World modeling and
motion planning
By Ramon Wijnands
Presentation meeting #4
Problem Statement
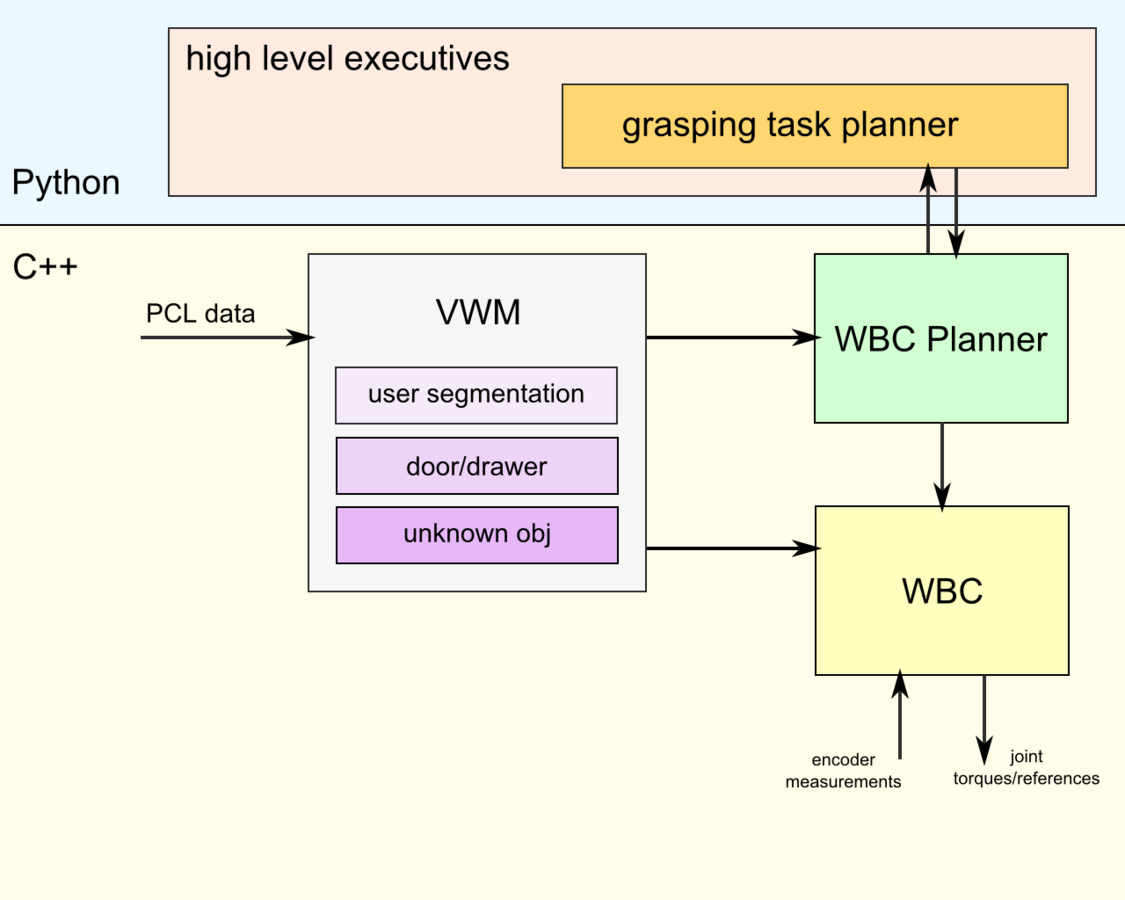
Combine a semantic, volumetric world representation with whole-body control, planning and collision avoidance
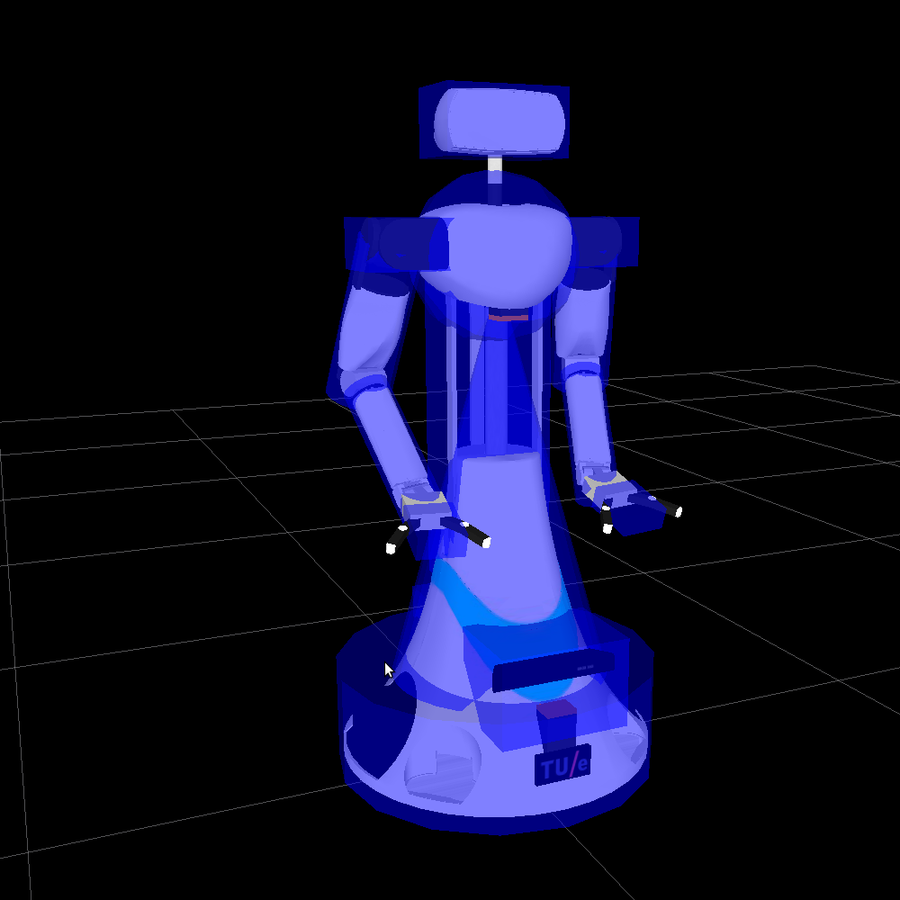
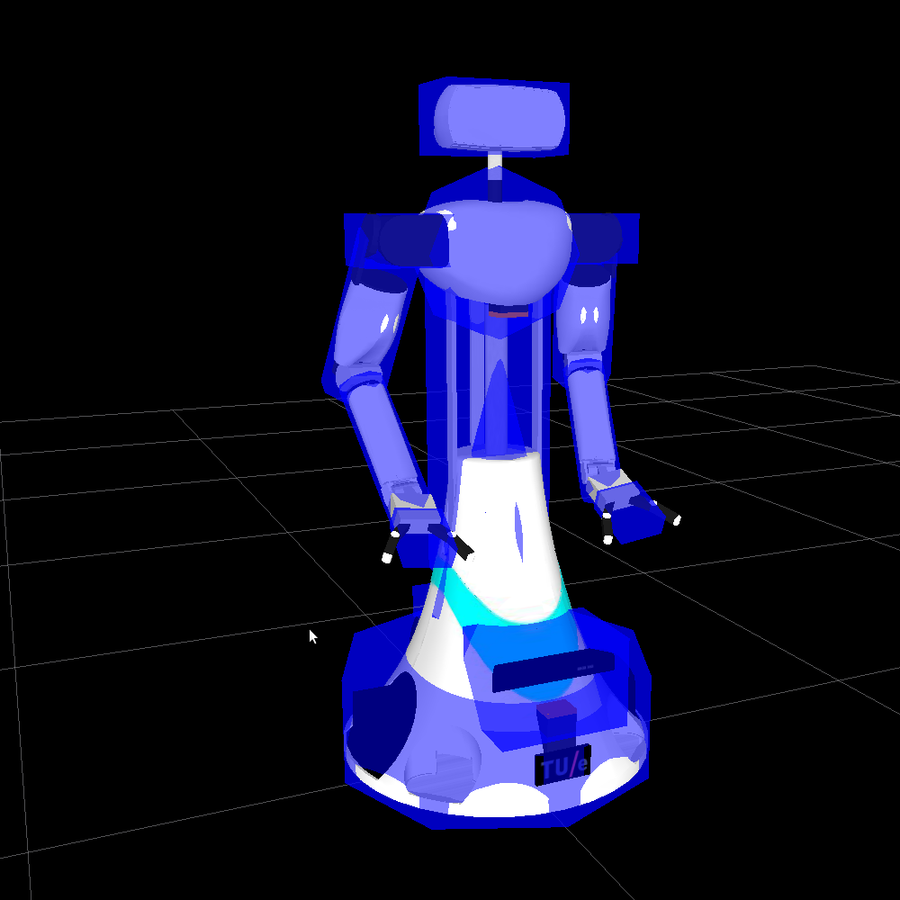
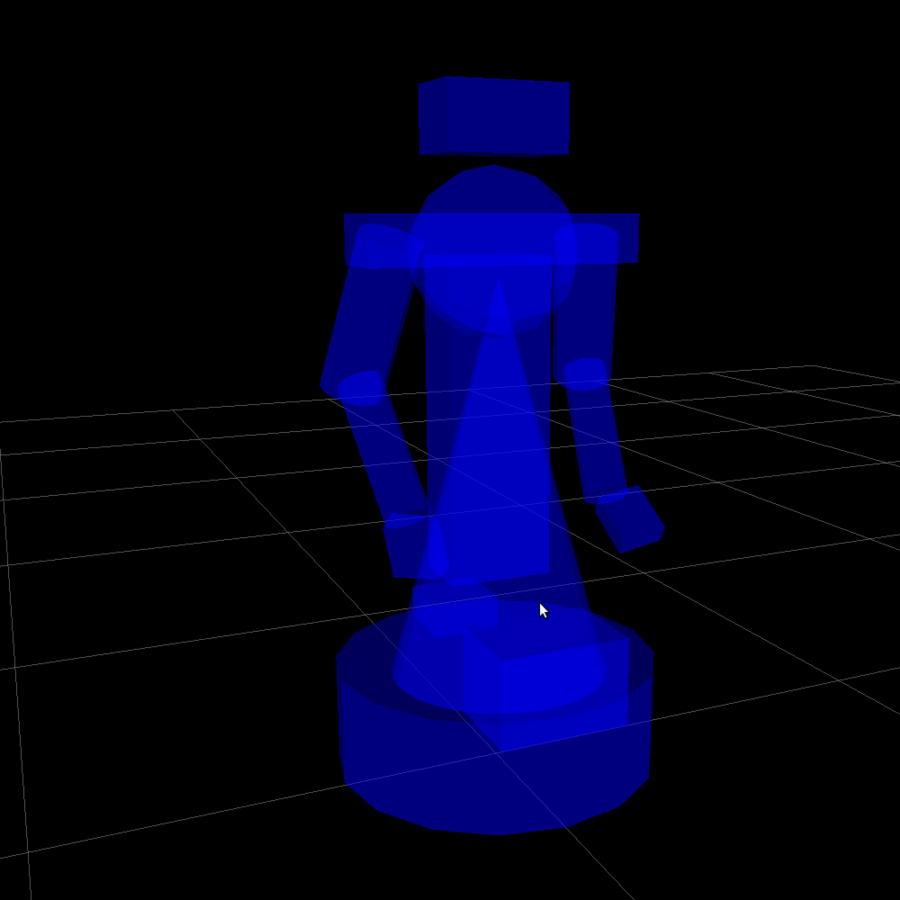
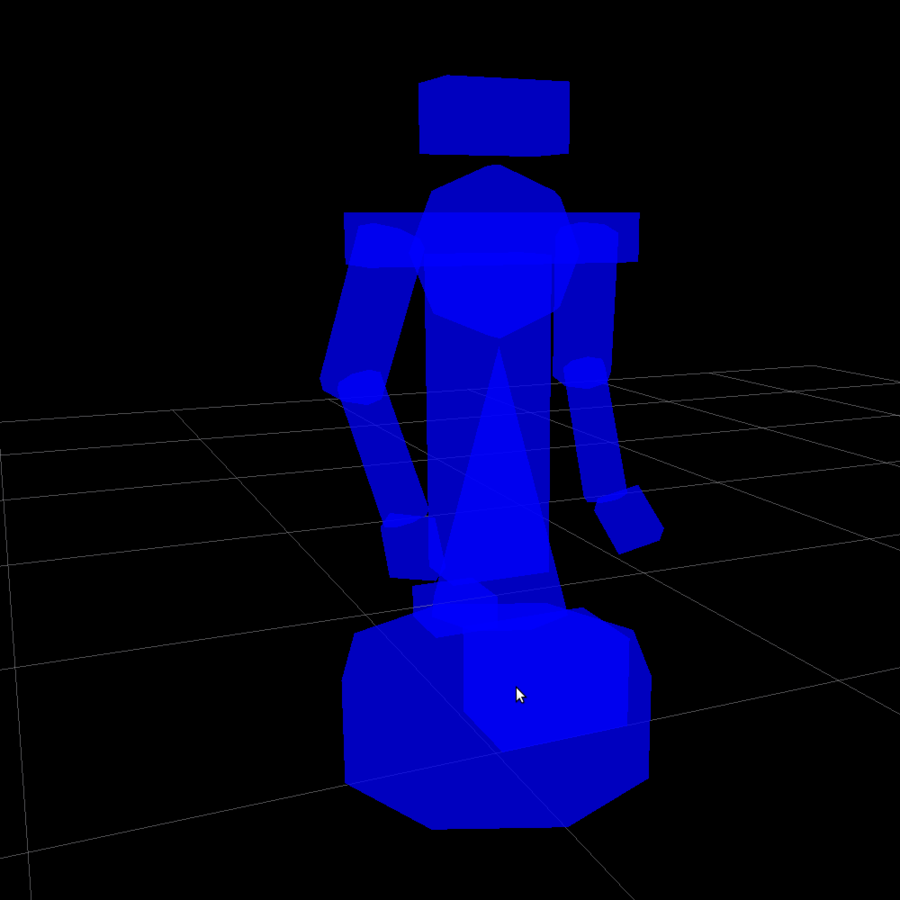
The Cone
Internal Representation
if (type == "Cone")
{
collisionBody.bt_shape = new btConeShapeZ(x-0.05,2*z);
}Visualisation
// ToDo:: Get rid of hardcoded bug fix
modelviz.scale.x = 2.3*x;
modelviz.scale.y = 3.0*z;
modelviz.scale.z = 2.3*y;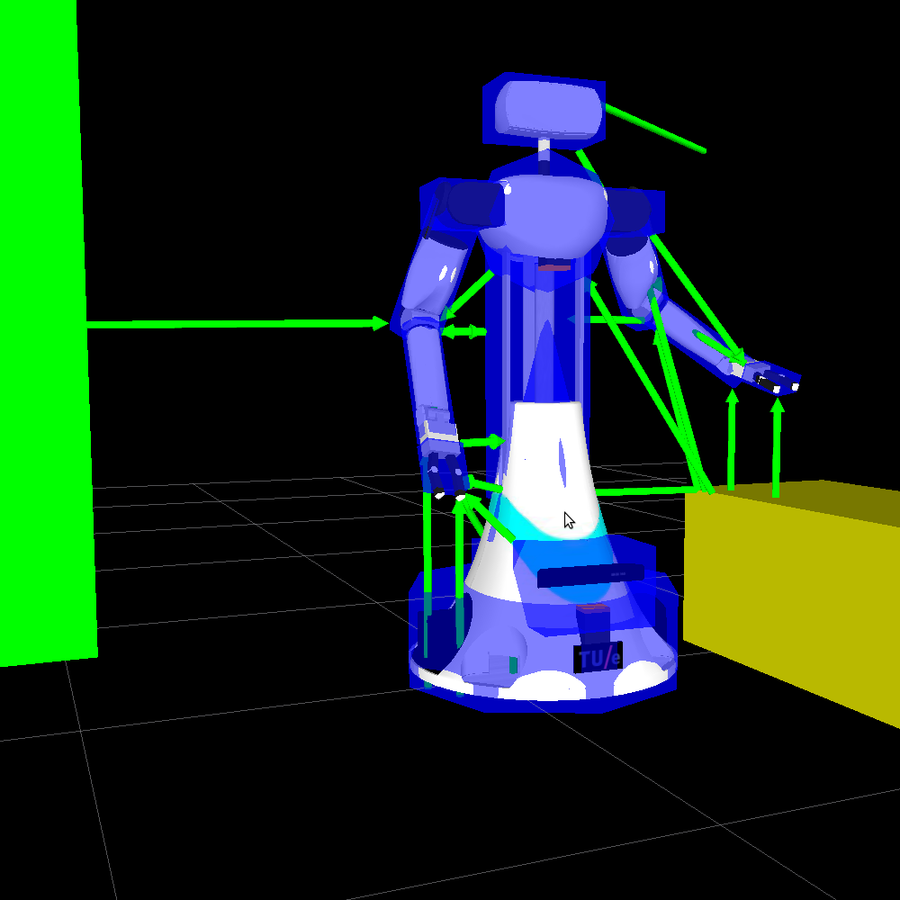
Performance
CollisionAvoidance takes ~15 ms (67 Hz)
| self collision Bullet | 2.0 % |
| self collision FCL | 44.3 % |
| environment | 23.7 % |
| unknown | 30.0 % |
Next Week
- verify all the calculated distances
- verify the calculated forces
- compare the results from both implementations
- verify the computation of wrenches
- verify the computation of joint torques
Next month
- test the behavior of the WBC in the simulator
- test the new implementation on the robot
- test the performance of the WBC with VWM objects
- on-the-fly exclude certain VWM objects
- integrate the VWM with the WBC planner
- grab a VWM object
TODO
- minimize the use of Bullet/FCL variables
- use Eigen as internal representation
- better performance analysis
- compile the WBC without Bullet or FCL
Presentation meeting #4
By rayman