrators in Maximal Coordinates. J. Brudigam and Z. Manchester.
Linear-Time Contact and Friction Dynamics in Maximal Coordinates using Variational Integrators.
J. Brudigam and Z. Manchester.
maximal-coordinates representation
github.com/dojo-sim
- Julia package: Dojo.jl
- gym-like environments
- Python wrapper: dojopy
- interface w/ PyTorch & JAX
open-source implementation
examples
trajectory optimization
smooth-gradient-based optimization with iterative LQR
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
reinforcement learning
train static linear policies for locomotion
gradients enable 5-10x sample-complexity improvement over derivative-free method
stability at low rates enables 2-5x sample-complexity improvement over MuJoCo
system identification
ContactNets: Learning Discontinuous Contact Dynamics with Smooth, Implicit Representations. S. Pfrommer, M. Halm, and M. Posa.
learned
ground-truth
real-word dataset
Dojo environment
system identification
geometry
friction coefficient
ground-truth
learned
Quasi-Newton method utilizes gradients to
learn parameters to 95% accuracy in 20 steps
contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer
model-predictive control
contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer
model-predictive control
contact-implicit trajectory optimization
contact-implicit MPC
hardware transfer
model-predictive control
model-predictive control
Fast Contact-Implicit Model-Predictive Control.
S. Le Cleac'h & T. Howell, C. Lee, S. Yang, M. Schwager, Z. Manchester
simulation
push recovery
behavior generation
running policy at 200-500Hz
NeRF
Differentiable Physics Simulation of Dynamics-Augmented Neural Objects. S. Le Cleac'h, HX. Yu, M. Guo, T. Howell, R. Gao, J. Wu, Z. Manchester, M. Schwager
dynamics-augmented NeRF → complex collision geometries
Taylor Howell
Simon Le Cleac'h
Jan Brüdigam
Zico Kolter
Mac Schwager
Zachary Manchester
team
Shuo Yang
Chi Yen Lee
github.com/dojo-sim
systemX
march 4, 2022
Simon Le Cleac'h and Taylor Howell
Dojo:
A differentiable simulator for robotics
Simon Le Cleac'h and Taylor Howell
a simulator for robotics that prioritizes
physical accuracy
and
differentiability
isn't simulation a solved problem?
impact
Dojo
MuJoCo
friction
Dojo
- nonlinear (blue)
- linear (orange)
MuJoCo
- nonlinear (black)
- linear (magenta)
friction cones
approximation
exact
gradients
task: push object up to goal
gradients

code:
https://github.com/dojo-sim
paper:
https://arxiv.org/abs/2203.00806
collaborations
simonlc@stanford.edu (Simon)
thowell@stanford.edu (Taylor)
- manipulation
- reinforcement learning
-
open-source development
- GPU support
- advanced collision detection
simon's talks
By simonlc



