Autoenconders
Cristóbal Silva
What's an Autoencoder?
Encoder
Decoder
Low Dimensional
Representation
Input
Output
Just an MLP where
input size = output size
W_1
W_2
W_3
W_4
Advantages
- Undercomplete representation forces algorithm to learn most important features
- Can be transferred to other domains once it has been trained
- Can be used as generative models under certain conditions
Tying Weights
Encoder
Transposed Encoder
Low Dimensional
Representation
Input
Output
Half the parameters!
W_1
W_2
W_2^\texttt{T}
W_1^\texttt{T}
Tying Weights
import tensorflow as tf
w_encode_1 = tf.Variable(w_encode_1_init, dtype=tf.float32)
w_encode_2 = tf.Variable(w_encode_2_init, dtype=tf.float32)
w_decode_2 = tf.transpose(w_encode_2) # tied weights
w_decode_1 = tf.transpose(w_encode_1) # tied weightsTensorflow
from torch.autograd import Variable
w_encode_1 = Variable(w_encode_1_init)
w_encode_2 = Variable(w_encode_2_init)
w_decode_2 = w_encode_2.t() # tied weights
w_decode_1 = w_encode_1.t() # tied weights
# alternative
def forward(self, x):
x = self.encode_1(x)
x = self.encode_2(x)
x = F.linear(x, weight=self.encode_1.weight.t()) # tied weights
x = F.linear(x, weight=self.encode_2.weight.t()) # tied weights
return xPyTorch
Note: biases are never tied, nor regularized
Denoising Autoencoders
Encoder
Decoder
Low Dimensional
Representation
Corrupted Input
Clean Output
Better reconstruction!
W_1
W_2
W_3
W_4
What is corruption?
Adding noise
Shutting down nodes
+
=
\varepsilon
\Rightarrow
=
Denoising autoencoder prevents neurons from colluding with each other, i.e. it forces each neuron or a small group of neurons to do its best in reconstructing the input
Sparse Autoencoders
Encoder
Decoder
Low Dimensional
Representation
Input
Output
Efficient representation!
W_1
W_2
W_3
W_4
Why Sparsity?
- Force the least amount of nodes per activation for compact representation
- Each neuron in the hidden layers represents a useful feature
- Requires to compute the average activation in the coding layer over the training batch (*)
(*): Avoid small batches, or the mean will not be accurate
Sparsity Loss
D_{KL}(P \| Q) = p \log \frac{p}{q} + (1 - p) \log \frac{1 - p}{1 - q}
def kl_divergence(p, q):
return p * tf.log(p / q) + (1 - p) * tf.log((1 - p) / (1 - q))
reconstruction_loss = tf.reduce_mean(tf.square(outputs - X)) # MSE
sparsity_loss = tf.reduce_sum(kl_divergence(sparsity_target, hidden_mean))
loss = reconstruction_loss + sparsity_weight * sparsity_lossVariational Autoencoders
Encoder
Decoder
Input
Output
\mu
\sigma
Generative model!
Low Dimensional
Representation
W_1
W_2^{\sigma}
W_3^{\sigma}
W_4
W_2^{\mu}
W_3^{\mu}
q(z|x)
p(x|z)
+
W_3^{\mu}
W_3^{\sigma}
\cdot
\varepsilon
Latent Loss
D_{KL}(Q \| \mathcal{N}(0, 1))
Penalizing this term ensures that the codings are close to a unit-gaussian.
This is useful because we only need to sample from \( \mathcal{N}(0, 1) \) and pass through the decoder network to generate from \( P(X|z) \)
Applications in HSI
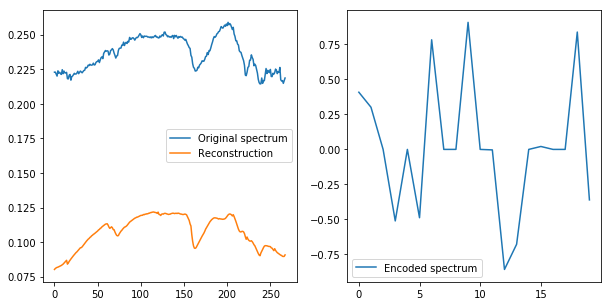
268 \rightarrow 130 \rightarrow 70 \rightarrow 40 \rightarrow 20
Stacked Autoencoder
References


https://github.com/ageron/handson-ml/blob/master/15_autoencoders.ipynb
https://github.com/GunhoChoi/Kind-PyTorch-Tutorial
AutoEnconders
By crsilva



