



federica bianco PRO
astro | data science | data for good
all chapters
Instructor: Dr. Bianco
TAs: Joey Betz; Lily Padlow
University of Delaware - Spring 2021
KEY POINTS:
H&R CH1 measuring things - including length
unit conversion
USE SI UNLESS YOU ARE INSTRUCTED OTHERWISE
DIMENSIONAL ANALYSIS
H&R CH1 measuring things - including length
whenever I have an equation
(always every single time I have an = sign!!!)
this will be super helpful starting next class!
H&R CH2 1D motion - velocity - acceleration
H&R CH2 1D motion - velocity - acceleration
KEY POINTS:
1D motion
H&R CH2 1D motion - velocity - acceleration
H&R CH2 1D motion - velocity - acceleration
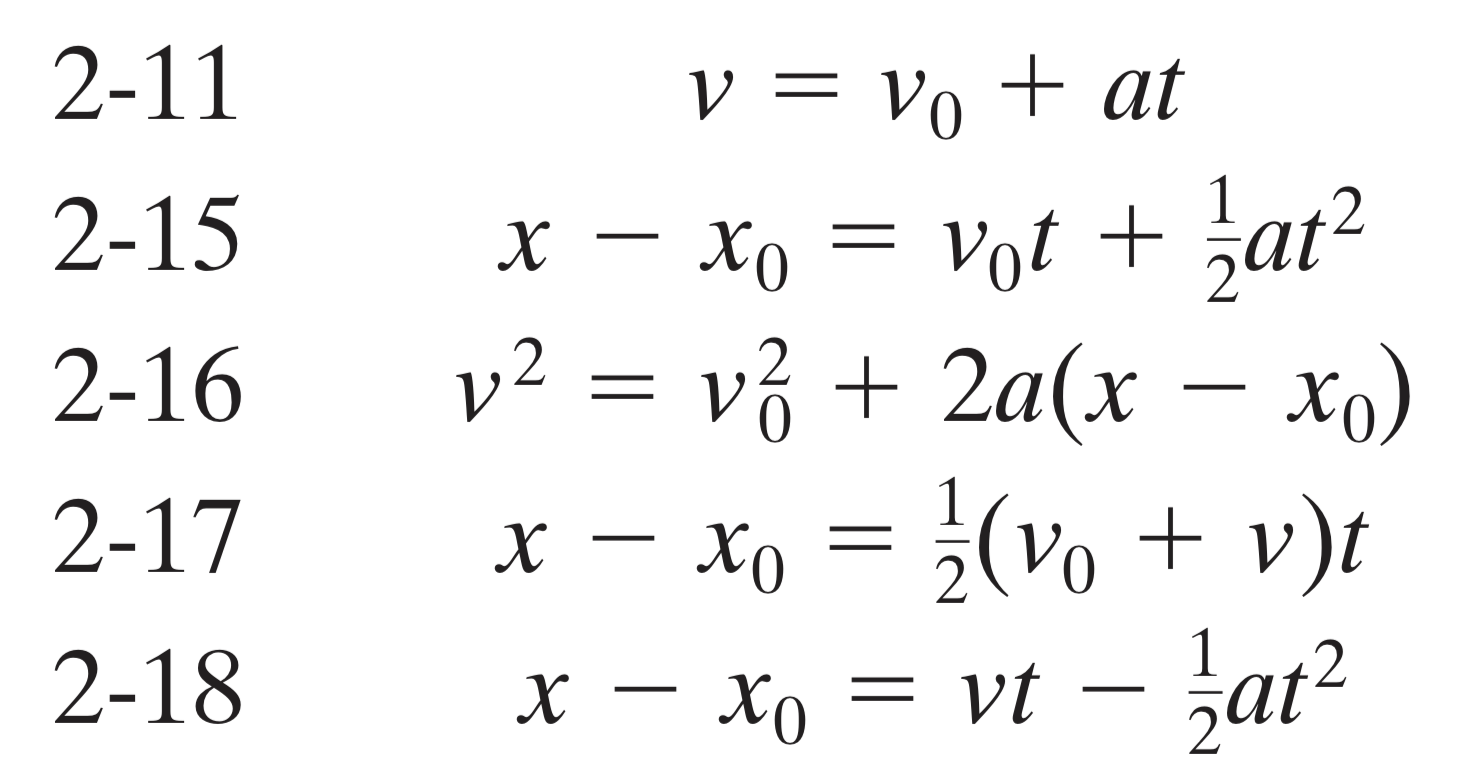
Equations of motion in 1D
you do not need to memorize them necessarily but you should be extremely familiar with them and know how to use each one.
When you try and remember them on the fly, think about the dimensional analysis.
To equate to displacement, velocity needs to be multipled by time.
To equate displacement acceleration has to be multiplied by time-squared
In a few weeks, you should have solved enough problems that you will have them memorized without even trying!
STEP 1. Put together all the information you have
STEP 2. Put the info in a frame of reference
STEP 3. Identify the unknown quantity
STEP 4. Choose the equation with gives you the unknown you need
A hot-air balloon is ascending at the rate of 12 m/s and is 80 m above the ground when a package is dropped over the side.
(a) How long does the package take
KEY POINTS:
H&R CH3 vectors
vectors
KEY POINTS:
H&R CH3 vectors
vectors
KEY POINTS:
motion in 2D and 3D
KEY POINTS:
H&R CH4 motion in 2D and 3D
parabolic motion
KEY POINTS:
H&R CH4 motion in 2D and 3D
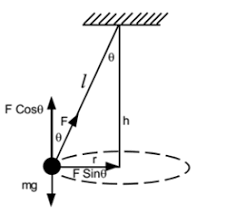
uniform circular motion
KEY POINTS:
Forces and Newton Laws
H&R CH5 Newton Laws
how to solve problems with force
4) identify if there system is initially at rest or in motion and if you need to choose the appropriate Chap2 equation of motion now that you have the acceleration from the forces.
1) make your Free Body Diagram identifying all forces acting on the body
3) identify if the system is in equilibrium or the forces are unbalanced and cause acceleration
Forces and Newton Laws
2) identify all angles and where to use cosine and sine and the component of all forces
H&R CH5 Newton Laws
KEY POINTS:
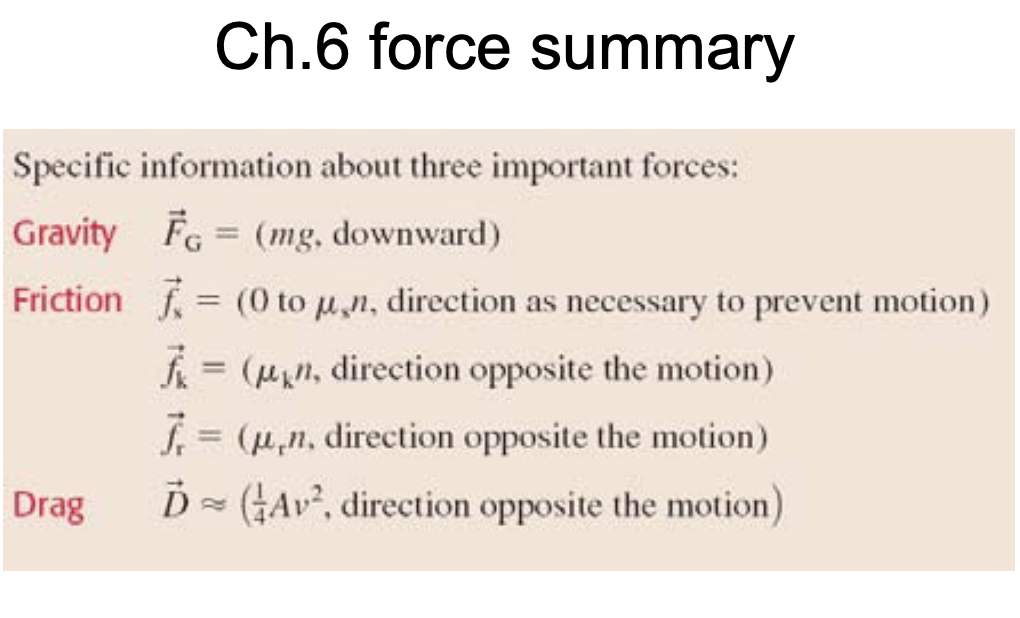
Force of friction
H&R CH6 Friction
KEY POINTS:
H&R CH6 Friction
drag
KEY POINTS:
Kinetic energy K is energy associated with the state of motion of an object.
Work is the application of a force over a distance.
Kinetic energy and work
H&R CH7 kinetic energy and work
KEY POINTS:
The potential energy relates to the force
in absence of non conservative forces, for an isolated system, the mechanical energy is conserved
potential energy and
conservation of energy
H&R CH7 kinetic energy and work
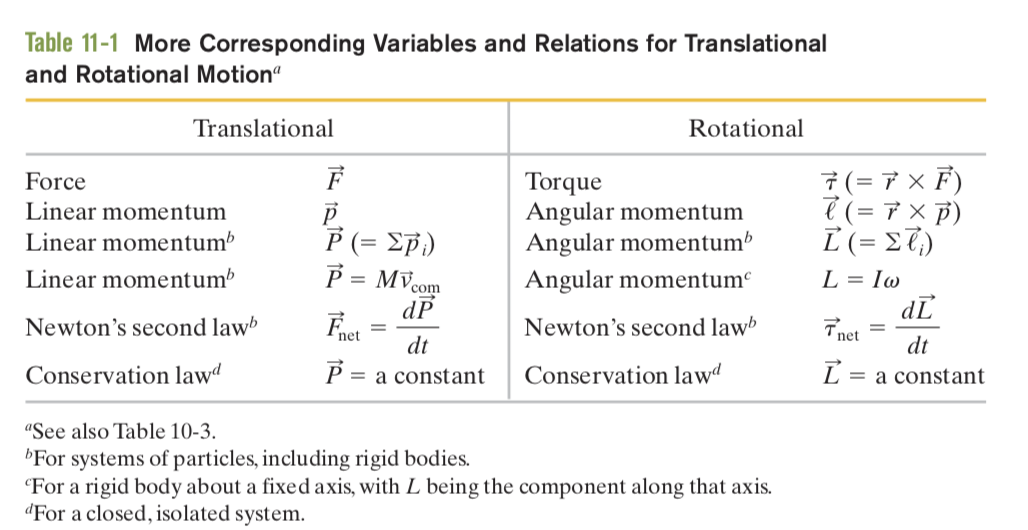
For translation
For rotation
rotational energy
Center of Mass
CoM
a system of N particles
momentum
Momentum is conserved in collisions between particles
Inelastic Collision
If energy is not conserved
Elastic Collision
If energy is conserved
Completely Inelastic Collision
If energy is not conserved
particles stick together
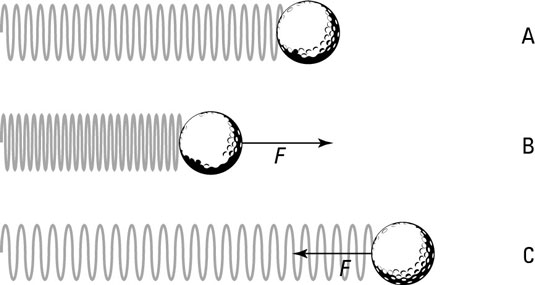
Momentum p = mv
momentum
Momentum is not always conserved. When its not, "impulse" is the difference in momentum
Momentum is conserved in collisions between particles
Inelastic Collision
If energy is not conserved
Elastic Collision
If energy is conserved
Completely Inelastic Collision
If energy is not conserved
particles stick together
Momentum p = mv
rotational forces and momentum
equilibrium
H&R CH12 equilibrium & elasticity
translational equilibrium
rotational equilibrium
must be 0 with respect to any point
Two conditions must be satisfied for equilibrium: net force AND net torque must be 0
H&R CH12 equilibrium & elasticity
elasticity
with e proportionality constant of the material
Simple Harmonic Oscillator
H&R CH15 oscillations
where A is the amplitude of the oscillation, ω is the angular frequency, and Φ the phase
H&R CH15 oscillations
H&R CH15 oscillations
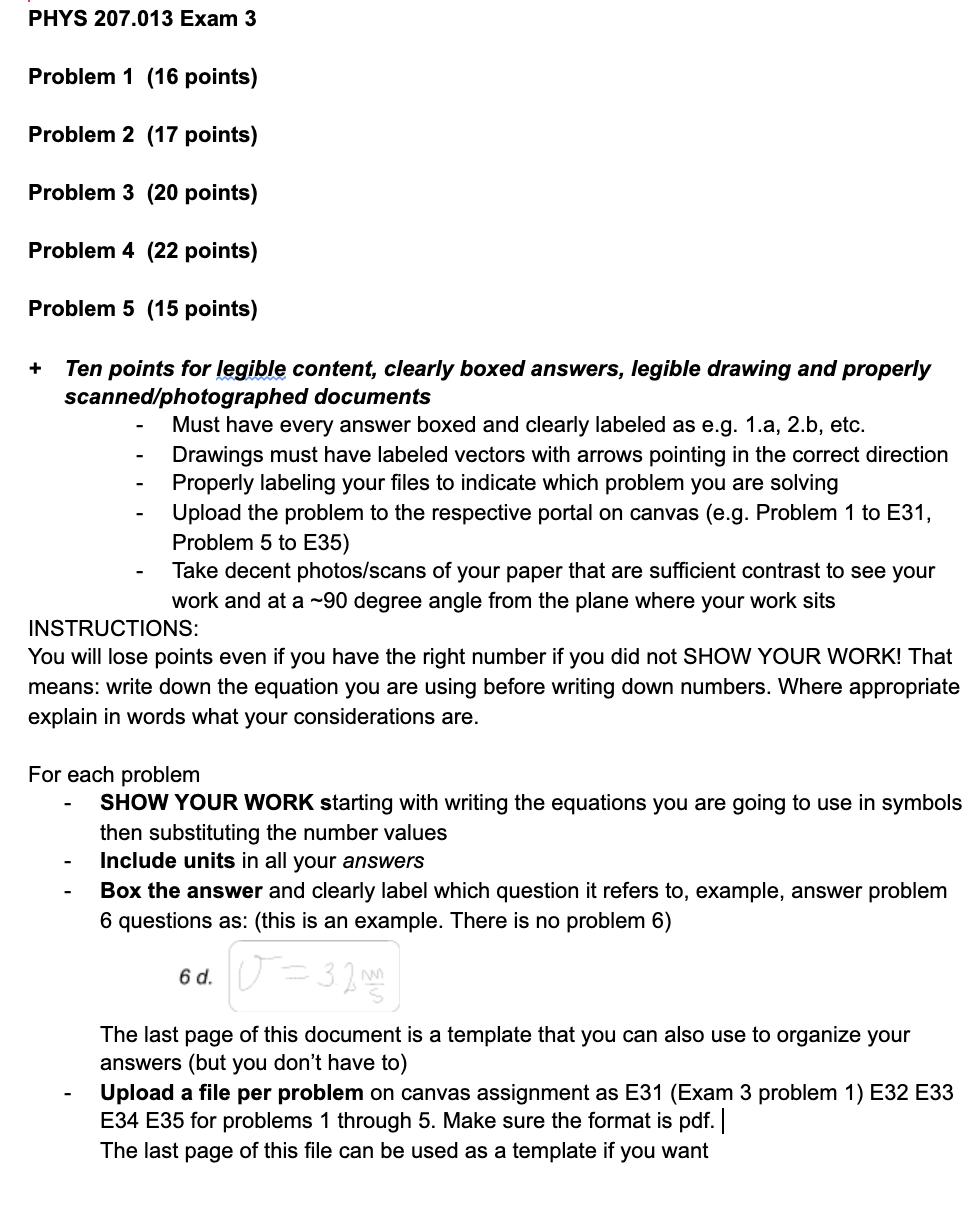
exam instructions
EXAM PREP
you have 3 hours - which is a long time. Take breaks!
exam instructions
What to have handy: remember that these exams are open-book, so also have whatever helps you solve problems handy! Also water and snacks - its 3 hours!!!
I recommend you have the equations of 1D motion always handy https://slides.com/federicabianco/phys20713_2#/6 - all ND problems we are doing can be solved as a sets of 1D problem along each axis
The value of sines, cosines, tangents for some common angles https://slides.com/federicabianco/phys20713_3#/3/4 because it is faster to look them up than to plug them into the calculator and the cheat sheet tells you more clearly if your result is in radians or degrees of angle
The derivative of some common equations (x^2, 1/x.....)
Special equations of kinematics that solve specific problems:
the Range equation https://slides.com/federicabianco/phys20713_4#/9/2,
the equations that govern circular motion https://slides.com/federicabianco/phys20713_4/edit#/11/6 and
Newton’s laws of motion https://slides.com/federicabianco/phys20713_5/live?context=editing#/13/1
EXAM PREP
Think whether the problem lets you use:
exam instructions
Draw the system: Take your time with this: it is going to save time when you work on solving the problem!
Identify the most convenient axis system to solve your problem: where does the y axis point (e.g. up or down with gravity?), what vectors are the x and y axis aligned with?
Identify with respect to what reference point the angles are given to you: if it is with respect to the axis or to a preferred direction in the problem (e.g. the forward direction, or the East-West directions). If you get this wrong the whole problem will be different and wrong.
Draw all the vectors that are described in the problem and those that are not but are implicitly known to be there (e.g. acceleration due to gravity). I recommend you use different colors if you can here, so that you do not get confused (you can raw each vector in a different color and its components with the same color along the axes for example)
Remember dimensional analysis: lots of people are losing points in the quiz cause they have the answer in the wrong units, and therefore the wrong answer!
All trigonometric functions on your calculator will give you/expect as input angles in radians unless you specify degrees. Remember 1 rad = 180/3.1415 degrees
If you input in your problem g=9.8 then you are using meters/second! That is the right unit to use - but remember: all other values will have to be input as meters, seconds, etc, and the result will be in meters, seconds, etc, not in feet or miles!!
When you figure out what equation to use, do a quick check if the dimensions are coming up to be what you expect when you solve it for the relevant quantity
EXAM PREP
exam instructions
EXAM PREP
Strategy:
Look at what the problem tells you (your data) and the equations that we studied (your tools) and
figure out which equations can give you the quantity you are asked to find. You need as many equations as unknowns.
It may take more than one step: the equations that contain the quantity you are after may also contain other unknown quantities: find an equation that will give the other unknowns and solve the equations one after the other.
Example: you may need to solve an equation of motion to find the terminal velocity, then plug that in the conservation of momentum to find the initial velocity
so long as the first equation is solved in terms of the relevant unknowns you can substitute and obtain an equation that has one fewer unknown
By federica bianco



